一种石墨舟空轨运输车的双行走机构的制作方法
本技术涉及轨道运输系统,尤其涉及一种石墨舟空轨运输车的双行走机构。
背景技术:
1、石墨舟是一种由石墨材质制成的容器,常用作光伏行业的生产模具。由于石墨舟的体积一般较大,重量较重,而且容易因受外力作用而导致破损或开裂,因此,传统的人工运输方式存在着较大的隐患。而如果采用空轨运输车对石墨舟进行运送,则会因为石墨舟的长度较长,从而导致在轨道进行转弯时,需要提供较大转弯半径的轨道,对轨道设计带来较大的困难。而且,现有空轨运输车一般是配置一组行走机构,因此容易在弯道处,因为石墨舟在转弯过程中发生偏重,从而导致石墨舟从空轨运输车中脱落的情况,存在很大的安全问题。
2、因此,现有技术存在缺陷,需要改进。
技术实现思路
1、本实用新型的目的是克服现有技术的不足,提供一种石墨舟空轨运输车的双行走机构。
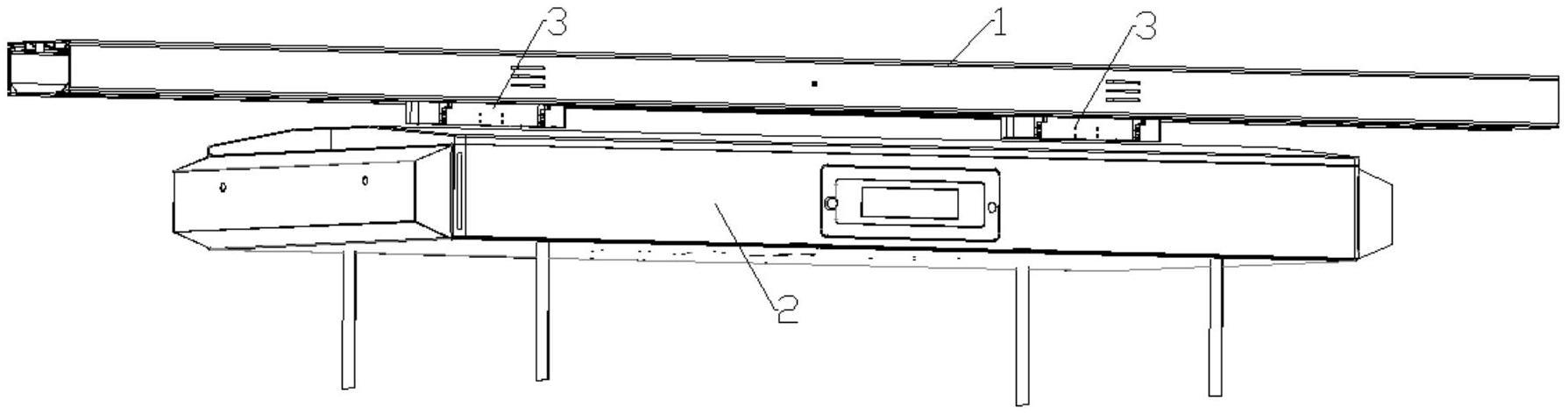
2、本实用新型的技术方案如下:提供一种石墨舟空轨运输车的双行走机构,包括:设置在高处的轨道、运输车主控箱体、以及设置在所述运输车主控箱体上的若干组行走机构,所述行走机构之间相互独立进行驱动,所述行走机构对称设置于运输车主控箱体上。
3、进一步地,所述行走机构的数量为2-4组,所述行走机构等距设置在运输车主控箱体上,外侧的两组行走机构设置于靠近运输车主控箱体边缘的位置。
4、进一步地,所述行走机构包括:与所述运输车主控箱体连接的行走轮支架、设于所述行走轮支架上的若干行走轮、以及设置于所述行走轮支架上的集电器,所述行走轮连接有驱动机构,所述轨道内侧设置有滑触线,所述集电器与滑触线接触并进行电性连接,所述集电器与运输车主控箱体内的控制系统电性连接,所述行走轮与轨道的底壁接触并沿着轨道进行滚动。
5、进一步地,所述行走轮支架上对称设置有若干导向轮,所述导向轮分别贴合与轨道的两侧,所述导向轮沿着轨道的延伸方向进行滚动。
6、进一步地,所述行走轮支架与运输车主控箱体之间通过转动副连接。
7、进一步地,所述轨道的截面为倒扣的c型结构。
8、进一步地,所述轨道的截面为i型结构。
9、采用上述方案,本实用新型通过设置多组相互独立的行走机构,从而在轨道转弯处,通过不同行走机构进行差动运动,以此保证转弯过程的平滑程度,有效减少转弯过程中发生震颤等情况,避免对石墨舟造成损坏。
技术特征:
1.一种石墨舟空轨运输车的双行走机构,其特征在于,包括:设置在高处的轨道、运输车主控箱体、以及设置在所述运输车主控箱体上的若干组行走机构,所述行走机构之间相互独立进行驱动,所述行走机构对称设置于运输车主控箱体上。
2.根据权利要求1所述的石墨舟空轨运输车的双行走机构,其特征在于,所述行走机构的数量为2-4组,所述行走机构等距设置在运输车主控箱体上,外侧的两组行走机构设置于靠近运输车主控箱体边缘的位置。
3.根据权利要求1所述的石墨舟空轨运输车的双行走机构,其特征在于,所述行走机构包括:与所述运输车主控箱体连接的行走轮支架、设于所述行走轮支架上的若干行走轮、以及设置于所述行走轮支架上的集电器,所述行走轮连接有驱动机构,所述轨道内侧设置有滑触线,所述集电器与滑触线接触并进行电性连接,所述集电器与运输车主控箱体内的控制系统电性连接,所述行走轮与轨道的底壁接触并沿着轨道进行滚动。
4.根据权利要求3所述的石墨舟空轨运输车的双行走机构,其特征在于,所述行走轮支架上对称设置有若干导向轮,所述导向轮分别贴合与轨道的两侧,所述导向轮沿着轨道的延伸方向进行滚动。
5.根据权利要求3所述的石墨舟空轨运输车的双行走机构,其特征在于,所述行走轮支架与运输车主控箱体之间通过转动副连接。
6.根据权利要求1所述的石墨舟空轨运输车的双行走机构,其特征在于,所述轨道的截面为倒扣的c型结构。
7.根据权利要求1所述的石墨舟空轨运输车的双行走机构,其特征在于,所述轨道的截面为i型结构。
技术总结
本技术公开一种石墨舟空轨运输车的双行走机构,包括:设置在高处的轨道、运输车主控箱体、以及设置在所述运输车主控箱体上的若干组行走机构,所述行走机构之间相互独立进行驱动,所述行走机构对称设置于运输车主控箱体上。本技术通过设置多组相互独立的行走机构,从而在轨道转弯处,通过不同行走机构进行差动运动,以此保证转弯过程的平滑程度,有效减少转弯过程中发生震颤等情况,避免对石墨舟造成损坏。
技术研发人员:高山,候长信,徐明月
受保护的技术使用者:深圳市宇钧科技有限责任公司
技术研发日:20230615
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!