一种码垛机器人吸附式手抓结构的制作方法
本技术涉及码垛机器人,尤其涉及一种码垛机器人吸附式手抓结构。
背景技术:
1、码垛机器人多用于工厂中,其抓手大多为夹持式抓手,容易对物件造成损伤,导致物件出现损坏。
2、经检索,公开号为cn210361369u公示了一种码垛机器人吸盘手抓,通过在吸盘的左右两端设置有伸缩的侧吸盘,进而增多了受力点,使得受力更加均匀,然而存在以下缺陷,其侧吸板是活动的,在移动的过程中容易产生晃动,导致侧吸板上的吸盘不易与物品垂直接触,从而影响抓取效率。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种码垛机器人吸附式手抓结构。
2、为了实现上述目的,本实用新型采用了如下技术方案:
3、一种码垛机器人吸附式手抓结构,包括抓手本体,所述抓手本体的两侧均设有固定架,所述抓手本体的上表面固定连接有双向气缸,且双向气缸与固定架相固定,所述固定架内转动连接有转动架,转动架的两端均固定连接有扭簧,且扭簧与安装架相固定,所述转动架的外侧开设有两个限位槽,所述安装架内设有对转动架进行辅助限位的限位机构。
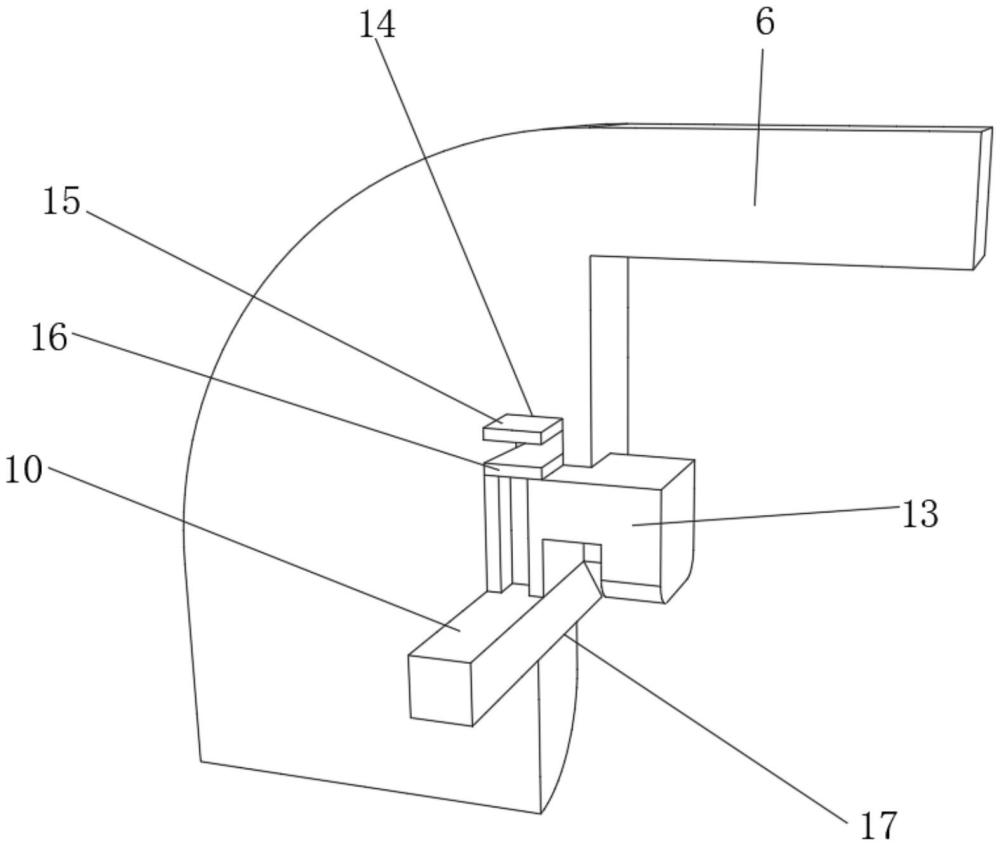
4、作为本实用新型再进一步的方案,所述限位机构包括滑架,所述固定架的两侧均开设有滑槽,所述滑架与滑槽滑动连接,所述滑架的顶部固定连接有第二磁块,所述滑槽内固定连接有第一磁块,且第一磁块与第二磁块相斥,所述滑槽的底部开设有插槽,插槽内插接有插杆。
5、作为本实用新型再进一步的方案,所述安装架的一侧固定连接有两个导向杆。
6、作为本实用新型再进一步的方案,所述抓手本体内开设有两个避位孔,且导向杆与避位孔滑动连接。
7、作为本实用新型再进一步的方案,所述抓手本体的一侧固定连接有固定架。
8、作为本实用新型再进一步的方案,所述固定架的一侧固定连接有橡胶垫。
9、作为本实用新型再进一步的方案,所述固定架的一侧开设有多个安装孔。
10、作为本实用新型再进一步的方案,所述固定架的两侧均固定连接有两个固定块,且固定块与抓手本体相固定。
11、本实用新型的有益效果为:
12、1.通过扭簧的设置,当使用机器人进行抓取时,在扭簧的作用下可以使转动架上的吸盘一直与物品垂直接触,从而可以避免转动架发生晃动,提高了机器人抓取的效率。
13、2.通过限位机构的设置,限位机构可以对转动架的位置进行限位,从而可以使转动架上的吸盘对物品吸附的更加稳定,提高了机器人抓取的稳定性。
14、3.通过固定架的设置,工作人员可以使用固定螺栓穿过固定架上的安装孔将抓手进行固定,从而方便对抓手进行安装和拆卸,提高了抓手使用的便捷性。
技术特征:
1.一种码垛机器人吸附式手抓结构,包括抓手本体(1),其特征在于,所述抓手本体(1)的两侧均设有固定架(2),所述抓手本体(1)的上表面固定连接有双向气缸(7),且双向气缸(7)与固定架(2)相固定,所述固定架(2)内转动连接有转动架(5),转动架(5)的两端均固定连接有扭簧(12),且扭簧(12)与安装架(6)相固定,所述转动架(5)的外侧开设有两个限位槽(11),所述安装架(6)内设有对转动架(5)进行辅助限位的限位机构。
2.根据权利要求1所述的一种码垛机器人吸附式手抓结构,其特征在于,所述限位机构包括滑架(13),所述固定架(2)的两侧均开设有滑槽(14),所述滑架(13)与滑槽(14)滑动连接,所述滑架(13)的顶部固定连接有第二磁块(16),所述滑槽(14)内固定连接有第一磁块(15),且第一磁块(15)与第二磁块(16)相斥,所述滑槽(14)的底部开设有插槽(17),插槽(17)内插接有插杆(10)。
3.根据权利要求1所述的一种码垛机器人吸附式手抓结构,其特征在于,所述安装架(6)的一侧固定连接有两个导向杆(8)。
4.根据权利要求1所述的一种码垛机器人吸附式手抓结构,其特征在于,所述抓手本体(1)内开设有两个避位孔(9),且导向杆(8)与避位孔(9)滑动连接。
5.根据权利要求4所述的一种码垛机器人吸附式手抓结构,其特征在于,所述抓手本体(1)的一侧固定连接有固定架(2)。
6.根据权利要求5所述的一种码垛机器人吸附式手抓结构,其特征在于,所述固定架(2)的一侧固定连接有橡胶垫(3)。
7.根据权利要求6所述的一种码垛机器人吸附式手抓结构,其特征在于,所述固定架(2)的一侧开设有多个安装孔。
8.根据权利要求7所述的一种码垛机器人吸附式手抓结构,其特征在于,所述固定架(2)的两侧均固定连接有两个固定块(4),且固定块(4)与抓手本体(1)相固定。
技术总结
本技术公开了一种码垛机器人吸附式手抓结构,包括抓手本体,所述抓手本体的两侧均设有固定架,所述抓手本体的上表面固定连接有双向气缸,且双向气缸与固定架相固定,所述固定架内转动连接有转动架,转动架的两端均固定连接有扭簧,且扭簧与安装架相固定,所述转动架的外侧开设有两个限位槽,所述安装架内设有对转动架进行辅助限位的限位机构。本技术不仅能够使转动架上的吸盘一直与物品垂直接触,从而可以避免转动架发生晃动,提高了机器人抓取的效率,而且能够使转动架上的吸盘对物品吸附的更加稳定,提高了机器人抓取的稳定性,还能够方便对抓手进行安装和拆卸,提高了抓手使用的便捷性。
技术研发人员:彭波,李小清,姚博文
受保护的技术使用者:苏州比邻星智能装备有限公司
技术研发日:20230728
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!