一种翻转送料机械手的制作方法
本技术涉及机械手相关,尤其涉及一种翻转送料机械手。
背景技术:
1、机械手是一种能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。特点是可以通过编程来完成各种预期的作业,构造和性能上兼有人和机械手机器各自的优点。
2、现有的工业生产活动中常常会借助机械手夹持物料来完成物料的转移输送工作,部分物料在借助机械手机械转移输送工作时,需要机械翻转处理操作,机械手本身虽然可以快捷的完成翻转工作,但是翻转后机械手上对物料进行夹持的夹爪,对物料进行放置工作时,就会出现与放置面干涉的问题,继而使得物料的转移工作无法稳定的完成。
3、为此,我们提出一种翻转送料机械手来解决上述问题。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的问题,而提出的一种翻转送料机械手。
2、为了实现上述目的,本实用新型采用了如下技术方案:
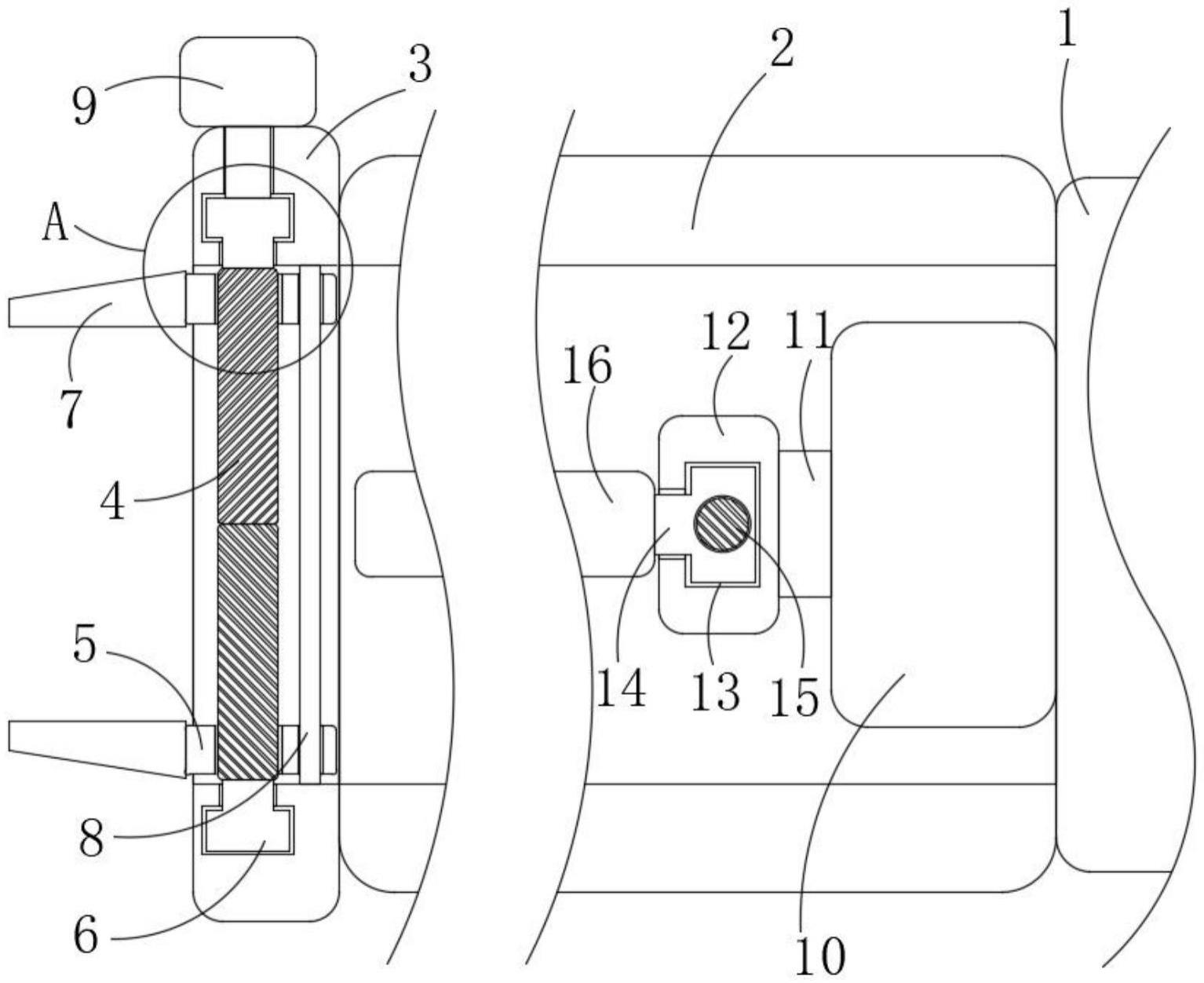
3、一种翻转送料机械手,包括机械臂,所述机械臂的一侧壁上固定连接有多个支架,多个所述支架远离机械臂的一端共同固定连接有工作框,所述工作框的两个相对内壁上均转动连接有螺纹柱,两个所述螺纹柱呈固定连接设置,两个所述螺纹柱的螺纹方向呈相反设置,两个所述螺纹柱上均螺纹贯穿有滑动座,两个所述滑动座远离机械臂的一侧壁上均固定连接有夹块,两个所述滑动座上共同贯穿有限位柱,所述限位柱的两端分别固定连接在工作框的两侧内壁上设置,两个所述滑动座均滑动连接在限位柱上设置,所述工作框的一侧外壁上设有工作电机,所述工作电机的输出端连接在其中一个螺纹柱上设置,所述机械臂靠近工作框的一侧设有辅助部件。
4、优选的,所述辅助部件包括设置在机械臂上的液压缸,所述液压缸上设有液压柱,所述液压柱上设有导轨,所述导轨正对工作框设置,所述导轨远离液压柱的一侧壁上设有轨道槽,所述轨道槽内滑动连接有两个滑动块,两个所述滑动块内均螺纹贯穿有螺纹杆,两个所述螺纹杆呈固定连接设置,两个所述螺纹杆的螺纹方向呈相反设置,两个所述螺纹杆相互远离的一端分别转动连接在轨道槽的两侧内壁上,两个所述滑动块上均固定连接有夹爪,两个所述夹爪分别位于限位柱的两侧设置,所述导轨的一侧外壁上设有转动电机,所述转动电机的工作端设置在其中一个螺纹杆上设置。
5、优选的,所述轨道槽呈凹形设置,两个所述滑动块均呈凸形设置,两个所述滑动块的形状均与轨道槽呈匹配设置。
6、优选的,所述工作框的两侧内壁上均设有旋转槽,两个所述旋转槽内均转动连接有旋转块,两个所述螺纹柱分别固定连接在两个旋转块上设置,所述工作电机的输出端固定连接在其中一个旋转块上设置。
7、优选的,所述工作框呈方形设置。
8、优选的,两个所述夹块和两个夹爪相互靠近的一侧壁上均设有防滑涂层。
9、与现有技术相比,本实用新型的有益效果是:
10、本实用新型在进行工作时,可以借助两个夹块夹持物料,然后借助机械臂完成物料的转移以及翻转工作,同时可以借助两个夹爪等结构从另外两侧再次夹持物料,同时借助液压缸使得两个夹爪可以夹持物料远离工作框,这样便可以在翻转物料后借助两个夹爪稳定的完成物料的转移后放置工作,极大的保障了机械臂翻转送料工作的顺利完成。
技术特征:
1.一种翻转送料机械手,包括机械臂(1),其特征在于,所述机械臂(1)的一侧壁上固定连接有多个支架(2),多个所述支架(2)远离机械臂(1)的一端共同固定连接有工作框(3),所述工作框(3)的两个相对内壁上均转动连接有螺纹柱(4),两个所述螺纹柱(4)呈固定连接设置,两个所述螺纹柱(4)的螺纹方向呈相反设置,两个所述螺纹柱(4)上均螺纹贯穿有滑动座(5),两个所述滑动座(5)远离机械臂(1)的一侧壁上均固定连接有夹块(7),两个所述滑动座(5)上共同贯穿有限位柱(8),所述限位柱(8)的两端分别固定连接在工作框(3)的两侧内壁上设置,两个所述滑动座(5)均滑动连接在限位柱(8)上设置,所述工作框(3)的一侧外壁上设有工作电机(9),所述工作电机(9)的输出端连接在其中一个螺纹柱(4)上设置,所述机械臂(1)靠近工作框(3)的一侧设有辅助部件。
2.根据权利要求1所述的一种翻转送料机械手,其特征在于,所述辅助部件包括设置在机械臂(1)上的液压缸(10),所述液压缸(10)上设有液压柱(11),所述液压柱(11)上设有导轨(12),所述导轨(12)正对工作框(3)设置,所述导轨(12)远离液压柱(11)的一侧壁上设有轨道槽(13),所述轨道槽(13)内滑动连接有两个滑动块(14),两个所述滑动块(14)内均螺纹贯穿有螺纹杆(15),两个所述螺纹杆(15)呈固定连接设置,两个所述螺纹杆(15)的螺纹方向呈相反设置,两个所述螺纹杆(15)相互远离的一端分别转动连接在轨道槽(13)的两侧内壁上,两个所述滑动块(14)上均固定连接有夹爪(16),两个所述夹爪(16)分别位于限位柱(8)的两侧设置,所述导轨(12)的一侧外壁上设有转动电机(17),所述转动电机(17)的工作端设置在其中一个螺纹杆(15)上设置。
3.根据权利要求2所述的一种翻转送料机械手,其特征在于,所述轨道槽(13)呈凹形设置,两个所述滑动块(14)均呈凸形设置,两个所述滑动块(14)的形状均与轨道槽(13)呈匹配设置。
4.根据权利要求1所述的一种翻转送料机械手,其特征在于,所述工作框(3)的两侧内壁上均设有旋转槽(18),两个所述旋转槽(18)内均转动连接有旋转块(6),两个所述螺纹柱(4)分别固定连接在两个旋转块(6)上设置,所述工作电机(9)的输出端固定连接在其中一个旋转块(6)上设置。
5.根据权利要求1所述的一种翻转送料机械手,其特征在于,所述工作框(3)呈方形设置。
6.根据权利要求2所述的一种翻转送料机械手,其特征在于,两个所述夹块(7)和两个夹爪(16)相互靠近的一侧壁上均设有防滑涂层。
技术总结
本技术公开了一种翻转送料机械手,包括机械臂,所述机械臂的一侧壁上固定连接有多个支架,多个所述支架远离机械臂的一端共同固定连接有工作框,所述工作框的两个相对内壁上均转动连接有螺纹柱,两个所述螺纹柱呈固定连接设置,两个所述螺纹柱的螺纹方向呈相反设置,两个所述螺纹柱上均螺纹贯穿有滑动座,两个所述滑动座远离机械臂的一侧壁上均固定连接有夹块,两个所述滑动座上共同贯穿有限位柱,所述限位柱的两端分别固定连接在工作框的两侧内壁上设置,两个所述滑动座均滑动连接在限位柱上设置。本技术中可以有效的避免物料翻转使得机械手出现放置干涉问题,极大的保障了机械手翻转送料工作的顺利完成。
技术研发人员:王琳
受保护的技术使用者:上海麦息机械设备有限公司
技术研发日:20230602
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!