一种仓库运送机器人
本技术涉及运输工具,尤其涉及一种仓库运送机器人。
背景技术:
1、物流是为了满足客户的需要,以最低的成本,通过运输、配送等方式,实现商品的产地到商品的消费地所进行的计划、实施和管理的全过程。在物流仓储中,会通过机器人运送货物到指定货架,而后需要人员将货物搬到货架上,位置较高时,人员搬动比较费力。
2、在公示号为cn106181959a中公开的一种运送机器人,虽然,该运送机器人不仅能在平路上行走,而且也能在不平的路面上行走,以及能完成上下台阶或楼梯等操作,从而能更好地完成对人或物的运输。
3、但是,该运送机器人,具有以下的缺点:
4、(1)在人员将仓储货物搬到货架时,机器人不容易将货物进行抬升,人员将货物搬到货架高处时较为费力;
5、(2)在运输货物过程中,不容易对货物进行缓冲减震,遇到不平整路面颠簸容易导致易碎物品损坏,造成损失。
技术实现思路
1、(一)解决的技术问题
2、实用新型解决的技术问题是提供一种实用性较高,并且能够通过简单的操作,结构较为简单的一种仓库运送机器人,解决了上述背景技术中提出的机器人不容易将货物进行抬升以及不容易对货物进行缓冲减震的问题。
3、(二)技术方案
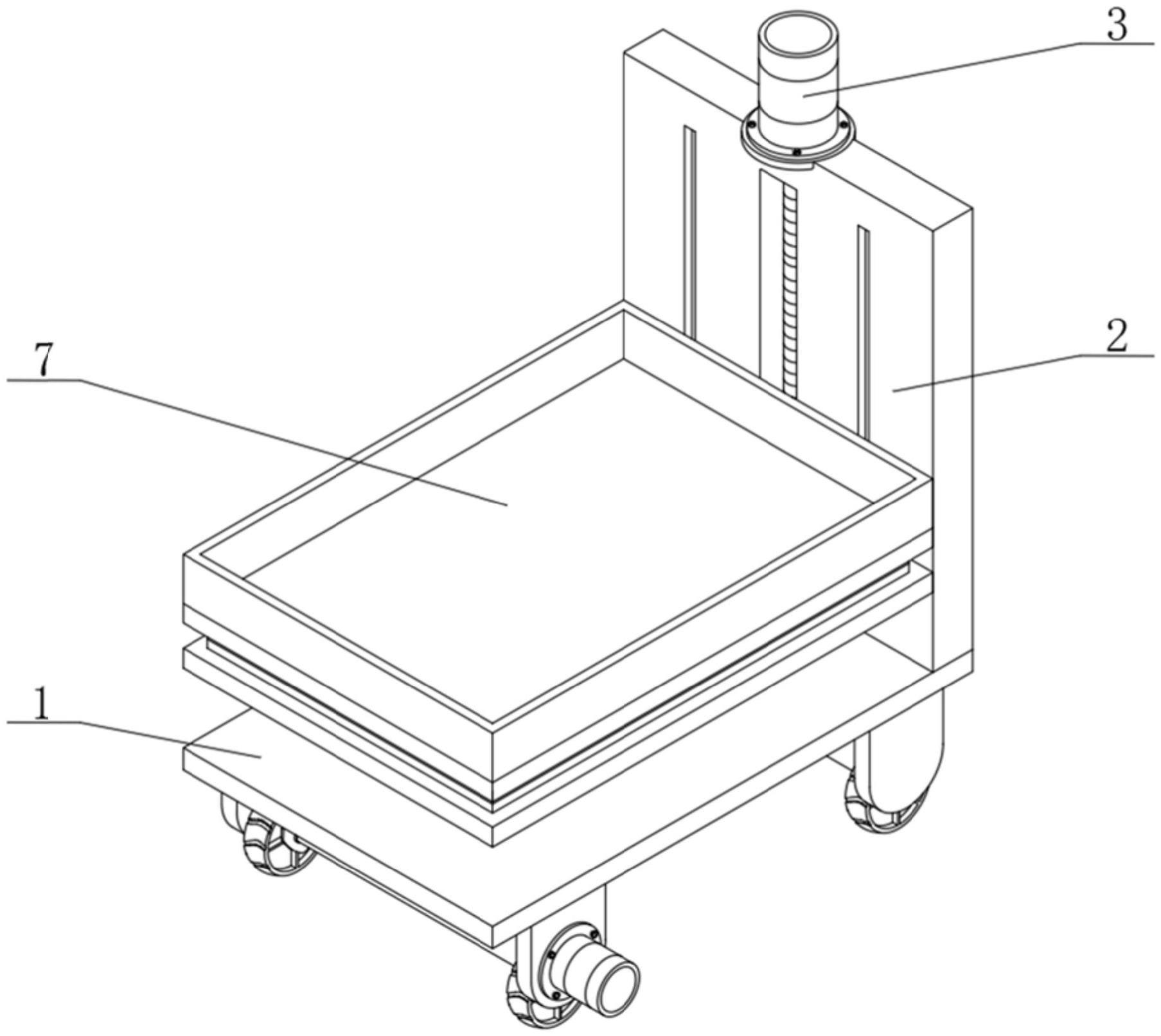
4、为实现以上目的,本实用新型通过以下技术方案予以实现:一种仓库运送机器人,包括底座,底座顶面的一侧固定连接有竖板,所述竖板的顶面通过螺丝螺纹连接有a电机箱,所述a电机箱的内部固定连接有升降组件,所述升降组件的一侧固定连接有升降板,所述升降板的顶面固定连接有缓冲组件,所述缓冲组件的顶面固定连接有运送架,所述底座的底面固定连接有固定块,所述固定块的一侧固定连接有驱动组件,所述竖板的一侧固定连接有机器人主体,所述机器人主体的正面固定连接有控制模块。
5、可选的,所述升降组件包括固定于a电机箱内部的a伺服电机,所述a伺服电机的输出端花键连接有a传动杆,所述a传动杆的底部固定连接有螺纹丝杆,所述螺纹丝杆的表面螺纹连接有升降块,所述a伺服电机与控制模块电控连接。
6、可选的,所述竖板表面的两侧均开设有滑动槽,所述升降板的一侧固定连接有两组滑动块,所述滑动块滑动连接有滑动槽的内部。
7、可选的,所述缓冲组件包括固定于升降板顶面的a橡胶垫,所述a橡胶垫的顶面固定连接有夹板,所述夹板的顶面固定连接有b橡胶垫。
8、可选的,所述驱动组件包括固定于固定块一侧的b电机箱,所述b电机箱的内部固定连接有b伺服电机,所述b伺服电机的输出端花键连接有b传动杆,所述b传动杆的一端固定连接有滚轮,所述b伺服电机与控制模块电控连接。
9、可选的,所述竖板表面的中部开设有滑槽,所述升降块滑动连接于滑槽的内部。
10、(三)有益效果
11、本实用新型提供了一种仓库运送机器人,具备以下有益效果:
12、1、该仓库运送机器人,通过升降组件的设置,在使用时,将货物放置于运送架内,在搬运时,连通外部电源使得a伺服电机通电后,带动a传动杆转动,进而带动螺纹丝杆转动,使得升降块带动升降板升降,从而达到了方便人员将货物搬运到不同高度的货架上的效果,节省了人力,便于人员使用。
13、2、该仓库运送机器人,通过缓冲组件的设置,在运送时,路面不平整造成颠簸,a橡胶垫和b橡胶垫同步产生形变,将震动力进行缓冲,避免震动导致货物损坏,造成损失。
技术特征:
1.一种仓库运送机器人,包括底座(1),其特征在于:底座(1)顶面的一侧固定连接有竖板(2),所述竖板(2)的顶面通过螺丝螺纹连接有a电机箱(3),所述a电机箱(3)的内部固定连接有升降组件(4),所述升降组件(4)的一侧固定连接有升降板(5),所述升降板(5)的顶面固定连接有缓冲组件(6),所述缓冲组件(6)的顶面固定连接有运送架(7),所述底座(1)的底面固定连接有固定块(8),所述固定块(8)的一侧固定连接有驱动组件(9),所述竖板(2)的一侧固定连接有机器人主体(10),所述机器人主体(10)的正面固定连接有控制模块(11)。
2.根据权利要求1所述的一种仓库运送机器人,其特征在于:所述升降组件(4)包括固定于a电机箱(3)内部的a伺服电机(401),所述a伺服电机(401)的输出端花键连接有a传动杆(402),所述a传动杆(402)的底部固定连接有螺纹丝杆(403),所述螺纹丝杆(403)的表面螺纹连接有升降块(404),所述a伺服电机(401)与控制模块(11)电控连接。
3.根据权利要求1所述的一种仓库运送机器人,其特征在于:所述竖板(2)表面的两侧均开设有滑动槽,所述升降板(5)的一侧固定连接有两组滑动块,所述滑动块滑动连接有滑动槽的内部。
4.根据权利要求1所述的一种仓库运送机器人,其特征在于:所述缓冲组件(6)包括固定于升降板(5)顶面的a橡胶垫(601),所述a橡胶垫(601)的顶面固定连接有夹板(602),所述夹板(602)的顶面固定连接有b橡胶垫(603)。
5.根据权利要求1所述的一种仓库运送机器人,其特征在于:所述驱动组件(9)包括固定于固定块(8)一侧的b电机箱(901),所述b电机箱(901)的内部固定连接有b伺服电机(902),所述b伺服电机(902)的输出端花键连接有b传动杆(903),所述b传动杆(903)的一端固定连接有滚轮(904),所述b伺服电机(902)与控制模块(11)电控连接。
6.根据权利要求2所述的一种仓库运送机器人,其特征在于:所述竖板(2)表面的中部开设有滑槽,所述升降块(404)滑动连接于滑槽的内部。
技术总结
本技术涉及运输工具技术领域,且公开了一种仓库运送机器人,包括底座,底座顶面的一侧固定连接有竖板,所述竖板的顶面通过螺丝螺纹连接有A电机箱,所述A电机箱的内部固定连接有升降组件,所述升降组件的一侧固定连接有升降板,所述升降板的顶面固定连接有缓冲组件,所述缓冲组件的顶面固定连接有运送架,所述底座的底面固定连接有固定块。该仓库运送机器人,通过升降组件的设置,在使用时,将货物放置于运送架内,在搬运时,连通外部电源使得A伺服电机通电后,带动A传动杆转动,进而带动螺纹丝杆转动,使得升降块带动升降板升降,从而达到了方便人员将货物搬运到不同高度的货架上的效果,节省了人力,便于人员使用。
技术研发人员:黄慧静,李帅,梁静萍,曹嘉琳,黄萍
受保护的技术使用者:广西科技师范学院
技术研发日:20230625
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!