一种饲料码垛装置的制作方法
:本技术涉及饲料码垛,具体为一种饲料码垛装置。
背景技术
0、
背景技术:
1、饲料原料经分级、混合、制粒等工序生产制备为成品后需进行装袋打包,成品打包好后由叉车运送到仓库进行储存,为了便于叉车运输,一般需将打包好的饲料成品放在托盘上码垛;
2、现有的饲料成品装袋打包后往往通过人工搬运进行码垛,劳动强度大,生产效率也非常低,无法满足企业的大批量生产需求,当前,随着科技的不断进步,码垛机器人已逐步应用于饲料码垛工序中,但由于其使用成本高,企业无法大批量投入使用,为此,提出一种饲料码垛装置。
技术实现思路
0、
技术实现要素:
1、本实用新型的目的在于提供一种饲料码垛装置,以解决上述背景技术中提出的问题之一。
2、本实用新型由如下技术方案实施:一种饲料码垛装置,包括转动夹持组件,所述转动夹持组件包括安装块、小电机、输出轴、限位盘、上凹槽、通孔、电动推拉杆、支撑框、销轴、夹持臂、推拉块,所述安装块的上表面固定连接有小电机,所述小电机的输出端固定连接有输出轴,所述输出轴的外侧壁上部固定连接有限位盘,所述安装块的上表面中心处均开设有上凹槽,所述上凹槽的内侧壁转动连接于限位盘的外侧壁,所述上凹槽的内底壁中心处开设有通孔,所述输出轴的外侧壁转动连接于通孔的内侧壁,所述输出轴的底部固定连接有电动推拉杆,所述电动推拉杆的外侧壁上部固定连接有支撑框,所述支撑框的底部两侧均通过销轴铰接有夹持臂,所述电动推拉杆的输出端固定连接有推拉块,所述推拉块的两侧滑动连接于两个夹持臂相靠近的一侧上部。
3、作为本技术方案的进一步优选的:所述安装块的下表面开设有下凹槽,所述电动推拉杆的外侧壁顶部转动连接于下凹槽的内侧壁。
4、作为本技术方案的进一步优选的:所述安装块的一侧固定连接有电动伸缩杆,所述电动伸缩杆外侧壁一侧固定连接有升降板。
5、作为本技术方案的进一步优选的:所述升降板的上表面中心处开设有安装孔,所述安装孔的内侧壁固定连接有螺纹筒,所述螺纹筒的内侧壁螺纹连接有螺纹杆,所述螺纹杆的底部固定连接有伺服电机,所述伺服电机的外侧壁上部固定连接有基板。
6、作为本技术方案的进一步优选的:所述伺服电机的外侧壁底部固定连接有加固环,所述加固环的外侧壁固定连接有多个安装脚,多个所述安装脚的上表面通过螺丝固定连接于基板的下表面靠近伺服电机的外侧。
7、作为本技术方案的进一步优选的:所述基板的上表面四角均固定连接有定位柱,所述升降板的上表面四角均开设有滑孔,所述定位柱的外侧壁滑动连接于滑孔的内侧壁。
8、作为本技术方案的进一步优选的:所述定位柱的顶部固定连接有限位板,所述限位板的上表面中心处开设有限位孔,所述螺纹杆的外侧壁顶部转动连接于限位孔的内侧壁。
9、作为本技术方案的进一步优选的:所述基板的底部四角均固定连接有万向轮,所述基板的一侧固定连接有推拉臂。
10、本实用新型的优点:本实用新型通过启动小电机驱动输出轴转动,从而对袋装饲料需要夹取的角度进行调节,启动伺服电机驱动螺纹杆转动,使夹持臂下移至袋装饲料两侧,启动电动推拉杆拉动推拉块上移,使两个夹持臂的下部对袋装饲料进行夹取,通过推动整个装置将夹取的袋装饲料进行搬运至指定位置,通过启动伺服电机和电动伸缩杆对饲料码垛位置进行调整,调整好码垛位置后启动电动推拉杆推动推拉块下移,使夹持臂松开对袋装饲料的夹持,从而完成袋装饲料的码垛,降低了劳动强度,提高了生产效率,使用成本与机械臂相比较低,整体性价比高,满足了企业的大批量生产需求。
技术特征:
1.一种饲料码垛装置,其特征在于,包括
2.根据权利要求1所述的一种饲料码垛装置,其特征在于,所述安装块(11)的下表面开设有下凹槽(22),所述电动推拉杆(17)的外侧壁顶部转动连接于下凹槽(22)的内侧壁。
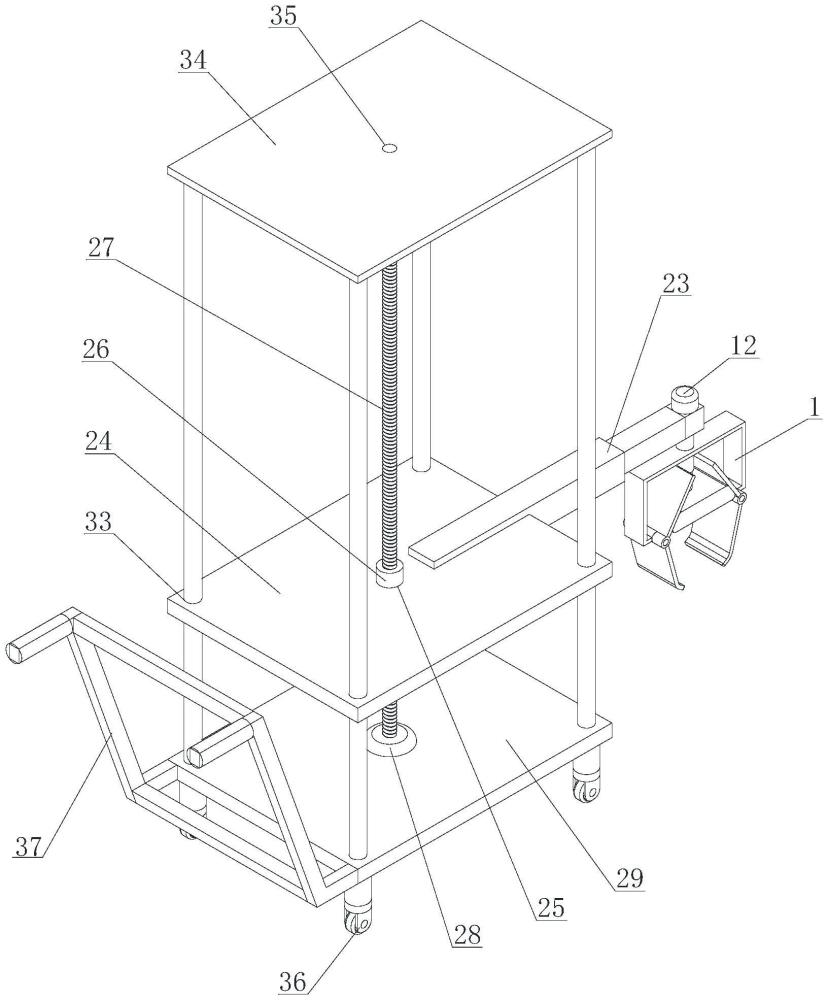
3.根据权利要求1所述的一种饲料码垛装置,其特征在于,所述安装块(11)的一侧固定连接有电动伸缩杆(23),所述电动伸缩杆(23)外侧壁一侧固定连接有升降板(24)。
4.根据权利要求3所述的一种饲料码垛装置,其特征在于,所述升降板(24)的上表面中心处开设有安装孔(25),所述安装孔(25)的内侧壁固定连接有螺纹筒(26),所述螺纹筒(26)的内侧壁螺纹连接有螺纹杆(27),所述螺纹杆(27)的底部固定连接有伺服电机(28),所述伺服电机(28)的外侧壁上部固定连接有基板(29)。
5.根据权利要求4所述的一种饲料码垛装置,其特征在于,所述伺服电机(28)的外侧壁底部固定连接有加固环(38),所述加固环(38)的外侧壁固定连接有多个安装脚(30),多个所述安装脚(30)的上表面通过螺丝(31)固定连接于基板(29)的下表面靠近伺服电机(28)的外侧。
6.根据权利要求4所述的一种饲料码垛装置,其特征在于,所述基板(29)的上表面四角均固定连接有定位柱(32),所述升降板(24)的上表面四角均开设有滑孔(33),所述定位柱(32)的外侧壁滑动连接于滑孔(33)的内侧壁。
7.根据权利要求6所述的一种饲料码垛装置,其特征在于,所述定位柱(32)的顶部固定连接有限位板(34),所述限位板(34)的上表面中心处开设有限位孔(35),所述螺纹杆(27)的外侧壁顶部转动连接于限位孔(35)的内侧壁。
8.根据权利要求4所述的一种饲料码垛装置,其特征在于,所述基板(29)的底部四角均固定连接有万向轮(36),所述基板(29)的一侧固定连接有推拉臂(37)。
技术总结
本技术公开了一种饲料码垛装置,包括转动夹持组件,所述转动夹持组件包括安装块、小电机。本技术通过启动小电机驱动输出轴转动,从而对袋装饲料需要夹取的角度进行调节,启动伺服电机驱动螺纹杆转动,使夹持臂下移至袋装饲料两侧,启动电动推拉杆拉动推拉块上移,使两个夹持臂的下部对袋装饲料进行夹取,通过推动整个装置将夹取的袋装饲料进行搬运至指定位置,通过启动伺服电机和电动伸缩杆对饲料码垛位置进行调整,调整好码垛位置后启动电动推拉杆推动推拉块下移,使夹持臂松开对袋装饲料的夹持,从而完成袋装饲料的码垛,降低了劳动强度,提高了生产效率,使用成本与机械臂相比较低,整体性价比高,满足了企业的大批量生产需求。
技术研发人员:贾阳,刘学珍,王珍如,郭燕菲
受保护的技术使用者:内蒙古鹿辰生物技术有限公司
技术研发日:20230720
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!