压料式釜底灌装机的制作方法
本技术涉及云台领域,尤其是压料式釜底灌装机。
背景技术:
1、反应釜内的物料在加工完毕之后,需要将物料分别灌注到数个罐体内。但是现有的物料灌装到罐体内之后,无法将物料压紧,因此可能会影响后续其他物料的填装。
技术实现思路
1、为了克服现有的罐体灌装无法按压物料的不足,本实用新型提供了压料式釜底灌装机。
2、本实用新型解决其技术问题所采用的技术方案是:一种压料式釜底灌装机,包括存料箱、出料头、阀门、罐体夹具、夹具水平移动机构、ccd相机、压料机构、罐体搬运机构、罐体输出机构,所述存料箱底部设有出料头,出料头上安装有阀门,存料箱下方设有夹具水平移动机构,夹具水平移动机构上安装有罐体夹具,ccd相机、压料机构、罐体搬运机构依次位于夹具水平移动机构上方,罐体输出机构位于罐体搬运机构下方。
3、根据本实用新型的另一个实施例,进一步包括所述罐体夹具由底座、夹板、夹板推动气缸组成,底座上设有用于放置罐体的定位槽,底座上固定有两个相对的夹板推动气缸,定位槽位于两个夹板推动气缸之间,夹板推动气缸的活塞杆上固定有夹板。
4、根据本实用新型的另一个实施例,进一步包括所述夹具水平移动机构为水平直线模组,水平直线模组的滑座固定在底座上。
5、根据本实用新型的另一个实施例,进一步包括所述压料机构由压板和压板升降机构组成,压板升降机构的活塞杆上固定有压板。
6、根据本实用新型的另一个实施例,进一步包括所述板升降机构为单杆动力缸。
7、根据本实用新型的另一个实施例,进一步包括所述压板为陶瓷板体。
8、根据本实用新型的另一个实施例,进一步包括所述罐体搬运机构由二轴机械手、连接架、夹爪组成,二轴机械手上安装有连接架,连接架上安装有两个夹爪。
9、根据本实用新型的另一个实施例,进一步包括所述罐体输出机构为皮带输送机。
10、本实用新型的有益效果是,该实用新型通过存料箱配合阀门来定量送料到罐体内。通过罐体夹具及夹具水平移动机构来驱使罐体水平移动至不同工位。通过压料机构将罐体内的物料压紧。通过罐体搬运机构配合罐体输出机构将罐体移至其他工位。
技术特征:
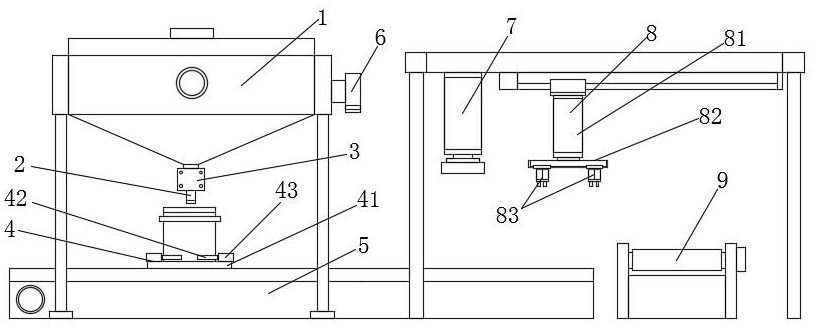
1.一种压料式釜底灌装机,其特征是,包括存料箱(1)、出料头(2)、阀门(3)、罐体夹具(4)、夹具水平移动机构(5)、ccd相机(6)、压料机构(7)、罐体搬运机构(8)、罐体输出机构(9),所述存料箱(1)底部设有出料头(2),出料头(2)上安装有阀门(3),存料箱(1)下方设有夹具水平移动机构(5),夹具水平移动机构(5)上安装有罐体夹具(4),ccd相机(6)、压料机构(7)、罐体搬运机构(8)依次位于夹具水平移动机构(5)上方,罐体输出机构(9)位于罐体搬运机构(8)下方。
2.根据权利要求1所述的压料式釜底灌装机,其特征是,所述罐体夹具(4)由底座(41)、夹板(42)、夹板推动气缸(43)组成,底座(41)上设有用于放置罐体的定位槽,底座(41)上固定有两个相对的夹板推动气缸(43),定位槽位于两个夹板推动气缸(43)之间,夹板推动气缸(43)的活塞杆上固定有夹板(42)。
3.根据权利要求2所述的压料式釜底灌装机,其特征是,所述夹具水平移动机构(5)为水平直线模组,水平直线模组的滑座固定在底座(41)上。
4.根据权利要求1所述的压料式釜底灌装机,其特征是,所述压料机构(7)由压板和压板升降机构组成,压板升降机构的活塞杆上固定有压板。
5.根据权利要求4所述的压料式釜底灌装机,其特征是,所述板升降机构为单杆动力缸。
6.根据权利要求4所述的压料式釜底灌装机,其特征是,所述压板为陶瓷板体。
7.根据权利要求1所述的压料式釜底灌装机,其特征是,所述罐体搬运机构(8)由二轴机械手(81)、连接架(82)、夹爪(83)组成,二轴机械手(81)上安装有连接架(82),连接架(82)上安装有两个夹爪(83)。
8.根据权利要求1所述的压料式釜底灌装机,其特征是,所述罐体输出机构(9)为皮带输送机。
技术总结
本技术涉及灌装机领域,尤其是压料式釜底灌装机。该灌装机包括存料箱、出料头、阀门、罐体夹具、夹具水平移动机构、CCD相机、压料机构、罐体搬运机构、罐体输出机构,所述存料箱底部设有出料头,出料头上安装有阀门,存料箱下方设有夹具水平移动机构,夹具水平移动机构上安装有罐体夹具,CCD相机、压料机构、罐体搬运机构依次位于夹具水平移动机构上方,罐体输出机构位于罐体搬运机构下方。该技术通过存料箱配合阀门来定量送料到罐体内。通过罐体夹具及夹具水平移动机构来驱使罐体水平移动至不同工位。通过压料机构将罐体内的物料压紧。通过罐体搬运机构配合罐体输出机构将罐体移至其他工位。
技术研发人员:范湘东
受保护的技术使用者:江苏中力自动化科技有限公司
技术研发日:20230625
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!