一种搬运夹爪机构及模组加工装置的制作方法
本技术涉及加工装置,具体指一种搬运夹爪机构及模组加工装置。
背景技术:
1、在现有生产线中,对元件的夹持搬运是不可缺少的一环,现有技术中多采用吸盘或能够左右开合的夹爪来进行夹持,但是在此过程中,如果不能精确控制吸盘的吸附力或夹爪的夹持力,则容易出现产品脱落或产品磨损等问题,尤其是针对电池模组等需要精确度较高的产品,在其生产加工过程中的搬运夹持控制一直是影响产品良率的关键因素。
2、此外,由于模组等精密产品的生产数量多、型号差异大,现阶段的相关夹持设备能够一次性搬运的产品数量有限且兼容性差,因此实际搬运效率始终不能很好地满足生产线要求。
技术实现思路
1、为此,本实用新型所要解决的技术问题在于克服现有技术中搬运时产品存在脱落风险、搬运效率低且兼容性差的问题,提供一种搬运夹爪机构及模组加工装置。
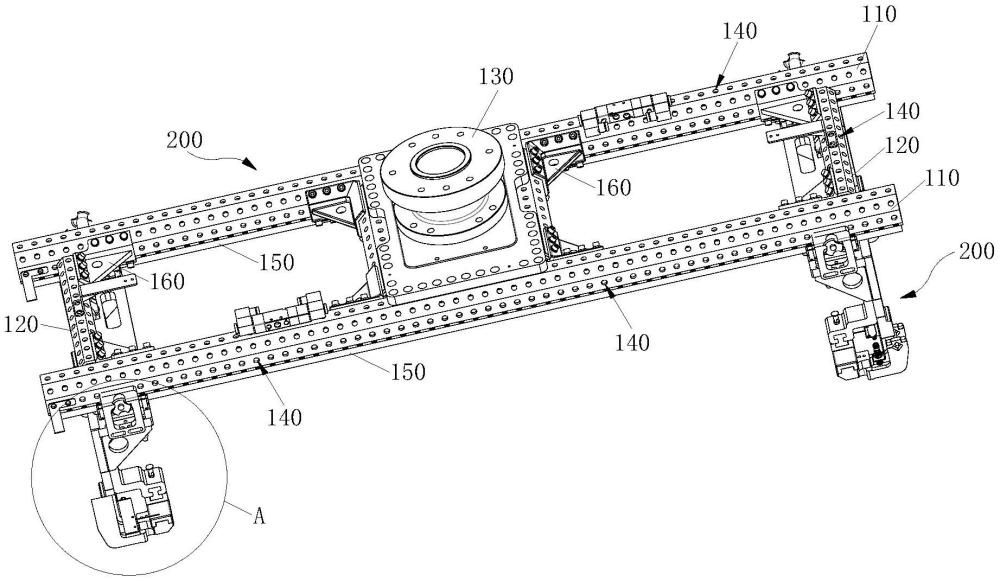
2、为解决上述技术问题,本实用新型提供了一种搬运夹爪机构,包括:连接框,所述连接框上间隔设有多个连接孔;多个夹持组件,任意所述夹持组件均通过相应所述连接孔固定连接于所述连接框,且沿所述连接框移动,所述夹持组件包括沿高度方向设置的第一夹爪及第二夹爪,所述第一夹爪及所述第二夹爪之间为夹持空间,其中,所述第一夹爪中心穿设有沿夹持方向延伸的插接销,所述插接销朝向所述夹持空间移动,所述第二夹爪相对于所述第一夹爪转动。
3、在本实用新型的一个实施例中,所述连接框包括相互垂直连接的横向连接架以及纵向连接架,所述夹持组件还包括第一连接板及第二连接板,所述夹持组件通过所述第一连接板连接所述横向连接架或通过所述第二连接板连接所述纵向连接架。
4、在本实用新型的一个实施例中,所述第一夹爪包括第一主体部及第一夹持部,所述插接销沿高度方向穿设所述第一主体部及所述第一夹持部,所述第一夹持部功能面为水平面。
5、在本实用新型的一个实施例中,所述第二夹爪包括第二主体部、第二夹持部以及转轴,所述转轴绕转动中心线转动,所述第二夹持部一端连接所述第二主体部另一端连接所述转轴,所述第二主体部及所述第二夹持部随所述转轴同步转动。
6、在本实用新型的一个实施例中,所述第二夹爪还包括至少一个转动块,所述第二主体部通过所述转动块连接于所述转轴。
7、在本实用新型的一个实施例中,所述夹持组件还包括感应装置,所述感应装置设置于所述夹持空间一侧,其包括贴合所述夹持空间延伸的感应探针。
8、在本实用新型的一个实施例中,所述连接框中心设有外接端板。
9、在本实用新型的一个实施例中,所述连接框下表面设有滑轨,所述夹持组件沿所述滑轨移动。
10、在本实用新型的一个实施例中,所述夹持组件还包括限位件,所述限位件设置于所述第一夹爪及所述第二夹爪之间。
11、为解决上述技术问题,本实用新型还提供了一种模组加工装置,包括上述搬运夹爪机构、控制系统以及模组加工设备,所述搬运夹爪机构及所述模组加工设备分别连接所述控制系统。
12、本实用新型的上述技术方案相比现有技术具有以下优点:
13、本实用新型所述的搬运夹爪机构,通过沿高度方向设置的第一夹爪及第二夹爪对元件进行支撑夹持,同时通过插接销对元件的夹持位置进行限定,无需对夹持力度进行精确控制也能够实现稳定搬运过程,从根本上杜绝了产品脱落或磨损的风险,此外,本搬运夹爪机构能够实现同时对多个元件的夹持搬运,并且能够兼容不同型号的元件,大幅提高了产品在实际生产加工过程中的搬运效率。
技术特征:
1.一种搬运夹爪机构,其特征在于:包括:
2.根据权利要求1所述的搬运夹爪机构,其特征在于:所述连接框包括相互垂直连接的横向连接架以及纵向连接架,所述夹持组件还包括第一连接板及第二连接板,所述夹持组件通过所述第一连接板连接所述横向连接架或通过所述第二连接板连接所述纵向连接架。
3.根据权利要求1所述的搬运夹爪机构,其特征在于:所述第一夹爪包括第一主体部及第一夹持部,所述插接销沿高度方向穿设所述第一主体部及所述第一夹持部,所述第一夹持部功能面为水平面。
4.根据权利要求1所述的搬运夹爪机构,其特征在于:所述第二夹爪包括第二主体部、第二夹持部以及转轴,所述转轴绕转动中心线转动,所述第二夹持部一端连接所述第二主体部另一端连接所述转轴,所述第二主体部及所述第二夹持部随所述转轴同步转动。
5.根据权利要求4所述的搬运夹爪机构,其特征在于:所述第二夹爪还包括至少一个转动块,所述第二主体部通过所述转动块连接于所述转轴。
6.根据权利要求1所述的搬运夹爪机构,其特征在于:所述夹持组件还包括感应装置,所述感应装置设置于所述夹持空间一侧,其包括贴合所述夹持空间延伸的感应探针。
7.根据权利要求1所述的搬运夹爪机构,其特征在于:所述连接框中心设有外接端板。
8.根据权利要求1所述的搬运夹爪机构,其特征在于:所述连接框下表面设有滑轨,所述夹持组件沿所述滑轨移动。
9.根据权利要求1所述的搬运夹爪机构,其特征在于:所述夹持组件还包括限位件,所述限位件设置于所述第一夹爪及所述第二夹爪之间。
10.一种模组加工装置,其特征在于:包括权利要求1-9中任意一项所述的搬运夹爪机构、控制系统以及模组加工设备,所述搬运夹爪机构及所述模组加工设备分别连接所述控制系统。
技术总结
本技术提供一种搬运夹爪机构,包括:连接框,连接框上间隔设有多个连接孔;多个夹持组件,任意夹持组件均通过相应连接孔固定连接于连接框,且沿连接框移动,夹持组件包括第一夹爪及第二夹爪,第一夹爪中心穿设有沿夹持方向延伸的插接销,插接销朝向夹持空间移动,第二夹爪相对于第一夹爪转动。本机构通过沿高度方向设置的第一夹爪及第二夹爪对元件进行支撑夹持,同时通过插接销对元件的夹持位置进行限定,无需对夹持力度进行精确控制也能够实现稳定搬运过程,从根本上杜绝了产品脱落或磨损的风险,此外,本搬运夹爪机构能够实现同时对多个元件的夹持搬运,并且能够兼容不同型号的元件,大幅提高了产品在实际生产加工过程中的搬运效率。
技术研发人员:请求不公布姓名,请求不公布姓名,请求不公布姓名
受保护的技术使用者:江苏烽禾升智能科技有限公司
技术研发日:20230823
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!