一种可快速切换搬运治具的气平衡机械手的制作方法
本技术涉及助力机械手,特别是涉及一种可快速切换搬运治具的气平衡机械手。
背景技术:
1、目前,同一个气平衡机械手夹头一般只能装夹同一种产品,气平衡机械手与夹头(工作头)之间的连接都是硬连接,即由螺纹紧固的连接,致使气平衡机械手柔性大打折扣,如果遇到更换产品的时候,更换夹头更是困难。
技术实现思路
1、本实用新型的目的在于提供一种可以方便快捷的更换夹头,使机械手柔性得到了很大的高,且能节省工位,节省成本,大大的增加工业生产的效益的可快速切换搬运治具的气平衡机械手,以及解上述技术问题。
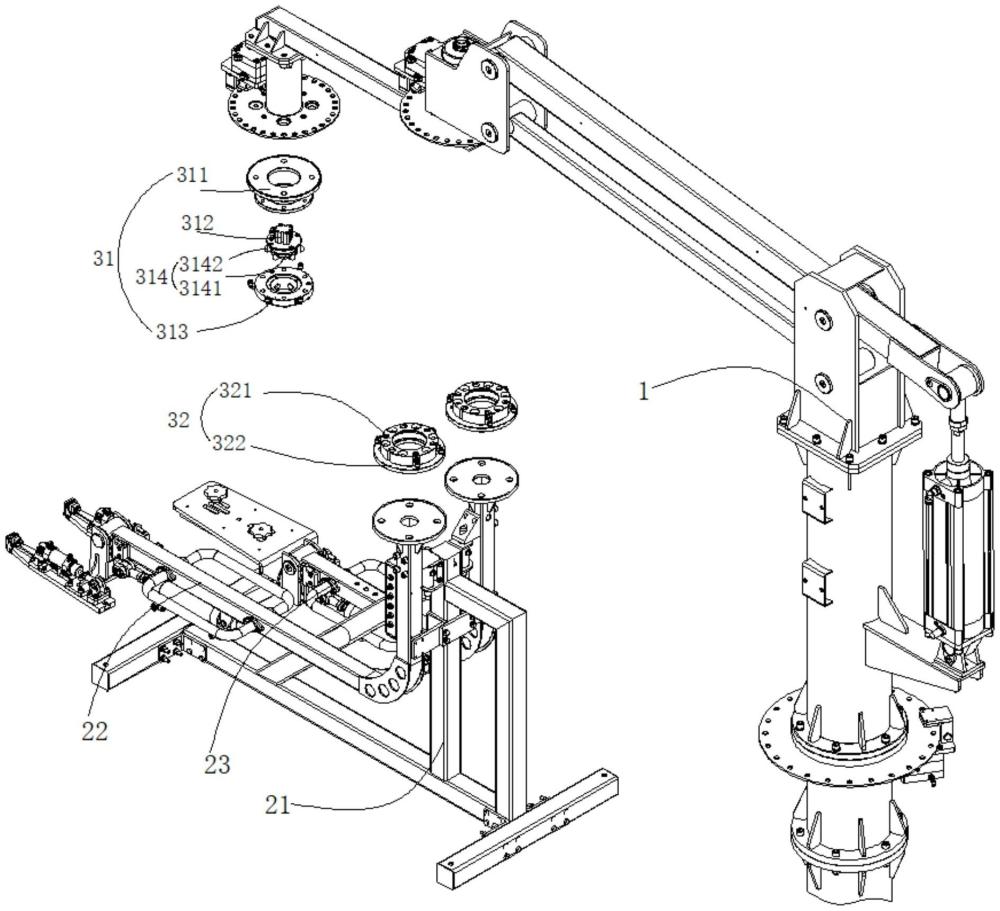
2、为实现上述技术方案,本实用新型的技术方案如下:一种可快速切换搬运治具的气平衡机械手,包括机械手本体以及设置于所述机械手本体前方的工具库部件,该气平衡机械手还包括气动快换治具;该气动快换治具包括安装在械手本体上的快换主盘部件及安装于工具库部件上的快换副盘;
3、其中:所述快换主盘部件包括快换主盘连接支架,所述快换主盘连接支架内侧固设有第一驱动源,用于提供动力;所述快换主盘连接支架一端可拆卸连接有定位座;所述定位座上可移动设有锁紧组件,所述第一驱动源可驱动所述锁紧组件来回往复移动;
4、所述快换副盘包括同轴设置的副盘连接法兰和连接治具;所述连接治具设有与所述锁紧组件相匹配的夹紧弧面。
5、进一步地,所述第一驱动源为气缸,所述气缸通过气缸安装板固设于所述定位座上;所述气缸的推杆与所述锁紧组件固定连接。
6、进一步地,所述锁紧组件包括活动芯子;所述活动芯子周侧上圆周阵列设有淬火钢珠;所述淬火钢珠可滚动设置于所述位座上;所述气缸驱动所述活动芯子沿竖直方向下移的过程中推动所述淬火钢珠沿定位座的径向方向向外移动;所述活动芯子一端圆角设置,且与所述活动芯子点接触设置。
7、进一步地,所述定位座上可拆卸设有定位针;所述定位座上阵列设有气流孔;所述气流孔上密封性旋接有贯穿的空心螺栓,用于接通连接治具上的气路。
8、进一步地,所述工具库部件包括工具支架;所述工具支架两侧分别悬挂有第一搬运治具和第二搬运治具;所述第一搬运治具和第二搬运治具均与所述快换副盘连接。
9、进一步地,所述第一搬运治具包括第一搬运支架;所述第一搬运支架上可摆动设有第二驱动源;所述第一搬运支架末端可转动设有第一夹紧治具;所述第二驱动源可驱动所述第一夹紧治具来回往复摆动;
10、第二搬运治具包括第二搬运支架;所述第二搬运支架上可摆动设有第三驱动源;所述第二搬运支架末端可转动设有第二夹紧治具;所述第三驱动源可驱动所述第二夹紧治具来回往复摆动。
11、进一步地,所述第二驱动源和第三驱动源均为推动气缸;所述推动气缸通过气缸安装座分别安装在第一搬运支架和第二搬运支架上。
12、与现有技术相比较,本实用新型具有如下有益效果:
13、1)、本实用新型的气动快换治具的锁紧力大,结构简单,尺寸紧凑;
14、2)、本实用新型的气动快换治具可实现机器人工具的快速自动切换,有利于实现加工过程的自动化,提高生产效率;
15、3)、本实用新型可以方便快捷的更换夹头,使机械手柔性得到了很大的提高,能有效节省工位,节省成本,大大的增加工业生产的效益。
技术特征:
1.一种可快速切换搬运治具的气平衡机械手,包括机械手本体(1)以及设置于所述机械手本体(1)前方的工具库部件(2),其特征在于:该气平衡机械手还包括气动快换治具(3);该气动快换治具(3)包括安装在械手本体(1)上的快换主盘部件(31)及安装于工具库部件(2)上的快换副盘(32);
2.如权利要求1所述的可快速切换搬运治具的气平衡机械手,其特征在于:所述第一驱动源(312)为气缸,所述气缸通过气缸安装板(4)固设于所述定位座(313)上;所述气缸的推杆与所述锁紧组件(314)固定连接。
3.如权利要求2所述的可快速切换搬运治具的气平衡机械手,其特征在于:所述锁紧组件(314)包括活动芯子(3141);所述活动芯子(3141)周侧上圆周阵列设有淬火钢珠(3142);所述淬火钢珠(3142)可滚动设置于所述位座(313)上;所述气缸驱动所述活动芯子(3141)沿竖直方向下移的过程中推动所述淬火钢珠(3142)沿定位座(313)的径向方向向外移动;所述活动芯子(3141)一端圆角设置,且与所述活动芯子(3141)点接触设置。
4.如权利要求2所述的可快速切换搬运治具的气平衡机械手,其特征在于:所述定位座(313)上可拆卸设有定位针;所述定位座(313)上阵列设有气流孔;所述气流孔上密封性旋接有贯穿的空心螺栓,用于接通连接治具(322)上的气路。
5.如权利要求1所述的可快速切换搬运治具的气平衡机械手,其特征在于:所述工具库部件(2)包括工具支架(21);所述工具支架(21)两侧分别悬挂有第一搬运治具(22)和第二搬运治具(23);所述第一搬运治具(22)和第二搬运治具(23)均与所述快换副盘(32)连接。
6.如权利要求5所述的可快速切换搬运治具的气平衡机械手,其特征在于:所述第一搬运治具(22)包括第一搬运支架(221);所述第一搬运支架(221)上可摆动设有第二驱动源(222);所述第一搬运支架(221)末端可转动设有第一夹紧治具(223);所述第二驱动源(222)可驱动所述第一夹紧治具(223)来回往复摆动;
7.如权利要求6所述的可快速切换搬运治具的气平衡机械手,其特征在于:所述第二驱动源(222)和第三驱动源(232)均为推动气缸;所述推动气缸通过气缸安装座分别安装在第一搬运支架(221)和第二搬运支架(231)上。
技术总结
本技术涉及一种可快速切换搬运治具的气平衡机械手,包括机械手本体以及设置于所述机械手本体前方的工具库部件,该气平衡机械手还包括气动快换治具;该气动快换治具包括安装在械手本体上的快换主盘部件及安装于工具库部件上的快换副盘。本技术气动快换治具可实现机器人工具的快速自动切换,有利于实现加工过程的自动化,提高生产效率。
技术研发人员:张达,吴彬,柯冶岱,吴丽珍,周卫平
受保护的技术使用者:厦门德锐克智能科技有限公司
技术研发日:20230808
技术公布日:2024/2/6
- 还没有人留言评论。精彩留言会获得点赞!