一种可自动堆垛的叉车机器人的制作方法
本技术涉及叉车机器人,具体为一种可自动堆垛的叉车机器人。
背景技术:
1、自动堆垛叉车机器人是一种无人搬运设备,广泛应用于工业生产和物流仓储等领域。它是通过内置导航系统和控制系统实现自动运行的,可以根据预设路径自动搬运货物,大大提高了生产效率和减轻了工人劳动强度。
2、现有技术中,自动堆垛叉车机器人在运行装卸货物时,叉车机器人无法对装卸叉的插入深度做出判断,在装卸一些较小的货物时,若是装卸叉没有完全插入货物的装卸槽,在装卸叉抬升后会导致货物不稳定,从而会导致货物掉落损坏造成财产损失。
3、所以我们提出了一种可自动堆垛的叉车机器人,以便于解决上述中提出的问题。
技术实现思路
1、本实用新型的目的在于提供一种可自动堆垛的叉车机器人,以解决上述背景技术提出的自动堆垛叉车机器人在运行装卸货物时,叉车机器人无法对装卸叉的插入深度做出判断,在装卸一些较小的货物时,若是装卸叉没有完全插入货物的装卸槽,在装卸叉抬升后会导致货物不稳定,从而会导致货物掉落损坏造成财产损失的问题。
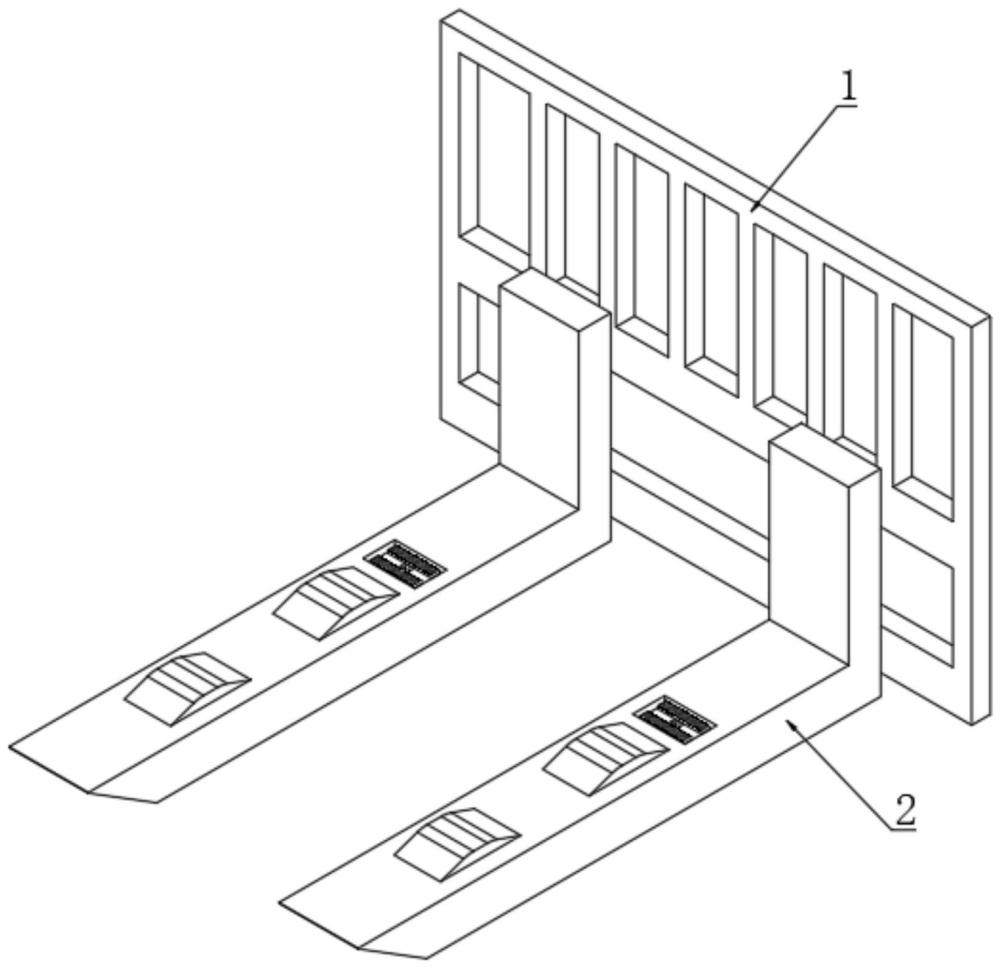
2、为实现上述目的,本实用新型提供如下技术方案:一种可自动堆垛的叉车机器人,包括:驱动机架;装卸叉组件,所述装卸叉组件数量设为两个,两个所述装卸叉组件对称设置在驱动机架前表面,所述装卸叉组件包括装卸叉主体,所述装卸叉主体上表面开设有槽口,两个所述槽口内底部之间开设有连通槽,所述槽口内部设置有压块。
3、优选的,所述压块上表面两侧均设置有弧面,所述连通槽与两个槽口呈连通设置。
4、优选的,所述压块下表面均匀固定连接有多个阻尼器,多个所述阻尼器外表面均套设有弹簧,所述阻尼器与弹簧下端面均与槽口内底部固定连接。
5、优选的,所述压块下表面固定连接有连接杆,所述连接杆下端面设置有绝缘片,所述绝缘片下表面设置有第一导电板,所述槽口内底部设置有第二导电板。
6、优选的,所述第一导电板与第二导电板呈配套设置,所述连通槽内底部设置有启动器,所述第二导电板外表面设置有电源线,所述电源线与启动器呈配套设置,所述启动器与驱动机架电性连接。
7、优选的,所述装卸叉主体上表面靠近右侧位置开设有安装槽,所述安装槽内底部固定连接有电动伸缩杆,所述电动伸缩杆上端面固定连接有支撑块,所述支撑块上表面中心处设置有红外距离传感器,所述支撑块上表面对称设置有橡胶垫。
8、与现有技术相比,本实用新型的有益效果是:
9、1、本实用新型中,在装卸货物时,在两个压块位置同时接触到货物时,两个压块被下压才会同时连通两个电源线,启动器在两侧的电源线同时连通后才会启动驱动机架抬升对货物进行堆垛,在装卸叉主体的插入深度到达右侧的压块位置时才能保证装卸的稳定性,通过两个压块同时被压迫才能启动驱动机架的设置,有效保证了叉车机器人装卸的稳定性,避免了财产损失。
10、2、本实用新型中,在红外距离传感器检测到装卸叉主体插入货物的装卸槽时,电动伸缩杆可以通过支撑块的连接带动橡胶垫上移贴合货物装卸槽的底部,可以起到提升装卸叉主体与货物之间摩擦力的作用,提升了装卸货物的稳定性。
技术特征:
1.一种可自动堆垛的叉车机器人,其特征在于,包括:
2.根据权利要求1所述的可自动堆垛的叉车机器人,其特征在于:所述压块(204)上表面两侧均设置有弧面(205),所述连通槽(203)与两个槽口(202)呈连通设置。
3.根据权利要求1所述的可自动堆垛的叉车机器人,其特征在于:所述压块(204)下表面均匀固定连接有多个阻尼器(206),多个所述阻尼器(206)外表面均套设有弹簧(207),所述阻尼器(206)与弹簧(207)下端面均与槽口(202)内底部固定连接。
4.根据权利要求1所述的可自动堆垛的叉车机器人,其特征在于:所述压块(204)下表面固定连接有连接杆(208),所述连接杆(208)下端面设置有绝缘片(209),所述绝缘片(209)下表面设置有第一导电板(210),所述槽口(202)内底部设置有第二导电板(211)。
5.根据权利要求4所述的可自动堆垛的叉车机器人,其特征在于:所述第一导电板(210)与第二导电板(211)呈配套设置,所述连通槽(203)内底部设置有启动器(213),所述第二导电板(211)外表面设置有电源线(212),所述电源线(212)与启动器(213)呈配套设置,所述启动器(213)与驱动机架(1)电性连接。
6.根据权利要求1所述的可自动堆垛的叉车机器人,其特征在于:所述装卸叉主体(201)上表面靠近右侧位置开设有安装槽,所述安装槽内底部固定连接有电动伸缩杆(214),所述电动伸缩杆(214)上端面固定连接有支撑块(215),所述支撑块(215)上表面中心处设置有红外距离传感器(216),所述支撑块(215)上表面对称设置有橡胶垫(217)。
技术总结
本技术公开了一种可自动堆垛的叉车机器人,包括:驱动机架;装卸叉组件,所述装卸叉组件数量设为两个,两个所述装卸叉组件对称设置在驱动机架前表面,所述装卸叉组件包括装卸叉主体,所述装卸叉主体上表面开设有槽口。本技术中,在装卸货物时,在两个压块位置同时接触到货物时,两个压块被下压才会同时连通两个电源线,启动器在两侧的电源线同时连通后才会启动驱动机架抬升对货物进行堆垛,在装卸叉主体的插入深度到达右侧的压块位置时才能保证装卸的稳定性,通过两个压块同时被压迫才能启动驱动机架的设置,有效保证了叉车机器人装卸的稳定性,避免了财产损失。
技术研发人员:程宇
受保护的技术使用者:杭州路泊科技有限公司
技术研发日:20230706
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!