一种适应性搬运码垛机器人
本技术涉及码垛机器人,具体涉及一种适应性搬运码垛机器人。
背景技术:
1、码垛机器人,是机械与计算机程序有机结合的产物。为现代生产提供了更高的生产效率。码垛机器在码垛行业有着相当广泛的应用。码垛机器人大大节省了劳动力,节省空间。码垛机器人运作灵活精准、快速高效、稳定性高,作业效率高,在码垛机器人对货物进行码垛时,由于码垛机器人的码垛抓手多为条状,在码垛抓手抓取货物时,货物的下方没有阻挡结构,一旦出现夹持不充分的情况,会出现货物掉落的概率,且现在的码垛抓手一般只能夹持一个货物,造成搬运的效率大大的降低。
技术实现思路
1、本实用新型所要解决的技术问题是提供一种适应性搬运码垛机器人,能根据叠放货物的高度调整货物通道的高度,并同时调节调节板的高度,使得能一次性完成叠放在一起的货物的搬运,且货物的底部摆放于u型底板上,避免了掉落,增加了安全性。
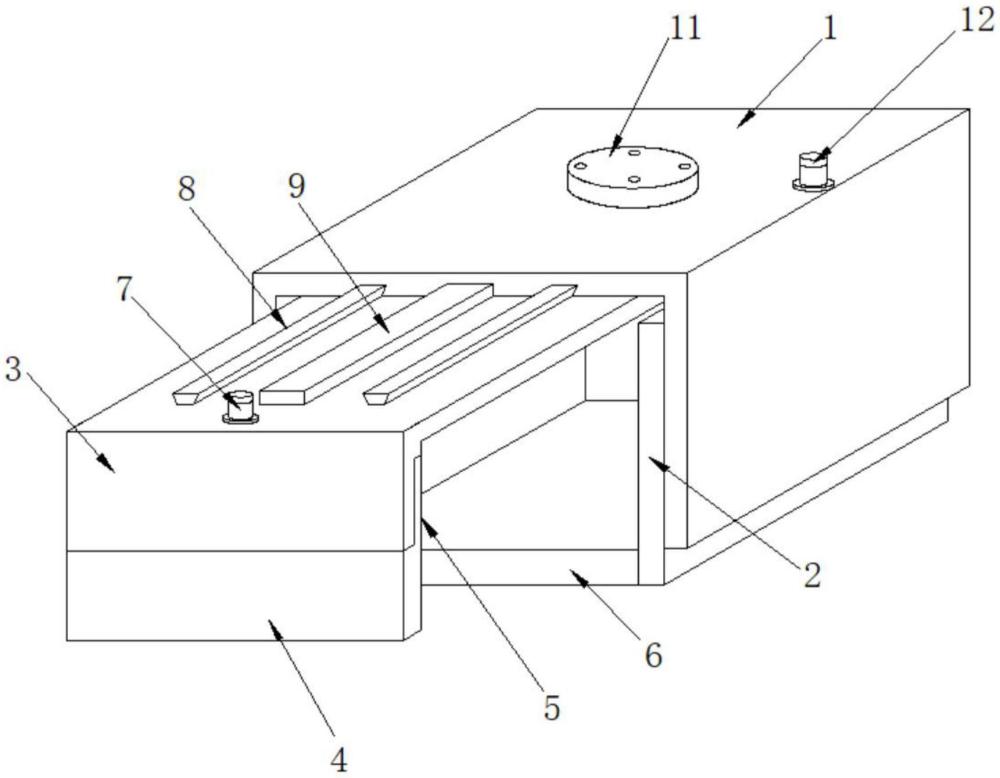
2、本实用新型是通过以下技术方案来实现的:一种适应性搬运码垛机器人,包括u型底板和u型顶板,所述u型顶板套设于u型底板的上端,u型顶板和u型底板之间形成货物通道,货物通道前方的开口中设有推板,推板的顶面与u型顶板内部的顶面接触,推板远离货物通道的一端垂直设有调节板,推板的顶面上安装有带动调节板上下移动的第一调节组件,u型顶板的顶面上安装有带动u型底板上下移动的第二调节组件,u型顶板内部的顶面上安装有带动推板前后移动的电动滑台。
3、作为优选的技术方案,第一调节组件包括第一刹车电机、第一螺杆和多根第一定位条,推板呈“l”型结构设置,推板垂直一端的内侧面上凹陷形成连接槽,调节板的顶面上凸出形成连接部,连接部插入连接槽中,连接槽的内壁面上垂直设有多条第一定位槽,第一定位条均滑动安装于第一定位槽中,第一定位条的一侧均安装于连接部的内侧面上,调节板的顶面上还设有第一螺丝孔,推板的顶面正对于第一螺丝孔处设有第一轴孔,第一刹车电机安装于推板的顶面上,第一刹车电机的转轴插入第一轴孔中,并通过联轴器与第一螺杆固定连接,第一螺杆下端螺纹连接于第一螺丝孔中。
4、作为优选的技术方案,第二调节组件包括第二刹车电机、第二螺杆和多根第二定位条,u型底板的两侧均设有多条第二定位槽,第二定位条均滑动安装于第二定位槽中,第二定位条的外侧面均安装于u型顶板的内侧面上,u型底板的顶面上设有第二螺丝孔,u型顶板的顶面正对于第二螺丝孔处设有第二轴孔,第二刹车电机安装于u型顶板的顶面上,第二刹车电机的转轴穿过第二轴孔,并通过联轴器与第二螺杆固定连接,第二螺杆下端螺纹连接于第二螺丝孔中。
5、作为优选的技术方案,u型顶板的顶面上设有凹槽,电动滑台安装于凹槽中,电动滑台的前方凸出u型顶板设置,电动滑台的移动平台安装于u型顶板的顶面上。
6、作为优选的技术方案,u型顶板内部的顶面上设有多条第三定位槽,第三定位槽中均滑动安装有第三定位条,第三定位条的底面均安装于推板的顶面上。
7、作为优选的技术方案,u型顶板的顶面上安装有与机械臂连接的连接座。
8、本实用新型的有益效果是:本实用新型结构简单,能根据叠放货物的高度调整u型顶板和u型底板之间货物通道的高度,并同时调节调节板下降的距离,增加推板垂直一端的高度,使得能一次性将叠放在一起的货物推入货物通道中,且货物的底部摆放于u型底板上,避免了掉落,增加了安全性。
技术特征:
1.一种适应性搬运码垛机器人,其特征在于:包括u型底板(2)和u型顶板(1),所述u型顶板(1)套设于u型底板(2)的上端,u型顶板(1)和u型底板(2)之间形成货物通道,货物通道前方的开口中设有推板(3),推板(3)的顶面与u型顶板(1)内部的顶面接触,推板(3)远离货物通道的一端垂直设有调节板(4),推板(3)的顶面上安装有带动调节板(4)上下移动的第一调节组件,u型顶板(1)的顶面上安装有带动u型底板(2)上下移动的第二调节组件,u型顶板(1)内部的顶面上安装有带动推板(3)前后移动的电动滑台(9)。
2.根据权利要求1所述的适应性搬运码垛机器人,其特征在于:第一调节组件包括第一刹车电机(7)、第一螺杆和多根第一定位条(14),推板(3)呈“l”型结构设置,推板(3)垂直一端的内侧面上凹陷形成连接槽,调节板(4)的顶面上凸出形成连接部(5),连接部(5)插入连接槽中,连接槽的内壁面上垂直设有多条第一定位槽,第一定位条(14)均滑动安装于第一定位槽中,第一定位条(14)的一侧均安装于连接部(5)的内侧面上,调节板(4)的顶面上还设有第一螺丝孔(15),推板(3)的顶面正对于第一螺丝孔(15)处设有第一轴孔,第一刹车电机(7)安装于推板(3)的顶面上,第一刹车电机(7)的转轴插入第一轴孔中,并通过联轴器与第一螺杆固定连接,第一螺杆下端螺纹连接于第一螺丝孔(15)中。
3.根据权利要求1所述的适应性搬运码垛机器人,其特征在于:第二调节组件包括第二刹车电机(12)、第二螺杆和多根第二定位条,u型底板(2)的两侧均设有多条第二定位槽(13),第二定位条均滑动安装于第二定位槽(13)中,第二定位条的外侧面均安装于u型顶板(1)的内侧面上,u型底板(2)的顶面上设有第二螺丝孔(16),u型顶板(1)的顶面正对于第二螺丝孔(16)处设有第二轴孔,第二刹车电机(12)安装于u型顶板(1)的顶面上,第二刹车电机(12)的转轴穿过第二轴孔,并通过联轴器与第二螺杆固定连接,第二螺杆下端螺纹连接于第二螺丝孔(16)中。
4.根据权利要求1所述的适应性搬运码垛机器人,其特征在于:u型顶板(1)的顶面上设有凹槽,电动滑台(9)安装于凹槽中,电动滑台(9)的前方凸出u型顶板(1)设置,电动滑台(9)的移动平台安装于u型顶板(1)的顶面上。
5.根据权利要求1所述的适应性搬运码垛机器人,其特征在于:u型顶板(1)内部的顶面上设有多条第三定位槽,第三定位槽中均滑动安装有第三定位条(8),第三定位条(8)的底面均安装于推板(3)的顶面上。
6.根据权利要求1所述的适应性搬运码垛机器人,其特征在于:u型顶板(1)的顶面上安装有与机械臂连接的连接座(11)。
技术总结
本技术涉及码垛机器人技术领域,具体涉及一种适应性搬运码垛机器人,包括U型底板和U型顶板,所述U型顶板套设于U型底板的上端,U型顶板和U型底板之间形成货物通道,货物通道前方的开口中设有推板,推板的顶面与U型顶板内部的顶面接触,推板远离货物通道的一端垂直设有调节板,推板的顶面上安装有带动调节板上下移动的第一调节组件,U型顶板的顶面上安装有带动U型底板上下移动的第二调节组件,U型顶板内部的顶面上安装有带动推板前后移动的电动滑台。本技术结构简单,能一次性将叠放在一起的货物推入货物通道中,且货物的底部摆放于U型底板上,避免了掉落,增加了安全性。
技术研发人员:段利英,欧阳丽君,马进杰,曹鹏鹏
受保护的技术使用者:湖北三峡职业技术学院
技术研发日:20230801
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!