一种具有精准上下料定位功能的AGV机器人的制作方法
本技术涉及agv机器人相关,具体为一种具有精准上下料定位功能的agv机器人。
背景技术:
1、随着人工智能技术的发展及普及,大量agv机器人应用于货物搬运等作业,以提高车间内物流效率,但是,现有仓库内,货物的存放架基本采用框架结构,这些框架通过多层结构,提高了货物的存放空间,现有agv机器人主要着眼于轮式运动方式,其具有行动快、效率高、稳定性强等优点,而其在高度定位上存在较大缺陷,当其对货物进行提升时,难以保证货物与各层框架对正,这无疑会导致货物的装卸无法进行,为此,我们提出了一种具有精准上下料定位功能的agv机器人。
技术实现思路
1、本实用新型的目的在于提供一种具有精准上下料定位功能的agv机器人,以解决上述背景技术中提出的问题。
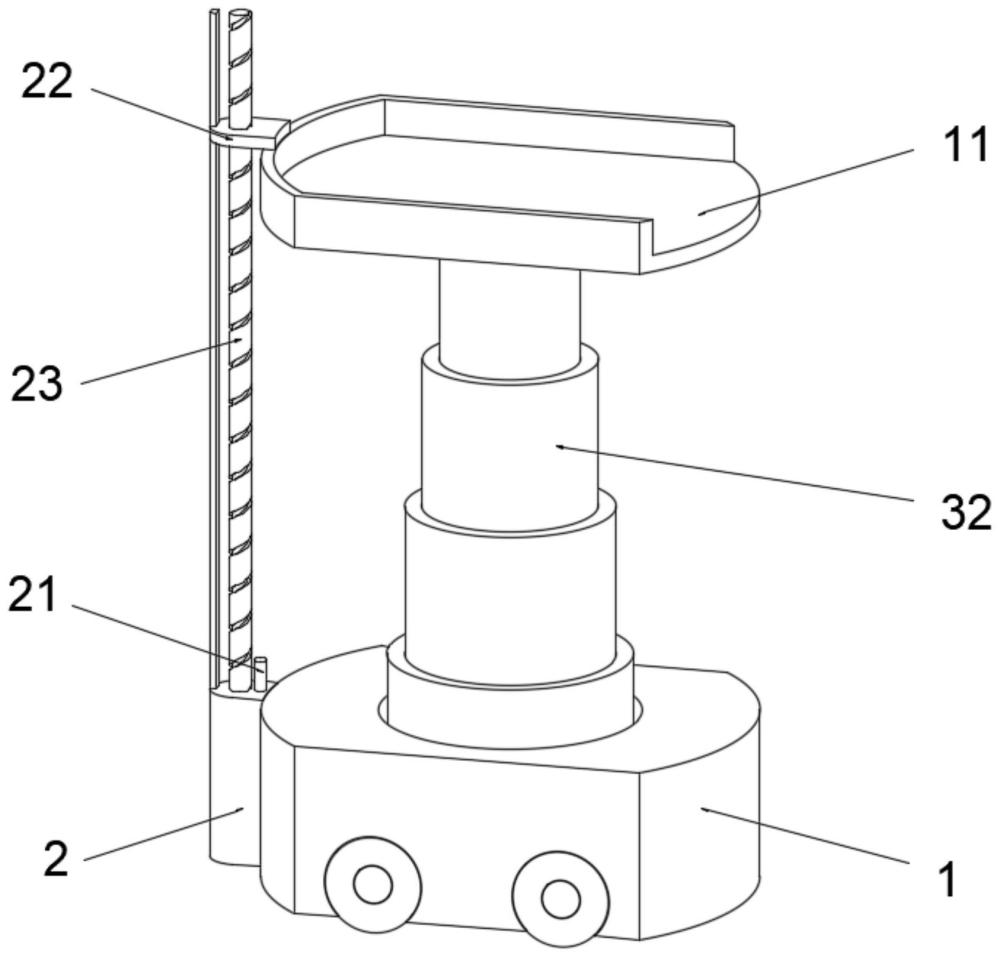
2、为实现上述目的,本实用新型提供如下技术方案:一种具有精准上下料定位功能的agv机器人,包括底座,所述底座上侧设有与其插接配合的载板,所述底座外端面固定安装有第一电机箱,所述第一电机箱上侧设有与其插接的限位板,所述限位板抵接于载板上侧,所述第一电机箱上端面通过其输出轴固定安装有与限位板螺纹配合的螺纹杆,所述第一电机箱上端面固定安装有红外测距仪,所述红外测距仪与限位板中心位于同一竖直轴线上,所述底座内固定安装有与载板配合的第二电机箱,所述底座内固定安装有处理器与蓄电池。
3、优选的,所述限位板远离载板的一侧开设有限位滑槽,所述第一电机箱上端面固定安装有与限位滑槽滑动配合的限位滑轨。
4、优选的,所述底座上端面与载板下端面分别固定安装有第一套筒与第四套筒,所述第一套筒与第四套筒之间设有相互插接的第二套筒及第三套筒。
5、优选的,所述第三套筒内转动安装有与第四套筒内壁螺纹配合的第三螺纹套筒,所述第二套筒内转动安装有与第三套筒螺纹配合的第二螺纹套筒,所述第二电机箱上端面通过其输出轴固定安装有与第二套筒内壁螺纹配合的第一螺纹柱。
6、优选的,所述第一螺纹柱与第二螺纹套筒外围开设有限位插槽,所述第二螺纹套筒与第三螺纹套筒内壁面固定安装有与限位插槽滑动配合的限位插块。
7、与现有技术相比,本实用新型的有益效果是:
8、该一种具有精准上下料定位功能的agv机器人,设置螺纹杆,配合红外测距仪,可以对限位板高度进行精确定位,当第二电机箱驱动载板提升时,通过限位板,可以对载板运动高度进行限制,达到对载板进行精确定位的效果,保证载板能够与各层框架相互对正,保证货物的装卸工作能够稳定进行。
9、该一种具有精准上下料定位功能的agv机器人,通过多个套筒与多个螺纹套筒之间的螺纹配合,可以实现套筒的多级伸缩,可以显著扩大载板上下运动空间,在保证载板提升高度的前提下,可以最大收缩装置的整体空间,便于对装置进行收纳。
技术特征:
1.一种具有精准上下料定位功能的agv机器人,包括底座(1),其特征在于:所述底座(1)上侧设有与其插接配合的载板(11),所述底座(1)外端面固定安装有第一电机箱(2),所述第一电机箱(2)上侧设有与其插接的限位板(22),所述限位板(22)抵接于载板(11)上侧,所述第一电机箱(2)上端面通过其输出轴固定安装有与限位板(22)螺纹配合的螺纹杆(23),所述第一电机箱(2)上端面固定安装有红外测距仪(21),所述红外测距仪(21)与限位板(22)中心位于同一竖直轴线上,所述底座(1)内固定安装有与载板(11)配合的第二电机箱(3),所述底座(1)内固定安装有处理器(13)与蓄电池(12)。
2.根据权利要求1所述的一种具有精准上下料定位功能的agv机器人,其特征在于:所述限位板(22)远离载板(11)的一侧开设有限位滑槽(25),所述第一电机箱(2)上端面固定安装有与限位滑槽(25)滑动配合的限位滑轨(24)。
3.根据权利要求1所述的一种具有精准上下料定位功能的agv机器人,其特征在于:所述底座(1)上端面与载板(11)下端面分别固定安装有第一套筒(31)与第四套筒(34),所述第一套筒(31)与第四套筒(34)之间设有相互插接的第二套筒(32)及第三套筒(33)。
4.根据权利要求3所述的一种具有精准上下料定位功能的agv机器人,其特征在于:所述第三套筒(33)内转动安装有与第四套筒(34)内壁螺纹配合的第三螺纹套筒(331),所述第二套筒(32)内转动安装有与第三套筒(33)螺纹配合的第二螺纹套筒(321),所述第二电机箱(3)上端面通过其输出轴固定安装有与第二套筒(32)内壁螺纹配合的第一螺纹柱(311)。
5.根据权利要求4所述的一种具有精准上下料定位功能的agv机器人,其特征在于:所述第一螺纹柱(311)与第二螺纹套筒(321)外围开设有限位插槽(35),所述第二螺纹套筒(321)与第三螺纹套筒(331)内壁面固定安装有与限位插槽(35)滑动配合的限位插块(36)。
技术总结
本技术具体是一种具有精准上下料定位功能的AGV机器人,包括底座,所述底座上侧设有与其插接配合的载板,所述底座外端面固定安装有第一电机箱,所述第一电机箱上侧设有与其插接的限位板,所述限位板抵接于载板上侧,所述第一电机箱上端面通过其输出轴固定安装有与限位板螺纹配合的螺纹杆,所述第一电机箱上端面固定安装有红外测距仪,所述红外测距仪与限位板中心位于同一竖直轴线上,所述底座内固定安装有与载板配合的第二电机箱,所述限位板远离载板的一侧开设有限位滑槽,所述第一电机箱上端面固定安装有与限位滑槽滑动配合的限位滑轨,本技术可以对载板进行精准定位,便于在载板上端,对货物进行存取。
技术研发人员:李苏琼,李保森,周书艳
受保护的技术使用者:苏州永硕智能科技有限公司
技术研发日:20231017
技术公布日:2024/4/22
- 还没有人留言评论。精彩留言会获得点赞!