一种多工位对中装置的制作方法
本技术涉及对中装置领域,具体为一种多工位对中装置。
背景技术:
1、在电池片的加工过程中,需要对电池片进行输送,在实际生产中,位于某段输送线的末端往往会设置若干条出料线进行出料。为了保证出料后的产品在后续的加工中的位置精度,通常会在出料线的位置设置多个对中机构对产品进行对中,但是这种方式占地面积大,不便于安装。
2、鉴于此,有必要提供一种多工位对中装置。
技术实现思路
1、本实用新型提供的一种多工位对中装置,有效的解决了现有对中装置占地面积大、不便于安装的问题。
2、本实用新型所采用的技术方案是
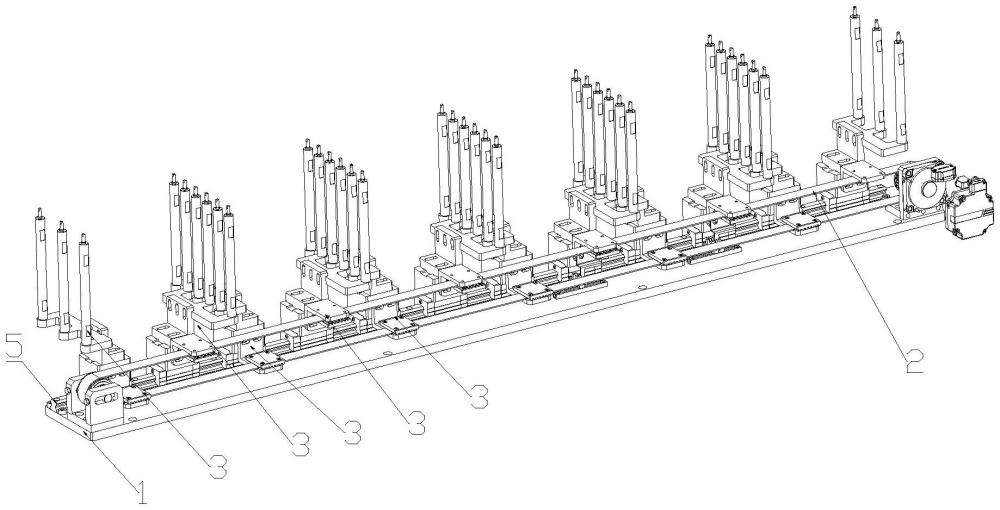
3、一种多工位对中装置,包括底座、设置在底座上的皮带输送线,所述皮带输送线包括设置在底座上的主动轮、从动轮、绕设在主动轮和从动轮上的同步带以及用于驱动主动轮转动的电机。还包括设置在底座上且与同步带平行的直线导轨以及偶数个滑动设置在直线导轨上的对中件,位于偶数位的对中件与同步带的上层固定连接,位于奇数位的对中件与同步带的下层固定连接。
4、进一步的是:所述对中件包括与直线导轨滑动连接的滑座、连接滑座与同步带的连接夹、设置在滑座上的连接板、设置在连接板上的若干对中杆,若干对中杆沿同步带的水平垂直方向平行设置。
5、进一步的是:所述对中杆包括固定设置在连接板上的金属杆、与金属杆螺纹连接的塑性杆,所述塑性杆的直径小于金属杆的直径,所述塑性杆的轴线与金属杆的轴线重合。
6、进一步的是:所述连接夹包括上夹、下夹以及连接上夹和下夹的螺柱,所述上夹和下夹的相对一侧设置有与同步带传输方向垂直的纹路。
7、进一步的是:所述滑座包括与直线导轨滑动连接的座体、与座体螺纹连接的l板,所述l板包括水平设置的一号板以及竖直设置的二号板,所述一号板上设置有与同步带输送方向平行的一号腰型槽,所述二号板上竖向设置有二号腰型槽,所述二号板与连接板螺纹可调连接,所述一号板与滑座螺纹可调连接。
8、实用新型的有益效果:能够同时对多个并列的输送线上的产品进行对中,便于节约占地空间。
技术特征:
1.一种多工位对中装置,包括底座(1)、设置在底座(1)上的皮带输送线(2),所述皮带输送线(2)包括设置在底座(1)上的主动轮(21)、从动轮(22)、绕设在主动轮(21)和从动轮(22)上的同步带(23)以及用于驱动主动轮(21)转动的电机(24),其特征在于:还包括设置在底座(1)上且与同步带(23)平行的直线导轨(5)以及偶数个滑动设置在直线导轨(5)上的对中件(3),位于偶数位的对中件(3)与同步带(23)的上层固定连接,位于奇数位的对中件(3)与同步带(23)的下层固定连接。
2.根据权利要求1所述的多工位对中装置,其特征在于:所述对中件(3)包括与直线导轨(5)滑动连接的滑座(31)、连接滑座(31)与同步带(23)的连接夹(32)、设置在滑座(31)上的连接板(33)、设置在连接板(33)上的若干对中杆(34),若干对中杆(34)沿同步带(23)的水平垂直方向平行设置。
3.根据权利要求2所述的多工位对中装置,其特征在于:所述对中杆(34)包括固定设置在连接板(33)上的金属杆(341)、与金属杆(341)螺纹连接的塑性杆(342),所述塑性杆(342)的直径小于金属杆(341)的直径,所述塑性杆(342)的轴线与金属杆(341)的轴线重合。
4.根据权利要求3所述的多工位对中装置,其特征在于:所述连接夹(32)包括上夹(321)、下夹(322)以及连接上夹(321)和下夹(322)的螺柱(323),所述上夹(321)和下夹(322)的相对一侧设置有与同步带(23)传输方向垂直的纹路。
5.根据权利要求4所述的多工位对中装置,其特征在于:所述滑座(31)包括与直线导轨(5)滑动连接的座体(311)、与座体(311)螺纹连接的l板,所述l板包括水平设置的一号板(312)以及竖直设置的二号板(313),所述一号板(312)上设置有与同步带(23)输送方向平行的一号腰型槽(301),所述二号板(313)上竖向设置有二号腰型槽(302),所述二号板(313)与连接板(33)螺纹可调连接,所述一号板(312)与滑座(31)螺纹可调连接。
技术总结
本技术公开一种多工位对中装置,包括底座、设置在底座上的皮带输送线,所述皮带输送线包括设置在底座上的主动轮、从动轮、绕设在主动轮和从动轮上的同步带以及用于驱动主动轮转动的电机。还包括设置在底座上且与同步带平行的直线导轨以及偶数个滑动设置在直线导轨上的对中件,位于偶数位的对中件与同步带的上层固定连接,位于奇数位的对中件与同步带的下层固定连接。优点:能够同时对多个并列的输送线上的产品进行对中,便于节约占地空间。
技术研发人员:翁学飞
受保护的技术使用者:苏州诚拓智能装备有限公司
技术研发日:20230724
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!