双工位中心距可变的堆垛机的制作方法
申请涉及仓储自动化设备领域,尤其涉及一种双工位中心距可变的堆垛机。
背景技术:
1、目前堆垛机的应用场景越来越广泛,对堆垛机的载货要求也越来越高。堆垛机多数是单工位定点进行插取货物,然后再定点堆垛于平台上,导致堆垛机堆垛货物效率不高。
技术实现思路
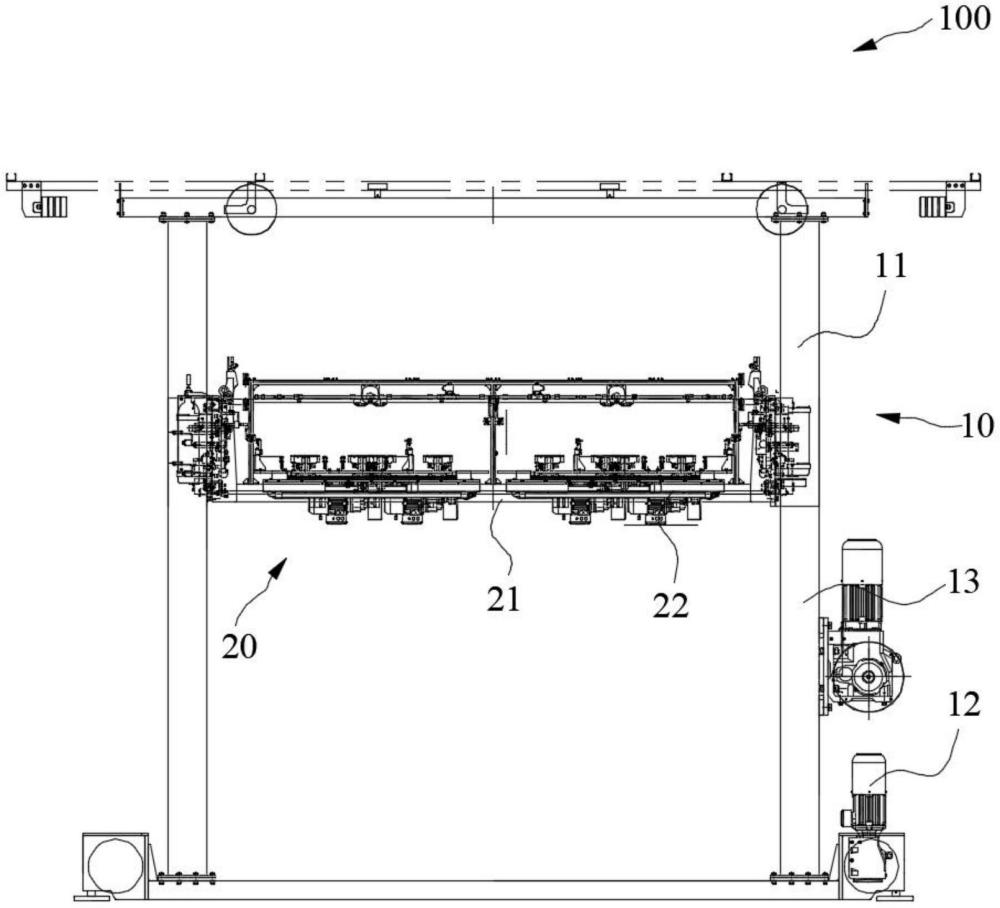
1、本申请实施例提供一种双工位中心距可变的堆垛机,其中,所述双工位中心距可变的堆垛机包括机架和升降平台,所述升降平台包括升降主体和两个并排间隔设置的叉车工位,所述升降主体在所述机架上可上下升降,每一所述叉车工位包括固定于所述升降主体的横向导轨和滑动设置于所述横向导轨的纵向导轨,以及滑动设置于所述纵向导轨的货叉,两个所述叉车工位上的货叉沿纵向同步滑动用于同时插取两组堆叠货物,两个所述叉车工位上的货叉分别在沿两个横向导轨滑动调整位置用于适配两组堆叠货物的中心距。
2、进一步地,所述横向导轨包括前导轨和与所述前导轨平行的后导轨,所述纵向导轨的两端分别滑动连接于所述前导轨和后导轨。
3、进一步地,所述叉车工位还包括配置于所述横向导轨上的第一动力机和第一传动带,所述第一动力机经所述第一传动带带动所述纵向导轨沿所述横向导轨滑动。
4、进一步地,所述叉车工位还包括配置于所述横向导轨上的变距编码器,所述第一动力机为电机,所述变距编码器与所述第一动力机电连接,用于获取所述第一动力机驱动所述纵向导轨的横向滑动位移,并将该横向滑动位置转换为数字信号发送至终端。
5、进一步地,所述纵向导轨包括左导轨和与所述左导轨平行且保持相对不同的右导轨,所述左导轨的两端分别滑动连接所述前导轨和所述后导轨,所述右导轨的两端分别滑动连接所述前导轨和所述后导轨,所述货叉包括两个指叉,两个所述指叉可分别沿左导轨和右导轨同步纵向滑动。
6、进一步地,所述叉车工位还包括插板支架、第二动力机和第二传动带,所述插板支架固定连接两个所述指叉,所述第二动力机配置于所述插板支架上,并经所述第二传动带连接所述左导轨与所述左导轨中的至少一者,以带动所述指叉纵向滑动。
7、进一步地,所述叉车工位还包括配置于所述插板支架上的纵向编码器,所述第二动力机为电机,所述纵向编码器与所述第二动力机电连接,用于获取所述第二动力机驱动所述指叉沿纵向滑动的位移,并将该纵向滑动位移转换成数字信号发送至终端。
8、进一步地,所述纵向导轨上设置有中位开关,所述中位开关用于感应所述货叉的复位。
9、进一步地,所述货叉上设置有第一边距到位检测开关,所述横向导轨上设置有第二边距到位检测开关,在所述货叉伸出状态下,所述第一边距到位检测开关与第二边距到位检测开关相感应,以感应所述货叉的横向位移。
10、进一步地,所述机架设有动力系统和传动系统,所述动力系统经所述传动系统驱动所述升降平台升降。
11、本申请实施例提供的双工位中心距可变的的堆垛机,通过所述升降平台设置两个并排间隔设置的叉车工位,每个叉车工位设置可沿横向导轨移动货叉,从而可以利用双工位同时进行堆垛工作,并且双工位上的货叉中心距可调,以应对不同距离的堆垛需求,提高了堆垛效率。
技术特征:
1.一种双工位中心距可变的堆垛机,其特征在于,所述双工位中心距可变的堆垛机包括机架和升降平台,所述升降平台包括升降主体和两个并排间隔设置的叉车工位,所述升降主体在所述机架上可上下升降,每一所述叉车工位包括固定于所述升降主体的横向导轨和滑动设置于所述横向导轨的纵向导轨,以及滑动设置于所述纵向导轨的货叉,两个所述叉车工位上的货叉沿纵向同步滑动用于同时插取两组堆叠货物,两个所述叉车工位上的货叉分别在沿两个横向导轨滑动调整位置用于适配两组堆叠货物的中心距。
2.根据权利要求1所述的堆垛机,其特征在于,所述横向导轨包括前导轨和与所述前导轨平行的后导轨,所述纵向导轨的两端分别滑动连接于所述前导轨和后导轨。
3.根据权利要求2所述的堆垛机,其特征在于,所述叉车工位还包括配置于所述横向导轨上的第一动力机和第一传动带,所述第一动力机经所述第一传动带带动所述纵向导轨沿所述横向导轨滑动。
4.根据权利要求3所述的堆垛机,其特征在于,所述叉车工位还包括配置于所述横向导轨上的变距编码器,所述第一动力机为电机,所述变距编码器与所述第一动力机电连接,用于获取所述第一动力机驱动所述纵向导轨的横向滑动位移,并将该横向滑动位置转换为数字信号发送至终端。
5.根据权利要求2所述的堆垛机,其特征在于,所述纵向导轨包括左导轨和与所述左导轨平行且保持相对不同的右导轨,所述左导轨的两端分别滑动连接所述前导轨和所述后导轨,所述右导轨的两端分别滑动连接所述前导轨和所述后导轨,所述货叉包括两个指叉,两个所述指叉可分别沿左导轨和右导轨同步纵向滑动。
6.根据权利要求5所述的堆垛机,其特征在于,所述叉车工位还包括插板支架、第二动力机和第二传动带,所述插板支架固定连接两个所述指叉,所述第二动力机配置于所述插板支架上,并经所述第二传动带连接所述左导轨与所述左导轨中的至少一者,以带动所述指叉纵向滑动。
7.根据权利要求6所述的堆垛机,其特征在于,所述叉车工位还包括配置于所述插板支架上的纵向编码器,所述第二动力机为电机,所述纵向编码器与所述第二动力机电连接,用于获取所述第二动力机驱动所述指叉沿纵向滑动的位移,并将该纵向滑动位移转换成数字信号发送至终端。
8.根据权利要求1所述的堆垛机,其特征在于,所述纵向导轨上设置有中位开关,所述中位开关用于感应所述货叉的复位。
9.根据权利要求1所述的堆垛机,其特征在于,所述货叉上设置有第一边距到位检测开关,所述横向导轨上设置有第二边距到位检测开关,在所述货叉伸出状态下,所述第一边距到位检测开关与第二边距到位检测开关相感应,以感应所述货叉的横向位移。
10.根据权利要求1所述的堆垛机,其特征在于,所述机架设有动力系统和传动系统,所述动力系统经所述传动系统驱动所述升降平台升降。
技术总结
本申请公开了一种双工位中心距可变的堆垛机,所述双工位中心距可变的堆垛机包括机架和升降平台,所述升降平台包括升降主体和两个并排间隔设置的叉车工位,每一所述叉车工位包括固定于所述升降主体的横向导轨和滑动设置于所述横向导轨的纵向导轨,以及滑动设置于所述纵向导轨的货叉,两个所述叉车工位上的货叉分别在沿两个横向导轨滑动调整位置用于适配两组堆叠货物的中心距所述升降平台设置两个并排间隔设置的叉车工位,每个叉车工位设置可沿横向导轨移动货叉,从而可以利用双工位同时进行堆垛工作,并且双工位上的货叉中心距可调,以应对不同距离的堆垛需求,提高了堆垛效率。
技术研发人员:邵健锋,郭冬明,吴剑,宁吉安,杨星宇
受保护的技术使用者:深圳市今天国际智能机器人有限公司
技术研发日:20230625
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!