一种机械臂装置的制作方法
本技术属于食品加工相关,具体地说,涉及一种机械臂装置。
背景技术:
1、机械臂装置用于米粉自动化生产过程中的自动检测及有序搬运,生产米粉的工艺要求复杂,环节多样。规模化的米粉生产由多组机头组合构成,再经过长时间的老化、高温复蒸、冷冻、浸泡、松粉、烘干等工艺。机头组和老化,冷冻一般是由多机组构成,且工艺要求时间较长,而高温复蒸、冷冻、浸泡、松粉等中间环节时间较短,且通过单通道线就能满足机头多组的供应,而烘干工艺根据要求,也有可能是单通道线或者是多通道线,所以米粉在生产时,通过人工形式来进行各工艺种各工序之间的搬运。
2、有些厂家通过并杆装置将各个机头组生产的米粉汇聚成一组,并杆装置要求每个机头组的间距必须一致,而且此种工艺要求每个机头组的生产速度必须一致,而每个机头组实际生产的速度不一致,且速度不稳定,即每个机头生产时在出口的速度是不一致的,所以必须还有人为干预来实现。
3、有鉴于此特提出本实用新型。
技术实现思路
1、本实用新型要解决的技术问题在于克服现有技术的不足,提供一种机械臂装置,为解决上述技术问题,本实用新型采用技术方案的基本构思是:
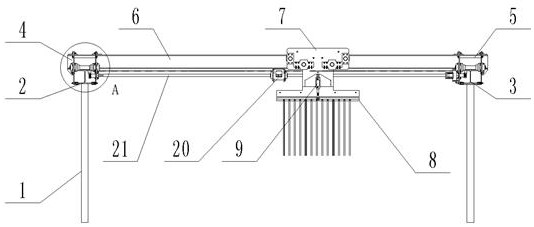
2、一种机械臂装置,包括主支撑架、设置在主支撑架上方的y轴轨道一和y轴轨道二,所述y轴轨道一上安装有y轴运行模组一,所述y轴轨道二上安装有y轴运行模组二,所述y轴运行模组一和所述y轴运行模组二之间通过x轴轨道连接,所述x轴轨道上安装有x轴运行模组,所述x轴运行模组上设置有抓取装置,所述x轴运行模组的中间位置设置有旋转装置,所述旋转装置可以带动所述抓取装置转动。
3、作为本实用新型进一步的方案:所述x轴轨道的下方中间位置固定设置有y轴动力电机,所述y轴动力电机为双动力结构,所述y轴动力电机的两输出轴通过联轴器分别与连接轴相连接,所述连接轴通过轴承支撑结构与所述y轴运行模组一连接,所述y轴动力电机用于给所述y轴运行模组一沿所述y轴轨道一、所述y轴运行模组二沿所述y轴轨道二的移动提供动力支持。
4、作为本实用新型再进一步的方案:所述y轴运行模组一和所述y轴运行模组二同步移动,所述连接轴通过联轴器与齿轮轴相连接,所述y轴轨道一和所述y轴轨道二为h型钢结构,所述y轴轨道一和所述y轴轨道二的内侧腔体面上固定设置有齿条,所述齿条与所述齿轮轴相配合,使y轴运行模组沿y轴轨道移动位置。
5、作为本实用新型再进一步的方案:所述y轴运行模组一和所述y轴运行模组二的下部两内侧安装有导向轮,所述导向轮与y轴轨道的下部卡接配合,用于保证y轴运行模组移动过程的稳定性。
6、作为本实用新型再进一步的方案:所述抓取装置的上部设置有升降气缸,所述抓取装置的下端内侧设置有抓取爪,所述抓取爪为弧形结构设计,用于生产过程中对粉杆的抓取的周转,所述粉杆上挂设有米粉,实现所述米粉的工序自动化流转。
7、作为本实用新型再进一步的方案:所述主支撑架的侧边设置有用于生产工序传递的输入机头组a、输入机头组b、输入机头组c、输入机头组d,每个输入机头组通过输送链条进行所述粉杆的传递,输入机头组之间的位置、间距不受限制,输送链条能将所述粉杆传输至装置的下方位置即可。
8、作为本实用新型再进一步的方案:所述主支撑架的两端头位置与y向平行的方向分别设置有输出位置二和输出位置三,所述主支撑架靠近两端头的位置与x向平行的方向分别设置有输出位置一和输出位置四,所述抓取装置配设有所述旋转装置,可以调节抓取和输送的角度,以满足不同输入、输出工位的生产需求。
9、采用上述技术方案后,本实用新型与现有技术相比具有以下有益效果。
10、本实用新型的机械臂装置,可以灵活地将米粉生产过程中的多机组到单机组,单机组再到多机组实施转运,机械臂每次抓取的数量可以根据机头生产的速度快慢自行控制,多机组之间的距离不受限制,各工序的生产、粉杆的流转过程均为自动化控制,无需人工辅助操作。
11、本实用新型的机械臂装置可以沿y轴轨道、x轴轨道移动,在配合移动的过程中,利用抓取装置进行粉杆的抓取、周转,抓取装置配设有旋转装置,可以调节抓取和输送的角度,以满足不同输入、输出工位的生产需求。
12、下面结合附图对本实用新型的具体实施方式作进一步详细的描述。
技术特征:
1.一种机械臂装置,包括主支撑架(1)、设置在主支撑架(1)上方的y轴轨道一(2)和y轴轨道二(3),其特征在于,所述y轴轨道一(2)上安装有y轴运行模组一(4),所述y轴轨道二(3)上安装有y轴运行模组二(5),所述y轴运行模组一(4)和所述y轴运行模组二(5)之间通过x轴轨道(6)连接,所述x轴轨道(6)上安装有x轴运行模组(7),所述x轴运行模组(7)上设置有抓取装置(8),所述x轴运行模组(7)的中间位置设置有旋转装置(9),所述旋转装置(9)可以带动所述抓取装置(8)转动。
2.根据权利要求1所述的一种机械臂装置,其特征在于,所述x轴轨道(6)的下方中间位置固定设置有y轴动力电机(20),所述y轴动力电机(20)为双动力结构,所述y轴动力电机(20)的两输出轴通过联轴器分别与连接轴(21)相连接,所述连接轴(21)通过轴承支撑结构与所述y轴运行模组一(4)连接。
3.根据权利要求2所述的一种机械臂装置,其特征在于,所述y轴运行模组一(4)和所述y轴运行模组二(5)同步移动,所述连接轴(21)通过联轴器与齿轮轴(22)相连接,所述y轴轨道一(2)和所述y轴轨道二(3)为h型钢结构,所述y轴轨道一(2)和所述y轴轨道二(3)的内侧腔体面上固定设置有齿条(23),所述齿条(23)与所述齿轮轴(22)相配合。
4.根据权利要求3所述的一种机械臂装置,其特征在于,所述y轴运行模组一(4)和所述y轴运行模组二(5)的下部两内侧安装有导向轮(24),所述导向轮(24)与y轴轨道的下部卡接配合。
5.根据权利要求4所述的一种机械臂装置,其特征在于,所述抓取装置(8)的上部设置有升降气缸(25),所述抓取装置(8)的下端内侧设置有抓取爪(26),所述抓取爪(26)为弧形结构设计,用于生产过程中对粉杆(10)的抓取的周转,所述粉杆(10)上挂设有米粉(11)。
6.根据权利要求5所述的一种机械臂装置,其特征在于,所述主支撑架(1)的侧边设置有用于生产工序传递的输入机头组a(12)、输入机头组b(13)、输入机头组c(14)、输入机头组d(15),每个输入机头组通过输送链条进行所述粉杆(10)的传递,输入机头组之间的位置、间距不受限制,输送链条能将所述粉杆(10)传输至装置的下方位置即可。
7.根据权利要求6所述的一种机械臂装置,其特征在于,所述主支撑架(1)的两端头位置与y向平行的方向分别设置有输出位置二(17)和输出位置三(18),所述主支撑架(1)靠近两端头的位置与x向平行的方向分别设置有输出位置一(16)和输出位置四(19)。
技术总结
本技术公开了食品加工相关技术领域的一种机械臂装置,包括主支撑架、设置在主支撑架上方的Y轴轨道一和Y轴轨道二,所述Y轴轨道一上安装有Y轴运行模组一,所述Y轴轨道二上安装有Y轴运行模组二,所述Y轴运行模组一和所述Y轴运行模组二之间通过X轴轨道连接,所述X轴轨道上安装有X轴运行模组,所述X轴运行模组上设置有抓取装置,所述X轴运行模组的中间位置设置有旋转装置,所述旋转装置可以带动所述抓取装置转动。机械臂装置可以沿Y轴轨道、X轴轨道移动,在配合移动的过程中,利用抓取装置进行粉杆的抓取、周转,抓取装置配设有旋转装置,可以调节抓取和输送的角度,以满足不同输入、输出工位的生产需求。
技术研发人员:刘博,杨超
受保护的技术使用者:郑州都固食品机械有限公司
技术研发日:20230830
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!