一种自动定位装配设备物料运输装置的制作方法
本技术涉及运输装置,尤其涉及一种自动定位装配设备物料运输装置。
背景技术:
1、随着科学技术的不断进步,自动定位装配设备随之广泛应用于现代工业生产当中,凭借光学零件与结构件形状视觉识别,使之操作使用与维护方便,运行可靠性高,安全性能好,噪声低,外型美观具有一定的展示功能,大大提高了生产装配效率,然而,如何快速高效的给自动定位装配设备运输物料成为了当前值得关注的问题,现行的物料运输装置不能很好的适配自动定位装配设备,所以,我们在这里提出了一种自动定位装配设备物料运输装置;
2、本背景技术部分中公开的以上信息仅用于理解本发明构思的背景技术,并且因此,它可以包含不构成现有技术的信息。
技术实现思路
1、本实用新型的目的在于提供一种自动定位装配设备物料运输装置,以解决上述背景技术中提出的现行物料运输装置不能很好适配自动定位装配设备的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
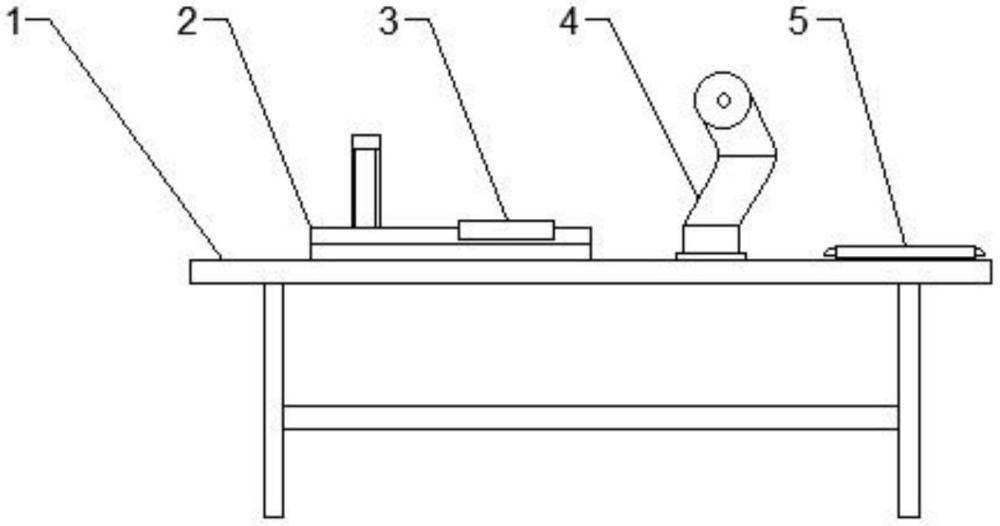
3、一种自动定位装配设备物料运输装置,包括工作台、组合手爪和托盘,所述工作台上放置有物料传送导轨,物料传送导轨上设置有放置平台,所述组合手爪安装在机械臂上,组合手爪包括有电动三爪和微型吸盘,所述托盘置于组合手爪右侧,托盘内放置有物料;
4、此外,优选的结构是,所述物料传送导轨有两条直线导轨组成,其中一个导轨专用于光学件的传送,另一个导轨专用于结构件的传送,通过托盘的定位机构进行区分,物料传送导轨由标准直线模组、伺服电机、位置传感器等组成;
5、此外,优选的结构是,所述机械臂采用高精度六轴机械臂与一个两指机械手组合,机械臂的重复定位精度为±0.01mm,工作半径为717mm,承受负载为7kg;
6、此外,优选的结构是,所述组合手爪自适应爪取不同尺寸规格的物料,电动三爪尾端设置有微型吸盘,微型吸盘与物料相连,物料包括小直径物料和大直径物料;
7、此外,优选的结构是,所述托盘两侧设置有铭牌,铭牌内设置有固定的位置编号,托盘内放置有物料;
8、本实用新型的有益效果是:
9、本实用新型中,通过机械臂和组合手爪的设置,可以较好的完成物料的运输放置,从而有利于自动定位装配设备进行定位和装配作业,大大提高了整体的工作效率,并提升了整体的机械自动化程度。
技术特征:
1.一种自动定位装配设备物料运输装置,包括工作台(1)、组合手爪(6)和托盘(5),其特征在于,所述工作台(1)上放置有物料传送导轨(2),物料传送导轨(2)上设置有放置平台(3),所述组合手爪(6)安装在机械臂(4)上,组合手爪(6)包括有电动三爪(61)和微型吸盘(62),所述托盘(5)置于组合手爪(6)右侧,托盘(5)内放置有物料(63)。
2.根据权利要求1所述的一种自动定位装配设备物料运输装置,其特征在于,所述物料传送导轨(2)有两条直线导轨组成,其中一个导轨专用于光学件的传送,另一个导轨专用于结构件的传送,通过托盘的定位机构进行区分,物料传送导轨(2)由标准直线模组、伺服电机、位置传感器等组成。
3.根据权利要求1所述的一种自动定位装配设备物料运输装置,其特征在于,所述机械臂(4)采用高精度六轴机械臂与一个两指机械手组合,机械臂(4)的重复定位精度为±0.01mm,工作半径为717mm,承受负载为7kg。
4.根据权利要求1所述的一种自动定位装配设备物料运输装置,其特征在于,所述组合手爪(6)自适应抓取不同尺寸规格的物料(63),电动三爪(61)尾端设置有微型吸盘(62),微型吸盘(62)与物料(63)相连,物料(63)包括小直径物料(631)和大直径物料(632)。
5.根据权利要求1所述的一种自动定位装配设备物料运输装置,其特征在于,所述托盘(5)两侧设置有铭牌(51),铭牌(51)内设置有固定的位置编号,托盘(5)内放置有物料(63)。
技术总结
本技术涉及运输装置技术领域,尤其涉及一种自动定位装配设备物料运输装置,包括工作台、组合手爪和托盘,所述工作台上放置有物料传送导轨,物料传送导轨上设置有放置平台,所述组合手爪安装在机械臂上,组合手爪包括有电动三爪和微型吸盘,所述托盘置于组合手爪右侧,托盘内放置有物料。本技术中,通过机械臂和组合手爪的设置,可以较好的完成物料的运输放置,从而有利于自动定位装配设备进行定位和装配作业,大大提高了整体的工作效率,并提升了整体的机械自动化程度。
技术研发人员:吴李宗,陈轩
受保护的技术使用者:扬州科莱光电技术有限公司
技术研发日:20230719
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!