一种光伏清洁机器人的转运系统的制作方法
本申请涉及光伏清洁,具体涉及一种光伏清洁机器人的转运系统。
背景技术:
1、光伏发电是利用半导体界面的光生伏特效应将光能转变为电能的一种技术,其能量的源泉来自太阳能,具有能量取之不尽、可再生、清洁、无污染等优点,是一种应用前景广阔的清洁能源技术。光伏发电中重要的部件是光伏板,光伏板一般安装在阳光充沛的室外环境中,以获取太阳能。由于光伏板在长期使用过程中其表面容易堆积灰尘、鸟粪、树叶等脏物,而堆积在光伏板表面的脏物会减小光伏板的阳光照射面积和吸光效率,从而严重影响光伏板的发电效率。为了提高光伏板的发电效率,需要定期对光伏板的表面进行清洁。
2、为此,业界开发出了光伏清洁机器人,其可在光伏板上移动以进行清扫。然而,现有的光伏清洁机器人只能在彼此相连的光伏板阵列上移动,而无法移动至不相连的光伏板阵列上。现有技术中对于成排排布的光伏板阵列,常常每一排光伏阵列上配置一个光伏清洁机器人,如此使得光伏清洁的成本增加。对此,现有技术中也有采用转运车转运光伏清洁机器人的方案,然而在一些现有技术中,转运车的角度及高度不可调,如此不利于将光伏清洁机器人在有高度或角度差异的光伏阵列间转运;在另一些现有技术中,如公告号为cn205873818u的中国实用新型专利,其公开了转运车的高度及角度可调,然而其高度和角度需分别由不同的机构分别调节,结构复杂、调节精度差、调节效率低,不便于调节。
3、鉴于此,有必要提出一种新的技术方案,以克服现有技术存在的不足。
技术实现思路
1、本申请提供一种光伏清洁机器人的转运系统,可便于实现光伏清洁机器人的角度及高度调节。
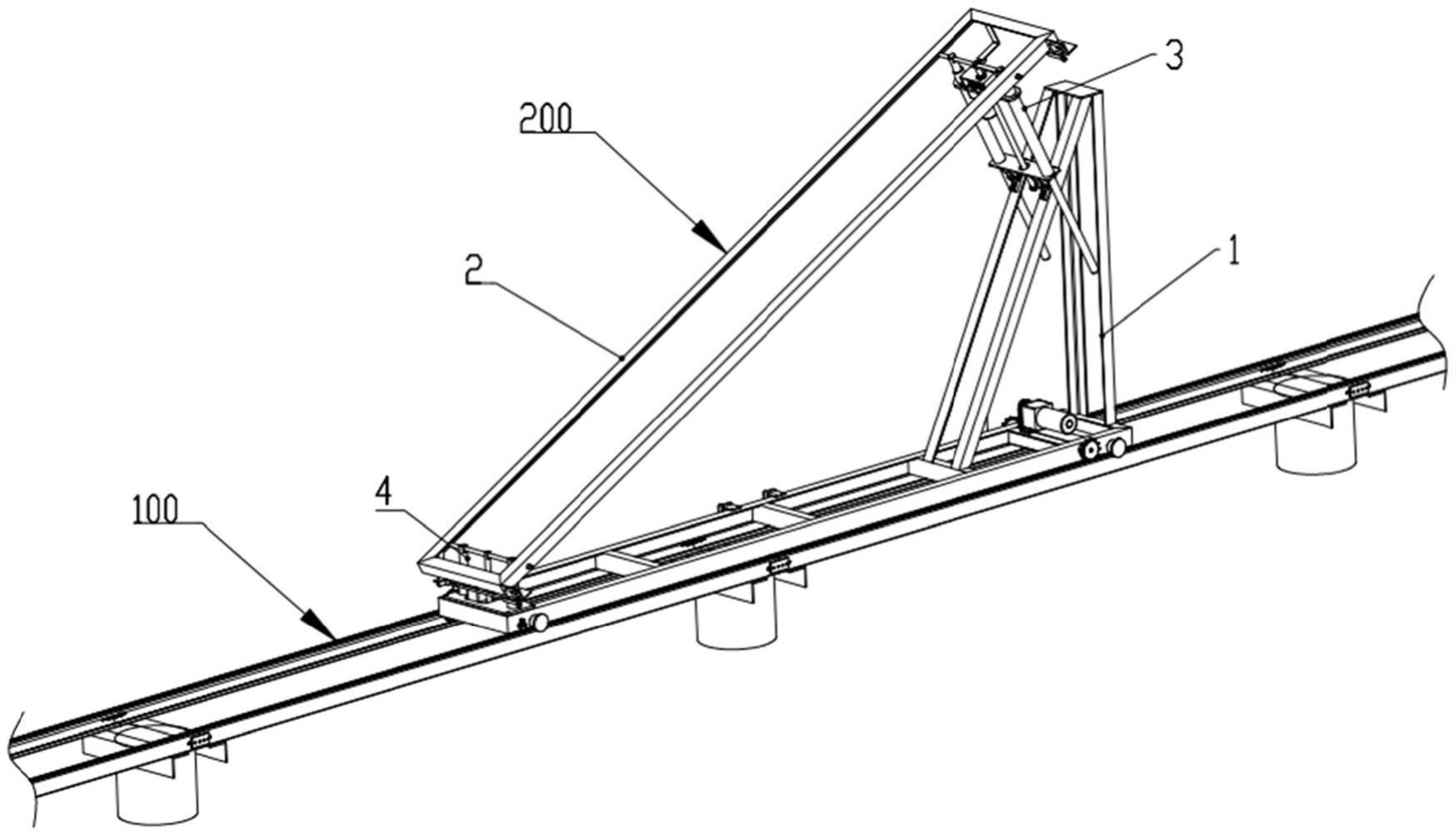
2、本申请通过如下技术方案实现:一种光伏清洁机器人的转运系统,适于将清洁机器人在不同行或不同列的光伏板阵列之间转移,所述转运系统包括轨道和可在所述轨道上移动的转运车,其中,所述转运车包括:
3、底框架,设置于所述轨道上,所述底框架构造为适于沿所述轨道平移;
4、停靠架,构造为适于供光伏清洁机器人停靠于其上,所述停靠架呈倾斜地置于所述底框架上,形成具有高度差的上端部和下端部;以及
5、升降装置,配置为可对所述停靠架的上端部和下端部分别进行升降调节;
6、其中,所述升降装置包括对所述停靠架的上端部进行升降调节的上升降装置,和对所述停靠架的下端部进行升降调节的下升降装置;通过对所述上端部和下端部的高度分别调节,以调节所述停靠架的高度及倾斜角度;
7、其中,所述上升降装置包括上推杆和上口上连接座,所述上口上连接座上安装有上口升降电机、由上口升降电机驱动的齿轮组,以及由齿轮组带动旋转的上口丝杠螺母,所述上推杆为与所述上口丝杠螺母啮合传动的丝杠。
8、作为本申请进一步改进的技术方案,所述上推杆与所述停靠架的上端部枢转连接。
9、作为本申请进一步改进的技术方案,在所述停靠架的升降过程中,所述上推杆与所述停靠架之间的夹角配置为在80°-100°之间变化。
10、作为本申请进一步改进的技术方案,所述上升降装置包括与所述停靠架的上端枢转连接的上连接轴,所述上推杆的上端连接于所述上连接轴上。
11、作为本申请进一步改进的技术方案,所述上升降装置包括上口导向轴,所述上口导向轴为多条且相对于所述上推杆呈对称分布。
12、作为本申请进一步改进的技术方案,所述上口导向轴的上端连接于所述上连接轴。
13、作为本申请进一步改进的技术方案,所述上口导向轴的外侧还套设有上口导向轴套。
14、作为本申请进一步改进的技术方案,所述底框架包括靠近所述停靠架的上端部的支撑架,所述支撑架具有朝向所述停靠架的斜面,所述上升降装置的下端枢转连接于所述支撑架的斜面上。
15、作为本申请进一步改进的技术方案,所述上升降装置的下端包括上口下连接座,所述上口下连接座与所述支撑架枢转连接,所述上口下连接座上设有供所述上推杆的下端穿过的穿孔,所述上推杆的下端设有避免上推杆的下端向上从所述穿孔中脱离的限位件。
16、本申请提供的光伏清洁机器人的转运系统,其升降装置配置为可对停靠架的上端部和下端部分别进行升降调节;底框架对应停靠架的上端部设有朝向停靠架凸伸的支撑架,所述升降装置包括对所述停靠架的上端部进行升降调节的上升降装置,所述上升降装置设置于所述支撑架和所述停靠架的上端部之间,所述上升降装置在自所述支撑架向所述停靠架的延伸方向上,相对于竖直方向朝向所述停靠架的下端部倾斜;可便于实现光伏清洁机器人的角度、高度调节以及稳定承载。
技术特征:
1.一种光伏清洁机器人的转运系统,适于将清洁机器人在不同行或不同列的光伏板阵列之间转移,所述转运系统包括轨道和可在所述轨道上移动的转运车,其特征在于,所述转运车包括:
2.如权利要求1所述的光伏清洁机器人的转运系统,其特征在于,所述上推杆与所述停靠架的上端部枢转连接。
3.如权利要求2所述的光伏清洁机器人的转运系统,其特征在于,在所述停靠架的升降过程中,所述上推杆与所述停靠架之间的夹角配置为在80°-100°之间变化。
4.如权利要求2所述的光伏清洁机器人的转运系统,其特征在于,所述上升降装置包括与所述停靠架的上端部枢转连接的上连接轴,所述上推杆的上端连接于所述上连接轴上。
5.如权利要求4所述的光伏清洁机器人的转运系统,其特征在于,所述上升降装置包括上口导向轴,所述上口导向轴为多条且相对于所述上推杆呈对称分布。
6.如权利要求5所述的光伏清洁机器人的转运系统,其特征在于,所述上口导向轴的上端连接于所述上连接轴。
7.如权利要求5所述的光伏清洁机器人的转运系统,其特征在于,所述上口导向轴的外侧还套设有上口导向轴套。
8.如权利要求2所述的光伏清洁机器人的转运系统,其特征在于,所述底框架包括靠近所述停靠架的上端部的支撑架,所述支撑架具有朝向所述停靠架的斜面,所述上升降装置的下端枢转连接于所述支撑架的斜面上。
9.如权利要求8所述的光伏清洁机器人的转运系统,其特征在于,所述上升降装置的下端包括上口下连接座,所述上口下连接座与所述支撑架枢转连接,所述上口下连接座上设有供所述上推杆的下端穿过的穿孔,所述上推杆的下端设有避免上推杆的下端向上从所述穿孔中脱离的限位件。
技术总结
本申请提供一种光伏清洁机器人的转运系统,包括轨道和可在轨道上移动的转运车,所述转运车包括:底框架,设置于轨道上;停靠架,呈倾斜地置于底框架上,形成具有高度差的上端部和下端部;以及升降装置,配置为可对停靠架的上端部和下端部分别进行升降调节;其中,所述升降装置包括对所述停靠架的上端部进行升降调节的上升降装置,和对所述停靠架的下端部进行升降调节的下升降装置;通过对所述上端部和下端部的高度分别调节,以调节所述停靠架的高度及倾斜角度。本申请提供的光伏清洁机器人的转运系统,可便于实现光伏清洁机器人的角度及高度调节。
技术研发人员:尉李钢,钱其杰,宋鉷,王建东,罗钏
受保护的技术使用者:杭州舜海光伏科技有限公司
技术研发日:20230607
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!