一种带有加固结构的打包臂的制作方法
本技术涉及机器人打包臂,具体为一种带有加固结构的打包臂。
背景技术:
1、机器人打包臂由上盘体、通过螺栓与上盘体相连接的下盘体、设置在上盘体和下盘体之间的石棉垫组成的吸盘,在上盘体和下盘体之间设置有真空仓,真空仓通过真空管与真空泵相连,吸盘下盘体的盘面上开有许多真空孔,上盘体通过螺栓与十字架相连,十字型架又通过螺栓与锥型架相连接,在螺栓上套有弹簧,机器人打包臂整体加固调节不易,导致机器人打包臂倾斜。
2、市场上的机器人打包臂整体采用焊接方式,导致机器人打包臂设备线安装不易,机器人打包臂内置连接线采用外接方式,造成机器人打包臂活动故障,机器人打包臂连接端线活动时,容易脱落。
技术实现思路
1、本实用新型的目的在于提供一种带有加固结构的打包臂,以解决上述背景技术中提出的市场上的问题。
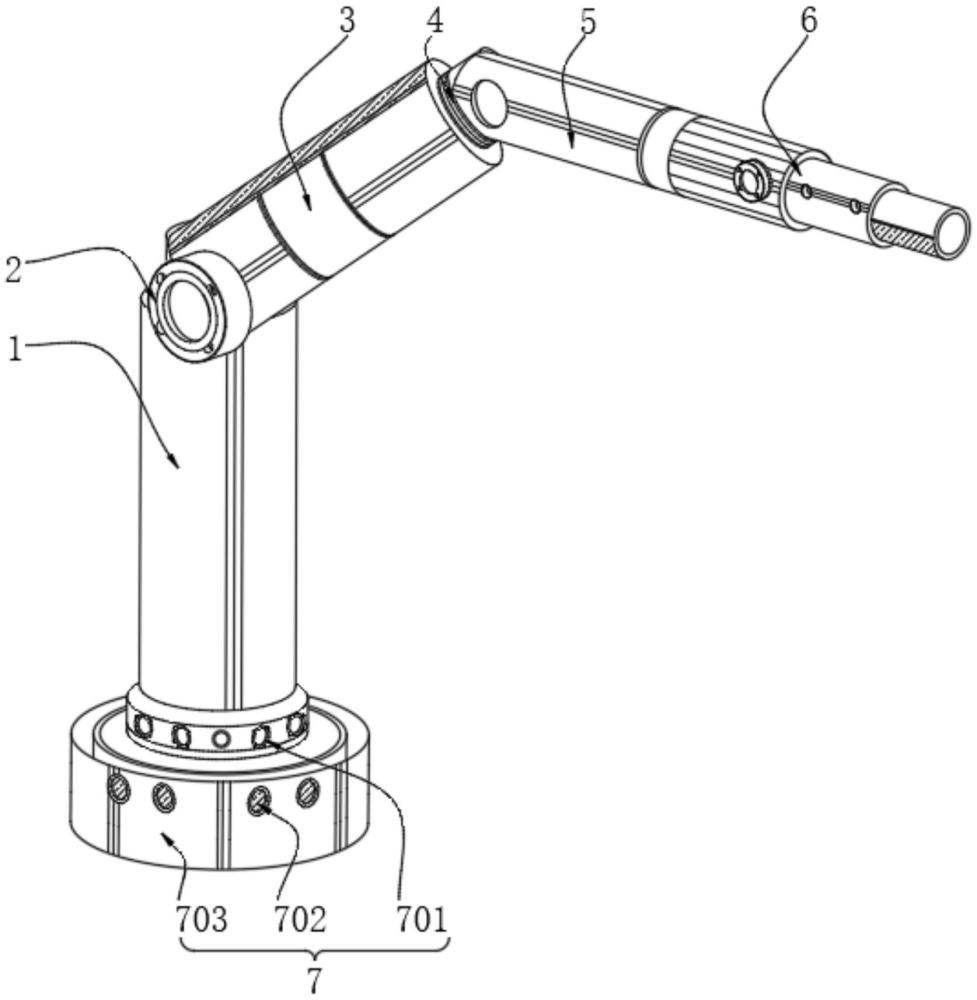
2、为实现上述目的,本实用新型提供如下技术方案:一种带有加固结构的打包臂,包括打包机器人臂和活动轴盘,所述打包机器人臂的上方安装有机械臂轴,且机械臂轴的上方设置有打包臂内置防护机构,所述活动轴盘安装于打包臂内置防护机构的一侧,所述活动轴盘的一侧设置有打包臂连接臂,且打包臂连接臂的一侧安装有活动防护机构,所述打包机器人臂的底端设置有基座加固机构,所述基座加固机构包括基座环、贯穿加固轴和基座,且基座的四周安装有贯穿加固轴,所述基座的顶端设置有基座环。
3、进一步的,所述打包机器人臂与机械臂轴之间为活动连接,且机械臂轴与打包臂内置防护机构之间为轴承连接。
4、进一步的,所述活动轴盘与打包臂连接臂之间为活动连接,且打包臂连接臂的内部贯穿有活动防护机构。
5、进一步的,所述基座环与贯穿加固轴之间为螺纹连接,且基座环通过贯穿加固轴与基座构成卡扣结构。
6、进一步的,所述打包臂内置防护机构包括封装罩和嵌入柱,且封装罩的下方安装有嵌入柱。
7、进一步的,所述封装罩与嵌入柱之间为螺纹连接,且嵌入柱设置有七个。
8、进一步的,所述活动防护机构包括软连接罩和贯穿柱,且软连接罩的一侧安装有贯穿柱。
9、进一步的,所述软连接罩与贯穿柱之间为螺纹连接,且软连接罩通过贯穿柱与打包臂连接臂构成折叠结构。
10、与现有技术相比,本实用新型的有益效果是:该带有加固结构的打包臂,可对基座环、基座和贯穿加固轴进行加固固定,改变机器人打包臂整体采用焊接方式,机器人打包臂设备线安装在基座环和基座内部,预防机器人打包臂设备线脱落。
11、1.本实用新型机器人打包臂内置连接线采用封装罩密封方式,预防机器人打包臂活动碰撞,对机器人打包臂外接线进行整理安装,降低机器人打包臂工作过程中脱落松动等。
12、2.本实用新型软连接罩能够折叠防护在机器人打包臂连接端上,软连接罩能够折叠包裹在机器人打包臂连接端线上,预防机器人打包臂连接端线活动脱落。
技术特征:
1.一种带有加固结构的打包臂,包括打包机器人臂(1)和活动轴盘(4),其特征在于;所述打包机器人臂(1)的上方安装有机械臂轴(2),且机械臂轴(2)的上方设置有打包臂内置防护机构(3),所述活动轴盘(4)安装于打包臂内置防护机构(3)的一侧,所述活动轴盘(4)的一侧设置有打包臂连接臂(5),且打包臂连接臂(5)的一侧安装有活动防护机构(6),所述打包机器人臂(1)的底端设置有基座加固机构(7),所述基座加固机构(7)包括基座环(701)、贯穿加固轴(702)和基座(703),且基座(703)的四周安装有贯穿加固轴(702),所述基座(703)的顶端设置有基座环(701)。
2.根据权利要求1所述的一种带有加固结构的打包臂,其特征在于:所述打包机器人臂(1)与机械臂轴(2)之间为活动连接,且机械臂轴(2)与打包臂内置防护机构(3)之间为轴承连接。
3.根据权利要求1所述的一种带有加固结构的打包臂,其特征在于:所述活动轴盘(4)与打包臂连接臂(5)之间为活动连接,且打包臂连接臂(5)的内部贯穿有活动防护机构(6)。
4.根据权利要求1所述的一种带有加固结构的打包臂,其特征在于:所述基座环(701)与贯穿加固轴(702)之间为螺纹连接,且基座环(701)通过贯穿加固轴(702)与基座(703)构成卡扣结构。
5.根据权利要求1所述的一种带有加固结构的打包臂,其特征在于:所述打包臂内置防护机构(3)包括封装罩(301)和嵌入柱(302),且封装罩(301)的下方安装有嵌入柱(302)。
6.根据权利要求5所述的一种带有加固结构的打包臂,其特征在于:所述封装罩(301)与嵌入柱(302)之间为螺纹连接,且嵌入柱(302)设置有七个。
7.根据权利要求1所述的一种带有加固结构的打包臂,其特征在于:所述活动防护机构(6)包括软连接罩(601)和贯穿柱(602),且软连接罩(601)的一侧安装有贯穿柱(602)。
8.根据权利要求7所述的一种带有加固结构的打包臂,其特征在于:所述软连接罩(601)与贯穿柱(602)之间为螺纹连接,且软连接罩(601)通过贯穿柱(602)与打包臂连接臂(5)构成折叠结构。
技术总结
本技术公开了一种带有加固结构的打包臂,包括打包机器人臂和活动轴盘,所述打包机器人臂的上方安装有机械臂轴,且机械臂轴的上方设置有打包臂内置防护机构,所述活动轴盘安装于打包臂内置防护机构的一侧,所述活动轴盘的一侧设置有打包臂连接臂,且打包臂连接臂的一侧安装有活动防护机构,所述打包机器人臂的底端设置有基座加固机构,所述基座加固机构包括基座环、贯穿加固轴和基座,且基座的四周安装有贯穿加固轴,所述基座的顶端设置有基座环。该带有加固结构的打包臂,可对基座环、基座和贯穿加固轴进行加固固定,改变机器人打包臂整体采用焊接方式,机器人打包臂设备线安装在基座环和基座内部,预防机器人打包臂设备线脱落。
技术研发人员:何睿权,夏猛秋,曾景慧,姜佳玲
受保护的技术使用者:深圳市赫牌实业有限公司
技术研发日:20230706
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!