用于钽电容自动化生产的自动上料手爪的制作方法
本发明属于自动化设备领域,特别涉及一种用于钽电容自动化生产的自动上料手爪。
背景技术:
1、钽电容器是一种用金属钽(ta)作为阳极材料而制成的,钽(ta)材料由于具有诸如较高的熔点、优异的柔韧性和耐腐蚀性等的机械物理特性而广泛应用于诸如电气、电子、机械、化工、航天、国防和其它工业的各个工业领域。这种钽(ta)材料由于能够形成稳定的阳极氧化膜的特性而被广泛用作小型电容器的正极材料,并且其年使用量随着近年来诸如电子和信息通信的信息技术(it)工业的快速发展而迅速增加。
2、现有的钽电容在整个生产作业的过程中,首先需要将钽电容的pcb板放置治具中,再把治具放入料框中的进行上料作业,随后设备再将完成上料pcb板转移至后续的工序进行树脂封装等系列加工工艺处理。
3、目前现有的加工工艺是先将放置有钽电容的pcb板的治具装入料框中,装入料框的治具再生产过程中需要转运,且在后续过程中还要将料框中装有pcb板的治具取出,进行后续的加工作业,现有技术采用的是人工插拔插销的方式来实现料框锁治具和开治具,操作过程费事费力,且无法满足自动化生产的要求。
4、基于上述问题,设计一种能满足钽电容自动化生产过程中自动上料和抓取转移设备,能够满足钽电容料自动化生产要求的设备成为目前亟待解决的问题。
技术实现思路
1、本发明的目的在于提供一种用于钽电容自动化生产的自动上料手爪,通过结构上的优化,实现了钽电容pcb板的自动上料和抓取,实现了钽电容生产自动化,满足了自动化生产的要求。
2、在本申请的一个方面,提供一种用于钽电容自动化生产的自动上料手爪,用于对钽电容pcb板上料和抓取转移,包括旋转气缸, 旋转气缸的缸体一侧设置连接块,缸体的另一侧旋转端设置连接板,所述连接块一侧设置上粉模组,用于pcb板自动上料;所述连接板一端设置定位抓取模组,用于自动抓取上料完成的pcb板。
3、本申请除具有上述改进外,还在如下方面做了优化设计:
4、在一些实施例中,所述连接块包括方形连接块和横向安装板,方形连接块用于连接机械臂,横向安装板安装固定在方形连接块的一侧,方向连接块与横向安装板之间设置加强筋板。
5、在一些实施例中,所述上粉模组包括放粉手抓、放粉上板和放粉板以及驱动放粉板动作的气缸杆模组;
6、在一些实施例中,所述放粉上板盖合在放粉手抓上,放粉手抓、放粉上板均开设有放粉口,放粉手抓、放粉上板的放粉口对应设置形成贯穿的放粉通道;
7、在一些实施例中,所述放粉手抓上开有放粉槽,所述放粉槽设置为两个,所述放粉槽为u型通槽,所述的放粉板安装在放粉槽内;
8、在一些实施例中,所述放粉板的一端通过连接块与气缸杆模组的活塞杆连接,气缸杆模组驱动放料板沿放料槽来回滑动,所述放粉板上设置放粉口,放粉板上设置放粉口与放粉手抓和放粉上板上设置的放粉口一一对应设置,通过气缸杆模组驱动放粉板在放粉槽内滑动,可以实现三个放粉口的贯通,或调节放粉量大的大小,或关闭放粉口。
9、在一些实施例中,所述的定位抓取模组包括吸盘模组连接板和吸盘模组,所述吸盘模组安装在吸盘模组连接板的一端,所述吸盘模组连接板的另一端连接在旋转气缸的旋转端一侧。
10、在一些实施例中,所述吸盘模组包括吸盘转运机构和吸盘定位机构,吸盘转运机构和吸盘定位机构对应安装在吸盘模组连接板上;
11、在一些实施例中,所述吸盘转运机构包括吸盘固定板和设置在吸盘固定板上的吸盘,所述吸盘设置为四个分布在吸盘固定板上的不同位置处。
12、在一些实施例中,所述吸盘定位机构包括吸盘安装架,所述吸盘安装架上安装有吸盘和定位柱,所述吸盘安装架上设置四组吸盘和定位柱,分布在吸盘安转架的不同位置处。
13、本发明的有益效果是:
14、本发明一种用于钽电容自动化生产的自动上料手爪,在旋转气缸的缸体的缸体分别设置上粉模组和定位抓取模组,实现了钽电容pcb板的自动上料和上料后的自动转移抓取,整个上料和转移过程无需人工参与,自动化程度高,满足了钽电容自动化生产的要求,提升了生产效率,节约的人工成本。
技术特征:
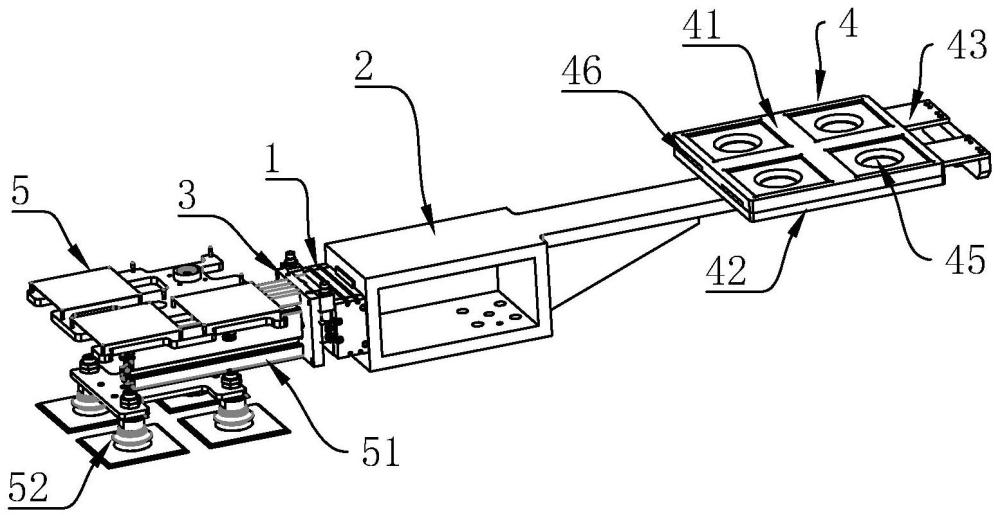
1.一种用于钽电容自动化生产的自动上料手爪,用于对钽电容pcb板上料和抓取转移,其特征在于,包括旋转气缸(1), 旋转气缸(1)的缸体一侧设置连接块(2),缸体的另一侧旋转端设置连接板(3),所述连接块(2)一侧设置上粉模组(4),用于pcb板自动上料;所述连接板(3)一端设置定位抓取模组(5),用于自动抓取上料完成的pcb板。
2.根据权利要求1所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述连接块(2)包括方形连接块(2)和横向安装板,方形连接块(2)用于连接机械臂,横向安装板安装固定在方形连接块(2)的一侧,方向连接块(2)与横向安装板之间设置加强筋板。
3.根据权利要求1所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述上粉模组(4)包括放粉手抓(41)、放粉上板(42)和放粉板(43)以及驱动放粉板(43)动作的气缸杆模组(44)。
4.根据权利要求3所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述放粉上板(42)盖合在放粉手抓(41)上,放粉手抓(41)、放粉上板(42)均开设有放粉口(45),放粉手抓(41)、放粉上板(42)的放粉口(45)对应设置形成贯穿的放粉通道。
5.根据权利要求3所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述放粉手抓(41)上开有放粉槽(46),所述放粉槽(46)设置为两个,所述放粉槽(46)为u型通槽,所述的放粉板(43)安装在放粉槽(46)内。
6.根据权利要求3所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述放粉板(43)的一端通过连接块(2)与气缸杆模组(44)的活塞杆连接,气缸杆模组(44)驱动放料板沿放料槽来回滑动,所述放粉板(43)上设置放粉口(45),放粉板(43)上设置放粉口(45)与放粉手抓(41)和放粉上板(42)上设置的放粉口(45)一一对应设置,通过气缸杆模组(44)驱动放粉板(43)在放粉槽(46)内滑动,可以实现三个放粉口(45)的贯通,或调节放粉量大的大小,或关闭放粉口(45)。
7.根据权利要求1所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述的定位抓取模组(5)包括吸盘模组连接板(51)和吸盘模组(52),所述吸盘模组(52)安装在吸盘模组连接板(51)的一端,所述吸盘模组连接板(51)的另一端连接在旋转气缸(1)的旋转端一侧。
8.根据权利要求7所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述吸盘模组(52)包括吸盘转运机构(521)和吸盘定位机构(522),吸盘转运机构(521)和吸盘定位机构(522)对应安装在吸盘模组连接板(51)上。
9.根据权利要求8所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述吸盘转运机构(521)包括吸盘固定板(5211)和设置在吸盘固定板上的吸盘(5212),所述吸盘设置为四个分布在吸盘固定板上的不同位置处。
10.根据权利要求8所述的用于钽电容自动化生产的自动上料手爪,其特征在于,所述吸盘定位机构(522)包括吸盘安装架(5221),所述吸盘安装架上安装有吸盘和定位柱(5222),吸盘和定位柱分布在吸盘安转架的不同位置处。
技术总结
本发明一种用于钽电容自动化生产的自动上料手爪,用于对钽电容PCB板上料和抓取转移,包括旋转气缸,旋转气缸的缸体一侧设置连接块,缸体的另一侧旋转端设置连接板,所述连接块一侧设置上粉模组,用于PCB板自动上料;所述连接板一端设置定位抓取模组,用于自动抓取上料完成的PCB板。所述上粉模组包括放粉手抓、放粉上板和放粉板以及驱动放粉板动作的气缸杆模组。所述放粉上板盖合在放粉手抓上,放粉手抓、放粉上板均开设有放粉口,所述放粉手抓上开有放粉槽,气缸杆模组驱动放料板沿放料槽来回滑动,可以实现放粉。本申请实现了钽电容PCB板的自动上料和自动转移抓取,自动化程度高,满足了钽电容自动化生产的要求,提升了生产效率,节约的人工成本。
技术研发人员:李祥艳,韩国哲
受保护的技术使用者:深圳市鑫台铭智能装备股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!