一种简易搬运装置的制作方法
本技术涉及工件转运、搬运设备,具体涉及一种简易搬运装置。
背景技术:
1、在工件的加工过程中,为了提高工件的加工效率,加快产线生产节拍和提高设备利用率,现有的工件设备一般都会设置有多个连续加工工位,并在多个加工工位之间对应的设置一组或多组用来输送工件的工件搬运装置,以用来实现工件在各个加工工位之间的转移、搬运。
2、目前,在工件加工领域,由于加工设备上所设置的两个或多个加工工位一般都位于同一水平内,常见的工件搬运装置大多需要同时具备水平移动功能和竖直移动功能才能够实现工件在两个加工工位之间的搬运动作,即现有的工件搬运装置大多需要同时具备水平驱动机构和竖直驱动机构这两套驱动机构才能够实现工件在不同加工工位之间的转移。
3、因此在实际生产过程中,现有的工件搬运装置存在结构复杂、零部件繁多的问题,且在此基础上,其不仅仅会加大整个工件搬运装置的生产成本,还会降低整个工件搬运装置的装配效率。
技术实现思路
1、本实用新型解决的技术问题是提供一种结构简单的简易搬运装置,以降低整个工件搬运装置的生产成本,提高整个工件搬运装置的生产效率、装配效率。
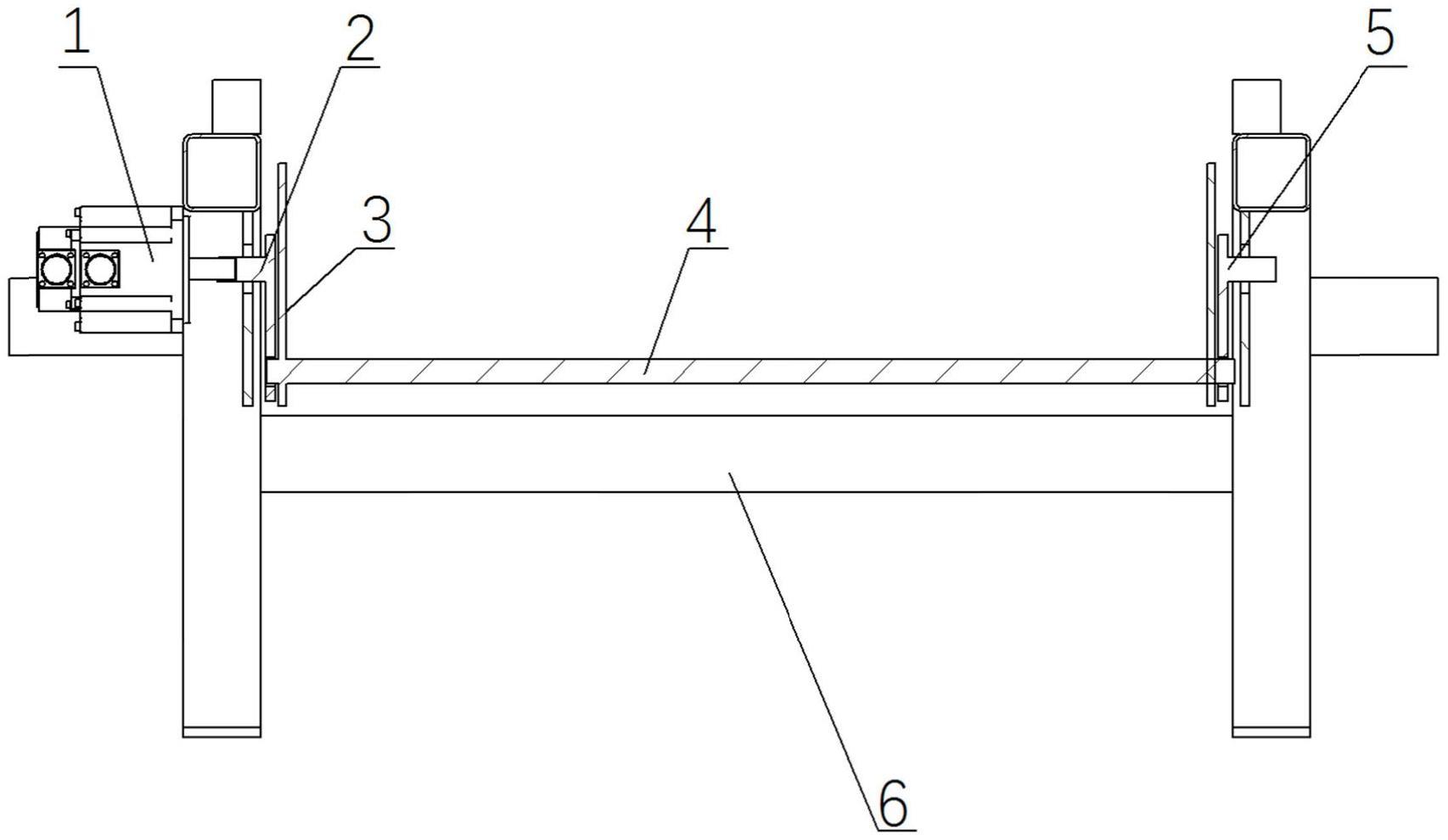
2、为了解决上述技术问题,本实用新型所提供的技术方案为:一种简易搬运装置,其包括搬运支架,搬运支架的一侧转动安装有两根连杆一,两根连杆一沿水平方向平行设置,且其中一根连杆一传动连接有旋转驱动机构;搬运支架的另一侧转动安装有两根连杆二,两根连杆二均与连杆一平行,两根连杆二与两根连杆一一一相对设置,所有的连杆一和所有的连杆二之间共同铰接有送料架。这时本实用新型中的两根连杆一和送料架、搬运支架能构成一个由旋转驱动机构进行驱使的平行四连杆机构,且此时在该平行四连杆机构的作用下,本实用新型中的送料架能够在竖直平面内进行转动,并带动送料架上所放置的工件同时进行水平移动和竖直移动,以实现对应的工件搬运动作,无需设置多个动力源。
3、进一步地,送料架包括送料叉,送料叉的下部设置有两根连接轴,每根连接轴的两端都分别与对应的连杆一、连杆二连接,并均在连杆一的作用下进行转动。
4、进一步地,送料叉的上端设置有放料槽,并通过放料槽对所搬运的工件进行放置。
5、进一步地,放料槽为v形槽,且其能够适用于多种尺寸的工件。
6、进一步地,连接轴上设置有至少两个送料叉,且具体地送料叉数量可根据其所搬运工件的长度灵活选择。
7、进一步地,旋转驱动机构包括旋转驱动电机,旋转驱动电机的输出端与对应的连杆一传动连接,并带动该连杆一进行对应方向的转动。
8、进一步地,连杆一的端部设置有电机连接部,电机连接部与旋转驱动电机的输出端固定连接,且两者的连接方式既可以采用键连接结构,也可采用插接结构、联轴器等其他结构。
9、从以上技术方案可以看出,本实用新型具有以下优点:由于本实用新型中的两根连杆一和送料架、搬运支架能构成一个由旋转驱动机构进行驱使的平行四连杆机构,在采用本实用新型进行工件的搬运时,本实用新型可直接在一个动力源的作用下带动送料架上所放置的工件同时进行水平移动和竖直移动,以实现对应的工件搬运动作,无需设置多个动力源。
技术特征:
1.一种简易搬运装置,包括搬运支架;其特征在于,搬运支架的一侧转动安装有两根连杆一,两根连杆一沿水平方向平行设置,且其中一根连杆一传动连接有旋转驱动机构;搬运支架的另一侧转动安装有两根连杆二,两根连杆二均与连杆一平行,两根连杆二与两根连杆一一一相对设置,所有的连杆一和所有的连杆二之间共同铰接有送料架。
2.根据权利要求1所述的简易搬运装置,其特征在于,送料架包括送料叉,送料叉的下部设置有两根连接轴,每根连接轴的两端都分别与对应的连杆一、连杆二连接。
3.根据权利要求2所述的简易搬运装置,其特征在于,送料叉的上端设置有放料槽。
4.根据权利要求3所述的简易搬运装置,其特征在于,放料槽为v形槽。
5.根据权利要求2或3或4所述的简易搬运装置,其特征在于,连接轴上设置有至少两个送料叉。
6.根据权利要求1所述的简易搬运装置,其特征在于,旋转驱动机构包括旋转驱动电机,旋转驱动电机的输出端与对应的连杆一传动连接。
7.根据权利要求6所述的简易搬运装置,其特征在于,连杆一的端部设置有电机连接部,电机连接部与旋转驱动电机的输出端固定连接。
技术总结
本技术提供一种简易搬运装置,涉及工件转运、搬运设备技术领域,其包括搬运支架,搬运支架的一侧转动安装有两根连杆一,两根连杆一沿水平方向平行设置,且其中一根连杆一传动连接有旋转驱动机构;搬运支架的另一侧转动安装有两根连杆二,两根连杆二均与连杆一平行,两根连杆二与两根连杆一一一相对设置,所有的连杆一和所有的连杆二之间共同铰接有送料架。本技术中的两根连杆一和送料架、搬运支架能构成一个由旋转驱动机构进行驱使的平行四连杆机构,且此时在该平行四连杆机构的作用下,本技术仅需一个动力源即可带动送料架上所放置的工件同时进行水平移动和竖直移动,无需设置多个动力源。
技术研发人员:万燕,赵合玲,荣国亚
受保护的技术使用者:苏州森峰智能装备有限公司
技术研发日:20230629
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!