一种货叉机构和搬运机器人的制作方法
本技术涉及搬运机器人,更具体地说,涉及一种货叉机构和搬运机器人。
背景技术:
1、自动导引运输车(automated guided vehicle,agv)技术是指在车间、物流中心、室内仓储、巡检、酒店服务等众多场景中广泛应用的车辆自动导引和自动搬运的技术。随着人工智能的不断发展,agv被越来越多地运用到生产型企业的自动搬运和物流仓储行业的自动搬运过程中。agv在实际的使用过程中可以承担很多功能,包括:搬运,堆垛,拆垛,牵引等动作。不同的车型擅长不同的任务。其中,堆垛涉及的车型是叉车agv,叉车agv堆垛过程中(即将托盘承载的整托货物几个一垛堆叠在一起),存在一个技术性难题,即叉车agv堆垛过程中存在的因货物堆叠的高度差别导致撞货、倒货、未放货的问题。
2、现有技术中,部分是利用3d激光感知技术,通过3d激光传感器获取对象物体三维空间点数据,每次放货前感知高度差异,自适应调整货叉举升高度,从而精准放货。具体实施过程为,将3d激光传感器集成到叉车agv车体上,在叉车agv放货前,用3d传感器获取货物轮廓,包括货物长度、宽度和高度等信息,并将信息反馈到叉车agv的调度系统,由调度系统调整左右距离和决定降叉高度,叉车agv执行。但是3d激光感知技术至少存在以下两点不足:1、成本高,高精度的3d传感器的生产成本很高,需要巨大的研发投入和原料成本,致使当前agv市场采用3d激光传感器的情形极少,仅为5%左右;2、稳定性差,相对于二维传感器,3d传感器的技术并不十分成熟,轮廓识别的误差是存在的;同时,由于3d激光传感器是装在叉车agv车体上的,需要和车身的电气、信号处理、软件结合在一起,增加了不稳定性,可能在扫描过程中出现扫不到的情况,或者误差较大的情况,受车体电气和软件系统的制约。另外,还可能受环境干扰,车间本身粉尘较大或者光照强烈时,3d传感器不能有效发挥作用。
技术实现思路
1、本实用新型提供一种货叉机构和搬运机器人,通过传感装置感测货物,用于辅助判断降叉高度,成本低且稳定性好。
2、为解决其技术问题所采用的技术方案是:
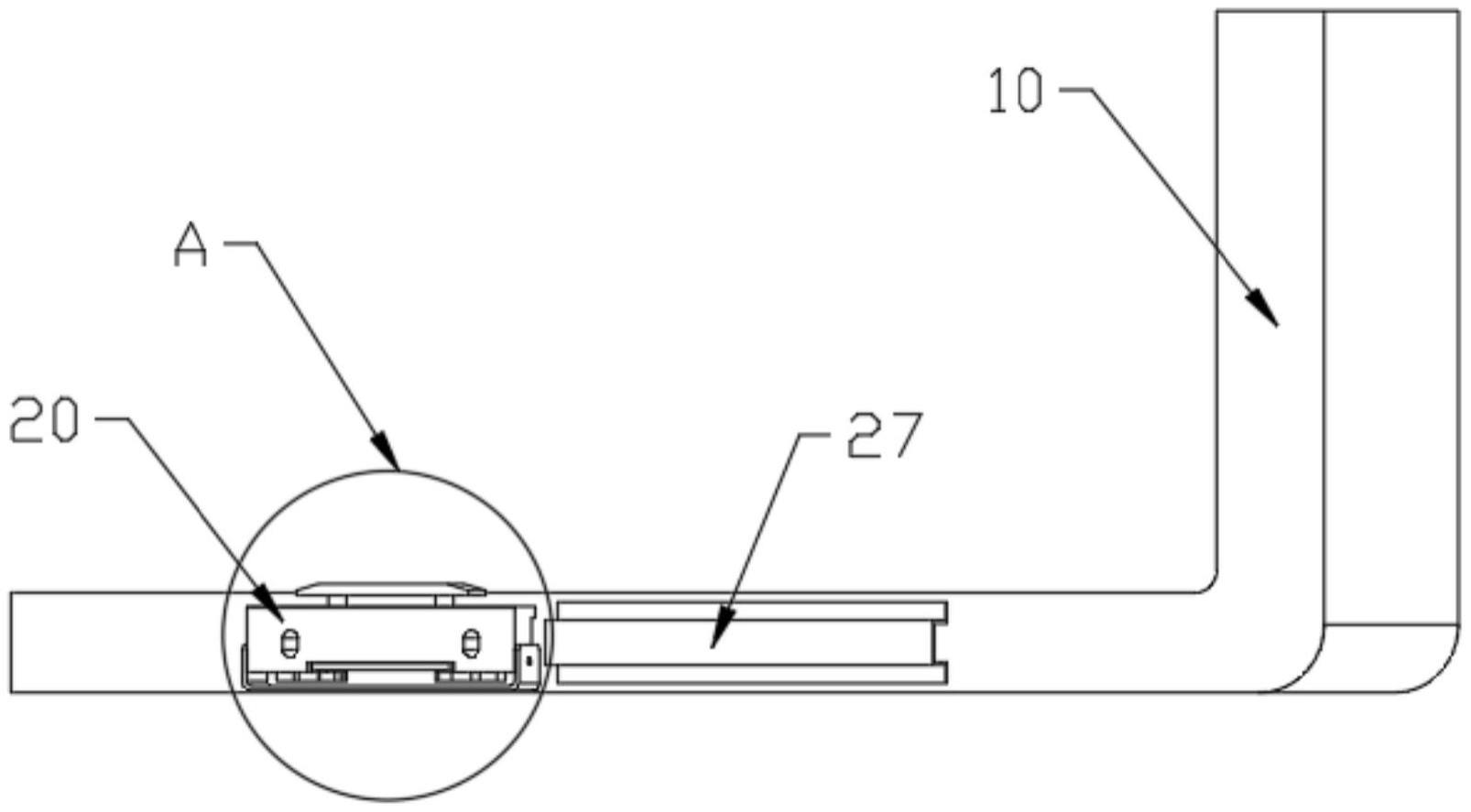
3、本实用新型提供一种货叉机构,所述货叉机构包括货叉和设置于所述货叉侧边的传感装置,所述传感装置用于感测放置于所述货叉上的货物;
4、所述传感装置包括固定块、弹性组件、顶部承重板和压力传感器;
5、所述固定块安装固定于所述货叉的侧边,所述弹性组件设置于所述固定块上;
6、所述弹性组件的一端连接所述顶部承重板,所述弹性组件的另一端连接所述压力传感器,在所述顶部承重板感测到来自所述货物的压力时,通过所述弹性组件将所述压力传递给所述压力传感器。
7、在一些实施例中,还包括底部承重板,所述底部承重板设置于所述弹性组件和所述压力传感器之间。
8、在一些实施例中,所述弹性组件包括两个弹性柱,所述弹性柱贯通安装于所述固定块,所述弹性柱的一端与所述顶部承重板连接固定,所述弹性柱的另一端与所述底部承重板连接固定。
9、在一些实施例中,所述压力传感器的数量为两个,两个所述压力传感器分别设置于所述底部承重板一表面的两侧,两个所述弹性柱分别设置于所述底部承重板另一表面的两侧,所述弹性柱和所述压力传感器对应设置。
10、在一些实施例中,还包括围护挡板,所述围护挡板安装固定于所述固定块,所述围护挡板包围所述压力传感器,所述压力传感器位于所述固定块和所述围护挡板围成的空间内。
11、在一些实施例中,还包括线槽,所述线槽与所述固定块安装固定于所述货叉的同一侧边。
12、在一些实施例中,所述传感装置的数量为两个,分别设置于所述货叉的两侧边。
13、本实用新型还提供一种搬运机器人,包括处理器和以上所述任意一项的货叉机构,所述压力传感器和所述处理器通信连接。
14、实施本实用新型实施例的技术方案,具有以下有益效果:区别于现有技术的情况,本实用新型实施例提供一种货叉机构,所述货叉机构包括货叉和设置于所述货叉侧边的传感装置,所述传感装置用于感测放置于所述货叉上的货物;所述传感装置包括固定块、弹性组件、顶部承重板和压力传感器;所述固定块安装固定于所述货叉的侧边,所述弹性组件设置于所述固定块上;所述弹性组件的一端连接所述顶部承重板,所述弹性组件的另一端连接所述压力传感器,在所述顶部承重板感测到来自所述货物的压力时,通过所述弹性组件将所述压力传递给所述压力传感器。通过将传感装置安装固定于货叉侧边,准确感测货物的压力,配合搬运机器人自动判断降叉高度,使货叉在合适的高度位置存放货物,避免掉货、带倒货或未放货,确保可持续自动存放货物,本传感装置生产成本低,使用稳定性强,受使用环境影响小。
技术特征:
1.一种货叉机构,其特征在于,所述货叉机构包括货叉和设置于所述货叉侧边的传感装置,所述传感装置用于感测放置于所述货叉上的货物;
2.根据权利要求1所述的货叉机构,其特征在于,还包括底部承重板,所述底部承重板设置于所述弹性组件和所述压力传感器之间。
3.根据权利要求2所述的货叉机构,其特征在于,所述弹性组件包括两个弹性柱,所述弹性柱贯通安装于所述固定块,所述弹性柱的一端与所述顶部承重板连接固定,所述弹性柱的另一端与所述底部承重板连接固定。
4.根据权利要求3所述的货叉机构,其特征在于,所述压力传感器的数量为两个,两个所述压力传感器分别设置于所述底部承重板一表面的两侧,两个所述弹性柱分别设置于所述底部承重板另一表面的两侧,所述弹性柱和所述压力传感器对应设置。
5.根据权利要求1-4任一项所述的货叉机构,其特征在于,还包括围护挡板,所述围护挡板安装固定于所述固定块,所述围护挡板包围所述压力传感器,所述压力传感器位于所述固定块和所述围护挡板围成的空间内。
6.根据权利要求1所述的货叉机构,其特征在于,还包括线槽,所述线槽与所述固定块安装固定于所述货叉的同一侧边。
7.根据权利要求1所述的货叉机构,其特征在于,所述传感装置的数量为两个,分别设置于所述货叉的两侧边。
8.一种搬运机器人,其特征在于,包括处理器和权利要求1-7任意一项所述的货叉机构,所述压力传感器和所述处理器通信连接。
技术总结
本技术涉及一种货叉机构和搬运机器人,货叉机构包括货叉和设置于货叉侧边的传感装置,传感装置用于感测放置于货叉上的货物;传感装置包括固定块、弹性组件、顶部承重板和压力传感器;固定块安装固定于货叉的侧边,弹性组件设置于固定块上;弹性组件的一端连接顶部承重板,弹性组件的另一端连接压力传感器,在顶部承重板感测到来自货物的压力时,通过弹性组件将压力传递给压力传感器。通过将传感装置安装固定于货叉侧边,准确感测货物的压力,配合搬运机器人自动判断降叉高度,使货叉在合适的高度位置存放货物,避免掉货、带倒货或未放货,确保可持续自动存放货物,本传感装置生产成本低,使用稳定性强,受使用环境影响小。
技术研发人员:杜楠枰
受保护的技术使用者:北京智华机器人科技有限公司
技术研发日:20230613
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!