一种烟夹搬运装置及采摘机器人的制作方法
本技术属于农业机械,特别是涉及一种烟夹搬运装置及采摘机器人。
背景技术:
1、目前国内烟叶基本采用人工采摘方式,随着劳动力资源短缺以及机械自动化技术的迅速发展,利用机器人采摘替代人工作业成为必然趋势,开发烟叶采摘机器人用于烟草产业园收获作业具有重要意义。由于烟叶采摘作业环境复杂,严重制约了采摘自动化的发展,目标识别、采摘节点定位与采摘后烟叶输送与编织是烟叶采摘机器人的关键技术,其性能决定了烟叶采摘的效率及质量,但是现有技术并不能自动取走已经编制好的烟夹,并将其放到指定的仓储位置。
技术实现思路
1、有鉴于此,本实用新型旨在提出一种烟夹搬运装置及采摘机器人,以解决现有技术并不能自动取走已经编制好的烟夹,并将其放到指定的仓储位置的问题。
2、为实现上述目的,本实用新型采用以下技术方案:
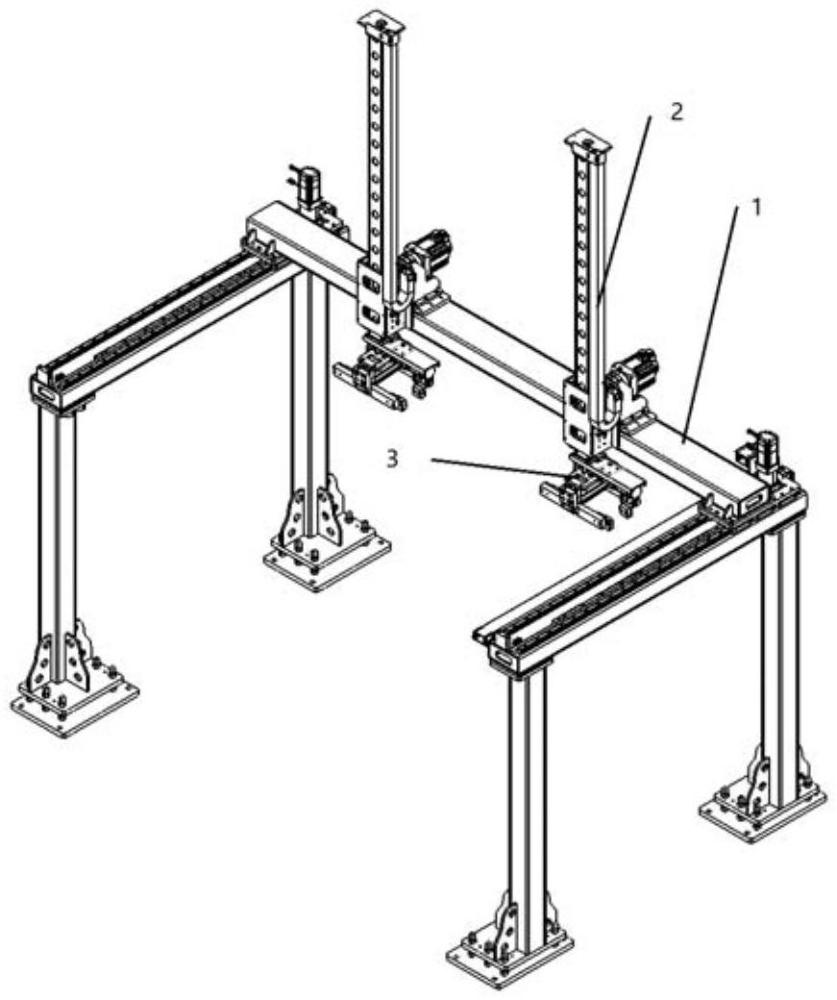
3、一种烟夹搬运装置,包括支架、夹爪支撑移动机构以及夹爪机构,所述夹爪机构安装在夹爪支撑移动机构上,所述夹爪支撑移动机构通过第一安装板安装在支架上,所述夹爪支撑移动机构包括第二导轨与第二坦克链,所述第二坦克链安装在第二导轨侧端,所述夹爪机构与第二坦克链通过夹爪安装板连接。
4、更进一步的,所述第二坦克链与第二伺服电机连接,所述第二伺服电机安装在伺服电机安装板,所述伺服电机安装板与第一安装板连接。
5、更进一步的,所述夹爪机构包括第二安装板、气动夹爪以及夹具,所述气动夹爪的两端皆安装有夹具,所述气动夹爪与第二安装板连接,所述第二安装板与夹爪安装板连接。
6、更进一步的,所述夹具的内端设有硅橡胶。
7、更进一步的,所述气动夹爪与第三伺服电机连接。
8、更进一步的,所述第三伺服电机与气动夹爪之间设有减速器和联轴器。
9、更进一步的,所述支架包括立柱、横柱、第一导轨以及第一坦克链,所述立柱上安装有第一导轨,所述第一导轨与第一坦克链连接,所述横柱的两端分别与两个第一坦克链连接。
10、更进一步的,所述第一坦克链与第一伺服电机连接。
11、更进一步的,所述立柱底部安装有支架底座,所述支架底座与立柱之间设有支撑肋板。
12、更进一步的,所述第一伺服电机、第二伺服电机和第三伺服电机皆连接有各类传感器和测控系统。
13、更进一步的,一种采摘机器人,所述采摘机器人包括所述的烟夹搬运装置。
14、与现有技术相比,本实用新型的有益效果是:
15、1、本发明可以实现烟叶编织打包工作完成之后的烟夹自动搬运工作,将烟夹直接搬运到指定的位置或者放于规定的集装箱中,完成烟叶采摘一体化的最后搬运工作,可以直接将烟夹运输到下一地点进行加工,省去了人力搬运的工作,同时机械的操作能够更好减少烟叶在运输过程中的破损,使烟叶品相更好,能够提高经济效益。
16、2、本发明中的所有设备均采用不产生环境污染、符合环境保护要求的设备,采用的材料均符合国家的法规卫生、环保要求。
17、3、本发明在工作时通过计算机检测传感器信号,控制伺服电机实现烟夹自动搬运打包工作,其提供了更高的精度与效率,相较于其他烟叶自动采摘一体机最后还需要人工搬运的步骤。
技术特征:
1.一种烟夹搬运装置,其特征在于:包括支架(1)、夹爪支撑移动机构(2)以及夹爪机构(3),所述夹爪机构(3)安装在夹爪支撑移动机构(2)上,所述夹爪支撑移动机构(2)通过第一安装板(11)安装在支架(1)上,所述夹爪支撑移动机构(2)包括第二导轨(12)与第二坦克链(13),所述第二坦克链(13)安装在第二导轨(12)侧端,所述夹爪机构(3)与第二坦克链(13)通过夹爪安装板(16)连接。
2.根据权利要求1所述的一种烟夹搬运装置,其特征在于:所述第二坦克链(13)与第二伺服电机(14)连接,所述第二伺服电机(14)安装在伺服电机安装板(15),所述伺服电机安装板(15)与第一安装板(11)连接。
3.根据权利要求1所述的一种烟夹搬运装置,其特征在于:所述夹爪机构(3)包括第二安装板(18)、气动夹爪(21)以及夹具(22),所述气动夹爪(21)的两端皆安装有夹具(22),所述气动夹爪(21)与第二安装板(18)连接,所述第二安装板(18)与夹爪安装板(16)连接。
4.根据权利要求3所述的一种烟夹搬运装置,其特征在于:所述夹具(22)的内端设有硅橡胶(23)。
5.根据权利要求3所述的一种烟夹搬运装置,其特征在于:所述气动夹爪(21)与第三伺服电机(17)连接。
6.根据权利要求5所述的一种烟夹搬运装置,其特征在于:所述第三伺服电机(17)与气动夹爪(21)之间设有减速器(19)和联轴器(20)。
7.根据权利要求1所述的一种烟夹搬运装置,其特征在于:所述支架(1)包括立柱(6)、横柱(10)、第一导轨(7)以及第一坦克链(8),所述立柱(6)上安装有第一导轨(7),所述第一导轨(7)与第一坦克链(8)连接,所述横柱(10)的两端分别与两个第一坦克链(8)连接。
8.根据权利要求7所述的一种烟夹搬运装置,其特征在于:所述第一坦克链(8)与第一伺服电机(9)连接。
9.根据权利要求7所述的一种烟夹搬运装置,其特征在于:所述立柱(6)底部安装有支架底座(4),所述支架底座(4)与立柱(6)之间设有支撑肋板(5)。
10.一种采摘机器人,其特征在于:所述采摘机器人包括权利要求1-9中任意一项所述的烟夹搬运装置。
技术总结
本技术提出了一种烟夹搬运装置及采摘机器人,属于农业机械技术领域。解决了现有技术并不能自动取走已经编制好的烟夹,并将其放到指定的仓储位置的问题。它包括支架、夹爪支撑移动机构以及夹爪机构,夹爪机构安装在夹爪支撑移动机构上,夹爪支撑移动机构通过第一安装板安装在支架上,夹爪支撑移动机构包括第二导轨与第二坦克链,第二坦克链安装在第二导轨侧端,夹爪机构与第二坦克链通过夹爪安装板连接,第二坦克链与第二伺服电机连接,第二伺服电机安装在伺服电机安装板,夹爪机构包括第二安装板、气动夹爪以及夹具,气动夹爪的两端皆安装有夹具,气动夹爪与第二安装板连接。它主要用于烟夹搬运。
技术研发人员:谭定忠,贺国强,于跃,段俊礼,陈思燃,王春军,苗绪潭,张东明,魏冠一,李超,毛卫佳,曹春琪,孙宏伟,王昊,高金旭,刘军,刘鑫
受保护的技术使用者:中国烟草总公司黑龙江省公司烟草科学研究所
技术研发日:20230724
技术公布日:2024/1/22
- 还没有人留言评论。精彩留言会获得点赞!