一种取件码垛双功能抓手的制作方法
本技术涉及机械抓手,具体是一种取件码垛双功能抓手。
背景技术:
1、在压铸产品加工过程中,需要经过切边、去毛刺、打标等工序处理,而产品在切边机、去毛刺转盘、打标机、隔板之间转移可以通过机器人实现,且隔板上摆满压铸产品后,将隔板转移出去也可以通过机器人实现,但是抓取产品与抓取隔板的机械爪手是不同,为此设置两个不同的机器的话,会大大增加投入成本;采用同一个机器则需要人工对机械爪手进行来回更换,费时费力。
2、基于此,本实用新型想要提供一种取件码垛双功能抓手,该双功能抓手不仅能够抓取压铸产品,还能够抓取隔板,解决抓手来回更换,费时费力的问题。
技术实现思路
1、为了弥补现有技术问题的不足,本实用新型的目的在于提供一种取件码垛双功能抓手,中控箱上下两侧分别安装有抓取压铸产品气爪、抓取隔板的真空吸盘,中控箱通过侧面法兰连接杆安装于机器人上,在抓取的过程中,机器人根据抓取物件(压铸产品或隔板),调整双功能抓手的姿态,实现抓取,无需进行抓手来回更换。
2、为实现上述目的,本实用新型提供如下技术方案:
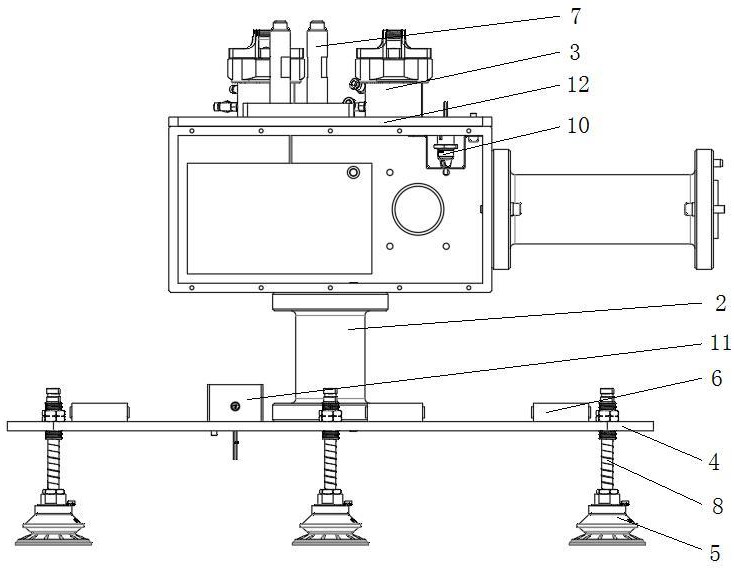
3、一种取件码垛双功能抓手,包括中控箱,中控箱外侧壁上设有与机器人横向相连接的法兰连接杆;中控箱上端面上设有若干个气爪;中控箱下端面通过纵向的法兰连接杆固定有码垛安装板,码垛安装板下方设有若干个真空吸盘,若干个真空吸盘固定安装于码垛安装板四周边缘处,码垛安装板上设有若干个与真空吸盘相连接的真空发生器。
4、本实用新型若干个气爪通过固定板可拆卸安装于中控箱上端面。若干个气爪外侧的固定板上还设有与产品相匹配的定位销。
5、本实用新型若干个气爪均为三指气爪,三指气爪的气缸安装于固定板上,三指气爪的夹爪体位于气缸上方。
6、本实用新型若干个真空吸盘均是通过螺杆安装于码垛安装板上,码垛安装板上下两侧的螺杆上均设有固定螺母。通过螺母可以调整真空吸盘与码垛安装板之间的距离,在搬运隔板过程中,使得产品能够夹在码垛安装板与隔板之间,防止产品晃动。
7、本实用新型中控箱内设有连接外部plc的端子,端子与气爪的气路控制系统、真空发生器相连接。中控箱的侧壁上还设有监测产品到位状态的第一到位传感器,所述码垛安装板上设有监测隔板到位状态的第二到位传感器,气爪上设有监测气爪抓取状态的磁性开关,第一到位传感器、第二到位传感器、磁性开关均与端子相连接。
8、与现有技术相比,本实用新型的有益效果是:
9、1、本实用新型即包含有抓取压铸产品的气爪,又包含抓取放置压铸产品的隔板的真空吸盘,双功能抓手通过法兰连接杆安装于机器人上,当抓取对象由压铸产品变换成放置压铸产品的隔板时,机器人通过旋转调整双功能抓手的姿态,即可实现前后不同抓取对象的抓取,当抓取对象由放置压铸产品的隔板变换成压铸产品也是相同,在这过程中,无需要对抓手来回更换,提高了工作效率。
10、2、本实用新型中控箱内设有连接外部plc的端子,气爪的气路控制系统、真空发生器、第一到位传感器、第二到位传感器、磁性开关均通过端子与外部plc相连接,利用第一到位传感器、第二到位传感器、磁性开关分别感应压铸产品到位状态、隔板到位状态、气爪抓取状态,并控制气爪、真空吸盘进行抓取,提高整个工作流程的自动化程度,进一步提高工作效率。
技术特征:
1.一种取件码垛双功能抓手,其特征在于,包括中控箱,中控箱外侧壁上设有与机器人横向相连接的法兰连接杆;中控箱上端面上设有若干个气爪;
2.根据权利要求1所述取件码垛双功能抓手,其特征在于,所述若干个气爪通过固定板可拆卸安装于中控箱上端面。
3.根据权利要求2所述取件码垛双功能抓手,其特征在于,所述若干个气爪外侧的固定板上还设有与产品相匹配的定位销。
4.根据权利要求2所述取件码垛双功能抓手,其特征在于,所述若干个气爪均为三指气爪,三指气爪的气缸安装于固定板上,三指气爪的夹爪体位于气缸上方。
5.根据权利要求1所述取件码垛双功能抓手,其特征在于,所述若干个真空吸盘均是通过螺杆安装于码垛安装板上,码垛安装板上下两侧的螺杆上均设有固定螺母。
6.根据权利要求1所述取件码垛双功能抓手,其特征在于,所述中控箱内设有连接外部plc的端子,端子与气爪的气路控制系统、真空发生器相连接。
7.根据权利要求6所述取件码垛双功能抓手,其特征在于,所述中控箱的侧壁上还设有监测产品到位状态的第一到位传感器,所述码垛安装板上设有监测隔板到位状态的第二到位传感器,气爪上设有监测气爪抓取状态的磁性开关,第一到位传感器、第二到位传感器、磁性开关均与端子相连接。
技术总结
本技术公开了一种取件码垛双功能抓手,属于机械抓手技术领域,包括中控箱,中控箱外侧壁上设有与机器人相连接的法兰连接杆;中控箱上端面上设有若干个气爪;中控箱下端面通过法兰连接杆固定有码垛安装板,码垛安装板下方设有若干个真空吸盘,若干个真空吸盘固定安装于码垛安装板四周边缘处,码垛安装板上设有若干个与真空吸盘相连接的真空发生器;中控箱上侧气爪、下侧真空吸盘分别用于抓取压铸产品、放置压铸产品的隔板,中控箱通过侧面法兰连接杆安装于机器人上,在抓取的过程中,机器人根据抓取物件(压铸产品或隔板),调整双功能抓手的姿态,实现抓取,无需进行抓手来回更换。
技术研发人员:桑仕星,孙少乾,陈翠彪,张定
受保护的技术使用者:安徽博马智能装备有限公司
技术研发日:20230815
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!