高精度定位的伸缩货叉及叉车的制作方法
本技术主要涉及到自动化仓储设备设计,尤其是一种伸缩货叉及叉车。
背景技术:
1、近年来,随着3c、新能源行业的兴起,以及工业4.0概念的推广,自动化立体仓库的应用场合越来越广,类似测试、充电这种有较长固定生产周期的工序中,特别适合自动化立体仓库的应用来解决自动化生产的需求。通常情况下,是将装有产品的测试工装,通过堆垛机放入带有测试组件的立体仓库的库位中,通过一系列自动化控制程序、命令代码操作来实现自动测试、充电等。上述类型的工艺对堆垛机的定位精度要求比较高。而伸缩货叉作为堆垛机的核心部件之一,其定位精度的影响至关重要。
2、传统的伸缩货叉通常是采用三相异步减速电机,通过链传动的方式与主动齿轮连接进行驱动,这种传动的定位精度会≥2mm。另外,传统的伸缩货叉通常是采用伸缩导轨或凸轮从动轴承配合尼龙块,来实现各级叉板之间的传动导向,其缺点非常明显,通过二级伸缩后间隙比较大,无法满足上述设备的精度要求。
技术实现思路
1、针对现有技术存在的技术问题,本实用新型提出一种高精度定位的伸缩货叉及叉车。
2、为实现上述目的,本实用新型采用的技术方案如下:
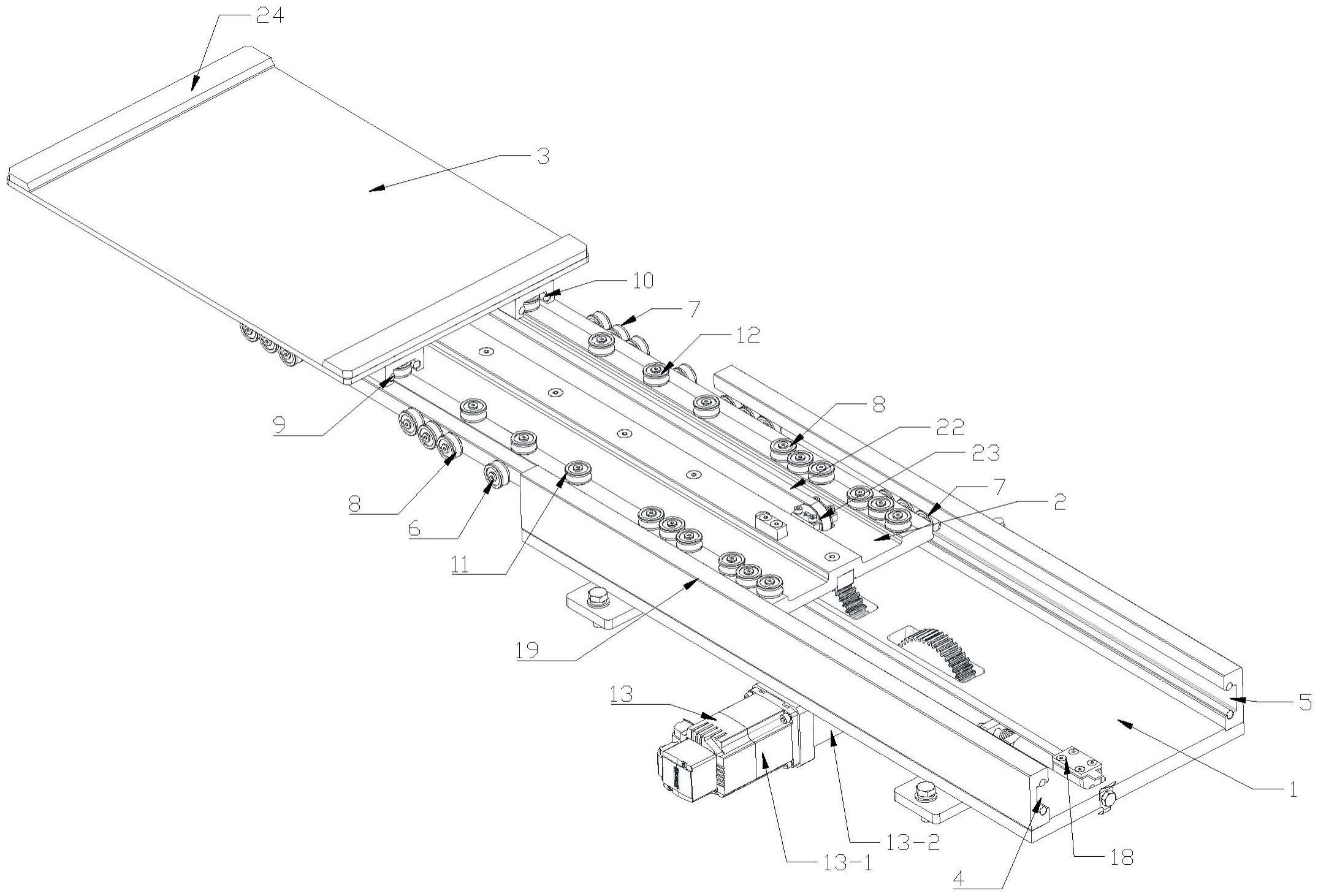
3、本实用新型提供一种高精度定位的伸缩货叉,包括下叉板、中叉板以及上叉板;所述下叉板位于最底层,下叉板上安装有提供中叉板、上叉板伸缩所需动力的驱动组件,所述中叉板安装在所述下叉板和所述上叉板之间,所述上叉板安装在中叉板上方,所述下叉板和中叉板之间沿其伸缩方向设置有第一导向机构,所述中叉板和上叉板之间沿其伸缩方向设置有第二导向机构。通过在下叉板和中叉板之间、中叉板和上叉板之间增设导向机构,来消除叉体之间运动的间隙和定位,从而达到提高伸缩货叉定位精度的目的。
4、进一步地,本实用新型所述第一导向机构和第二导向机构均由一系列的导向轮以及对应的导轨组成。
5、进一步地,本实用新型所述第一导向机构包括第一直线导轨、第二直线导轨、第一导向轮组和第二导向轮组,所述下叉板的左、右两侧边相对于其水平承托面分别垂直设置有第一直线导轨、第二直线导轨,所述中叉板的左、右侧面分别设置有包含一系列导向轮的第一导向轮组和第二导向轮组,第一导向轮组、第二导向轮组能够分别沿着第一直线导轨、第二直线导轨位移。
6、进一步地,本实用新型所述第二导向机构包括第三直线导轨、第四直线导轨、第三导向轮组和第四导向轮组,所述第三直线导轨、第四直线导轨设置在上叉板的底面两侧,所述第三直线导轨、第四直线导轨正下方的中叉板上对应设置有包含一系列导向轮的第三导向轮组和第四导向轮组,第三导向轮组、第四导向轮组能够分别沿着第三直线导轨、第四直线导轨位移。
7、进一步地,本实用新型所述第一导向轮组与第一直线导轨之间、第二导向轮组与第二直线导轨之间、第三导向轮组与第三直线导轨之间、第四导向轮组与第四直线导轨之间的导向接触面均为圆弧形线接触。
8、进一步地,本实用新型所述驱动组件包括用于提供动力的伺服驱动电机组件、用于动力传动的传动齿轮组件、用于连接和驱动上叉板进行同步运动的同步组件。
9、进一步地,本实用新型所述伺服驱动电机组件包括绝对值伺服电机与行星减速机,所述绝对值伺服电机连接行星减速机,所述行星减速机的输出端连接传动齿轮组件。
10、进一步地,本实用新型所述传动齿轮组件包括主动齿轮、两个从动齿轮以及设置在中叉板上的直线齿条,所述直线齿条设置在两个从动齿轮正上方的中叉板底面,直线齿条与两个从动齿轮的同步啮合,所述行星减速机的输出端连接主动齿轮,驱动主动齿轮转动,带动主动齿轮其两侧的两从动齿轮同步转动,两从动齿轮带动中叉板伸缩。
11、进一步地,本实用新型所述同步组件包括第一同步带张紧件、第一同步带、第一转向轮、第二同步带张紧件、第二同步带和第二转向轮;
12、所述第一同步带张紧件固定安装在下叉板尾端左侧,靠近所述中叉板头端位置的中叉板左侧安装有第一转向轮,所述第一同步带的一端连接所述第一同步带张紧件,所述第一同步带的另一端绕过所述第一转向轮后固定连接在靠近所述上叉板尾端的左侧底面上;
13、所述第二同步带张紧件固定安装在下叉板头端右侧,靠近所述中叉板尾端位置的中叉板右侧安装有第二转向轮,所述第二同步带的一端连接所述第二同步带张紧件,所述第二同步带的另一端绕过所述第二转向轮后固定连接在所述上叉板头端的右侧底面上。
14、另一方面,本实用新型提供一种叉车,其包括上述任一种所述的高精度定位的伸缩货叉。
15、相比现有技术,本实用新型的有益技术效果:
16、本实用新型通过在下叉板和中叉板之间、中叉板和上叉板之间增设导向机构,来消除叉体之间运动的间隙和定位,从而达到提高伸缩货叉定位精度的目的。
17、进一步地,取消传统伸缩货叉采用的三相异步减速电机与链条传动的驱动方式,本实用新型采用绝对值伺服电机与行星减速机,利用行星减速机与传动齿轮组件直接连接进行齿条驱动,能够进一步提升伸缩货叉定位精度。
18、进一步地,各级伸缩叉板间的导向取消原有尼龙块导向结构,采用导向轮组与直线导轮进行导向,同时负责中叉板和上叉板的导向轮组中的导向轮按照一定的规则顺序进行上下错位排列安装,能够进一步消除叉板之间运动的间隙和定位,从而达到提高伸缩货叉定位精度的目的。
技术特征:
1.一种高精度定位的伸缩货叉,其特征在于,包括下叉板、中叉板以及上叉板;所述下叉板位于最底层,下叉板上安装有提供中叉板、上叉板伸缩所需动力的驱动组件,所述中叉板安装在所述下叉板和所述上叉板之间,所述上叉板安装在中叉板上方,所述下叉板和中叉板之间沿其伸缩方向设置有第一导向机构,所述中叉板和上叉板之间沿其伸缩方向设置有第二导向机构。
2.根据权利要求1所述的高精度定位的伸缩货叉,其特征在于,所述第一导向机构和第二导向机构均由一系列的导向轮以及对应的导轨组成。
3.根据权利要求2所述的高精度定位的伸缩货叉,其特征在于,所述第一导向机构包括第一直线导轨、第二直线导轨、第一导向轮组和第二导向轮组,所述下叉板的左、右两侧边相对于其水平承托面分别垂直设置有第一直线导轨、第二直线导轨,所述中叉板的左、右侧面分别设置有包含一系列导向轮的第一导向轮组和第二导向轮组,第一导向轮组、第二导向轮组能够分别沿着第一直线导轨、第二直线导轨位移。
4.根据权利要求3所述的高精度定位的伸缩货叉,其特征在于,所述第二导向机构包括第三直线导轨、第四直线导轨、第三导向轮组和第四导向轮组,所述第三直线导轨、第四直线导轨设置在上叉板的底面两侧,所述第三直线导轨、第四直线导轨正下方的中叉板上对应设置有包含一系列导向轮的第三导向轮组和第四导向轮组,第三导向轮组、第四导向轮组能够分别沿着第三直线导轨、第四直线导轨位移。
5.根据权利要求4所述的高精度定位的伸缩货叉,其特征在于,所述第一导向轮组与第一直线导轨之间、第二导向轮组与第二直线导轨之间、第三导向轮组与第三直线导轨之间、第四导向轮组与第四直线导轨之间的导向接触面均为圆弧形线接触。
6.根据权利要求1或2或3或4或5所述的高精度定位的伸缩货叉,其特征在于,所述驱动组件包括用于提供动力的伺服驱动电机组件、用于动力传动的传动齿轮组件、用于连接和驱动上叉板进行同步运动的同步组件。
7.根据权利要求6所述的高精度定位的伸缩货叉,其特征在于,所述伺服驱动电机组件包括绝对值伺服电机与行星减速机,所述绝对值伺服电机连接行星减速机,所述行星减速机的输出端连接传动齿轮组件。
8.根据权利要求7所述的高精度定位的伸缩货叉,其特征在于,所述传动齿轮组件包括主动齿轮、两个从动齿轮以及设置在中叉板上的直线齿条,所述直线齿条设置在两个从动齿轮正上方的中叉板底面,直线齿条与两个从动齿轮的同步啮合,所述行星减速机的输出端连接主动齿轮,驱动主动齿轮转动,带动主动齿轮其两侧的两从动齿轮同步转动,两从动齿轮带动中叉板伸缩。
9.根据权利要求6所述的高精度定位的伸缩货叉,其特征在于,所述同步组件包括第一同步带张紧件、第一同步带、第一转向轮、第二同步带张紧件、第二同步带和第二转向轮;
10.一种叉车,其特征在于,包括权利要求1所述高精度定位的伸缩货叉。
技术总结
本技术提出一种高精度定位的伸缩货叉及叉车,包括下叉板、中叉板以及上叉板;所述下叉板位于最底层,下叉板上安装有提供中叉板、上叉板伸缩所需动力的驱动组件,所述中叉板安装在所述下叉板和所述上叉板之间,所述上叉板安装在中叉板上方,所述下叉板和中叉板之间沿其伸缩方向设置有第一导向机构,所述中叉板和上叉板之间沿其伸缩方向设置有第二导向机构。通过在下叉板和中叉板之间、中叉板和上叉板之间增设导向机构,来消除叉体之间运动的间隙和定位,从而达到提高伸缩货叉定位精度的目的。
技术研发人员:李灿,夏赞美
受保护的技术使用者:湖南蓝天智能物流装备有限公司
技术研发日:20230612
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!