一种轨道梁起重装置及起重方法与流程
本发明涉及起重,具体涉及一种轨道梁起重装置及起重方法。
背景技术:
1、矿下使用轨道梁的作用主要是为矿井中的轨道运输提供支撑和固定,确保运输系统的稳定性和安全性,在轨道梁的安装过程中,通常会使用起重装置将轨道梁移动至安装位置。
2、公告号为cn110642164b的中国专利文件中公开了一种折臂伸缩式起重,包括基柱、回转机构、塔身、水平伸缩机构、水平摆动机构、竖直伸缩机构、主臂变幅油缸、折臂变幅油缸和机械手;水平伸缩机构包括内臂、外臂和伸缩油缸,外臂可滑动地套设在内臂外,内臂的第一端从外臂的第一端伸出,伸缩油缸的缸体与外臂固定连接,伸缩油缸的活塞杆与内臂固定连接;水平摆动机构包括摆动臂和摆动油缸,摆动油缸的伸缩平面与主臂变幅油缸的伸缩平面垂直;竖直伸缩机构的结构与水平伸缩机构的结构相同,折臂变幅油缸的伸缩平面与主臂变幅油缸的伸缩平面平行或者重合;机械手固定在水平伸缩机构内臂的第一端上,长度较短的轨道梁在安装之前会放置在矿洞地面上,且轨道梁的安装面朝向设定方向,从而方便对轨道梁进行起重、安装,然而,操作人员在不熟练的情况下,会将机械手上的两个机械爪伸开至最大,然后将机械爪移动至待安装的轨道梁处,以使轨道梁位于两个机械爪之间,因两个机械爪是同步向内移动,并抓取轨道梁的,一旦轨道梁过于靠近其中一个机械爪,则两个机械爪同步向内移动抓取轨道梁时,靠近轨道梁的机械爪容易推动轨道梁并使其倾倒,从而导致轨道梁的安装面脱离设定方向,容易降低对轨道梁的安装效率。
技术实现思路
1、本发明提供一种轨道梁起重装置及起重方法,旨在解决相关技术中机械爪容易推动轨道梁并使其倾倒,从而导致轨道梁的安装面脱离设定方向的问题。
2、本发明的轨道梁起重装置,包括:驱动单元;抓取单元,连接在所述驱动单元上,所述抓取单元包括第一机械爪和第二机械爪,所述第一机械爪和所述第二机械爪能够同步相互靠近并抓取轨道梁,所述第一机械爪上转动连接有第一齿轮和抬升部,所述第一机械爪上连接有第二自动伸缩部,所述第一齿轮上连接有第一拨动臂,所述第二自动伸缩部的伸缩端上连接有第一齿板和下压部,所述第一齿板与所述第一齿轮啮合连接,所述第一齿板下移与第一齿轮啮合转动,以使所述第一拨动臂拨动轨道梁倾斜,从而使所述抬升部能够伸入至轨道梁的底部,所述第一机械爪滑动连接有第二齿板,所述第一机械爪上转动连接有第三齿轮,所述第三齿轮上连接有第二拨动臂,所述第一齿板下移,能够带动所述第二齿板与所述第三齿轮啮合传动,以使所述第二拨动臂拨动轨道梁朝向所述第一机械爪处倾斜,同时由下移的所述下压部驱动所述抬升部翻转,并将轨道梁抬起。
3、优选的,所述抓取单元还包括安装架,所述安装架上设置有第一滑槽,所述第一滑槽的内壁两侧分别设置有第二滑槽和第三滑槽,所述第二滑槽和所述第三滑槽均与所述第一滑槽垂直设置,且所述第二滑槽和所述第三滑槽之间呈平行设置。
4、优选的,所述安装架的内侧连接有第一自动伸缩部,所述第一自动伸缩部的伸缩端连接有第一滑块,所述第一滑块滑动连接在第一滑槽内,所述第二滑槽内滑动连接有第二滑块,所述第三滑槽内滑动连接有第三滑块,所述第二滑块与所述第一滑块之间活动连接有第一连杆,所述第三滑块与所述第一滑块之间活动连接有第二连杆,所述第一机械爪连接在所述第二滑块上,所述第二机械爪连接在所述第三滑块上。
5、优选的,所述第一机械爪上连接有滑轨和支撑臂,所述第二齿板滑动连接在所述滑轨内,所述第三齿轮转动连接在所述滑轨上,所述支撑臂上连接有滚轮和第二齿轮,所述滚轮与所述第一齿板紧密接触,所述第二齿轮与所述第二齿板啮合连接,所述滚轮和所述第二齿轮上均连接有传动轮,两个所述传动轮之间连接有传动带。
6、优选的,所述抬升部与所述第一机械爪之间连接有弹性部。
7、优选的,所述第二拨动臂上连接有连接部,所述连接部上设置有通槽,所述第二自动伸缩部的伸缩端贯穿所述通槽,所述第二自动伸缩部的伸缩端上连接有阻挡部,且所述阻挡部的顶部与所述连接部的底部相接触,所述下压部位于所述连接部的上方。
8、优选的,所述第一机械爪上设置有第一安装口和第二安装口,所述第一齿轮转动连接在所述第一安装口内,所述抬升部转动连接在所述第二安装口内。
9、优选的,所述驱动单元上连接有移动单元,用于带动所述驱动单元移动至轨道梁附近。
10、优选的,所述移动单元上连接有控制单元,用于控制所述移动单元、所述驱动单元和所述抓取单元的运行。
11、本发明还提供了一种轨道梁起重方法,其包括如下步骤:
12、s1:启动驱动单元带动抓取单元移动至轨道梁处,同时使轨道梁靠近第一机械爪;
13、s2:启动抓取单元,控制第一机械爪和第二机械爪同步相互靠近;
14、s3:启动第二自动伸缩部带动第一齿板下移并与第一齿轮啮合传动,第一齿轮转动带动第一拨动臂拨动轨道梁倾斜,同时由第一机械爪带动抬升部伸入至轨道梁的底部;
15、s4:第一齿板下移推动第二齿板,第二齿板与第三齿轮啮合传动,并带动第二拨动臂靠近轨道梁,在第一拨动臂与轨道梁分离后,由第二拨动臂拨动轨道梁向第一机械爪处倾斜,同时下压部下移推动抬升部翻转,并将轨道梁抬起;
16、s5:第一机械爪带动轨道梁移动,第一机械爪和第二机械爪继续同步相互靠近,直至第一机械爪和第二机械爪对轨道梁抓取固定。
17、本发明的有益效果是:
18、在使用时,通过第一拨动臂拨动轨道梁倾斜,并在第一机械爪的带动下使抬升部伸入至轨道梁的底部,然后通过第二拨动臂反向拨动轨道梁,同时由抬升部将轨道梁抬起,以使第一机械爪带动轨道梁移动,直至第一机械爪和第二机械爪对轨道梁抓取固定,以避免轨道梁的安装面脱离设定方向。
技术特征:
1.一种轨道梁起重装置,其特征在于,包括:
2.根据权利要求1所述的轨道梁起重装置,其特征在于,所述抓取单元(3)还包括安装架(31),所述安装架(31)上设置有第一滑槽(311),所述第一滑槽(311)的内壁两侧分别设置有第二滑槽(312)和第三滑槽(313),所述第二滑槽(312)和所述第三滑槽(313)均与所述第一滑槽(311)垂直设置,且所述第二滑槽(312)和所述第三滑槽(313)之间呈平行设置。
3.根据权利要求2所述的轨道梁起重装置,其特征在于,所述安装架(31)的内侧连接有第一自动伸缩部(331),所述第一自动伸缩部(331)的伸缩端连接有第一滑块(334),所述第一滑块(334)滑动连接在第一滑槽(311)内,所述第二滑槽(312)内滑动连接有第二滑块(332),所述第三滑槽(313)内滑动连接有第三滑块(333),所述第二滑块(332)与所述第一滑块(334)之间活动连接有第一连杆(335),所述第三滑块(333)与所述第一滑块(334)之间活动连接有第二连杆(336),所述第一机械爪(337)连接在所述第二滑块(332)上,所述第二机械爪(338)连接在所述第三滑块(333)上。
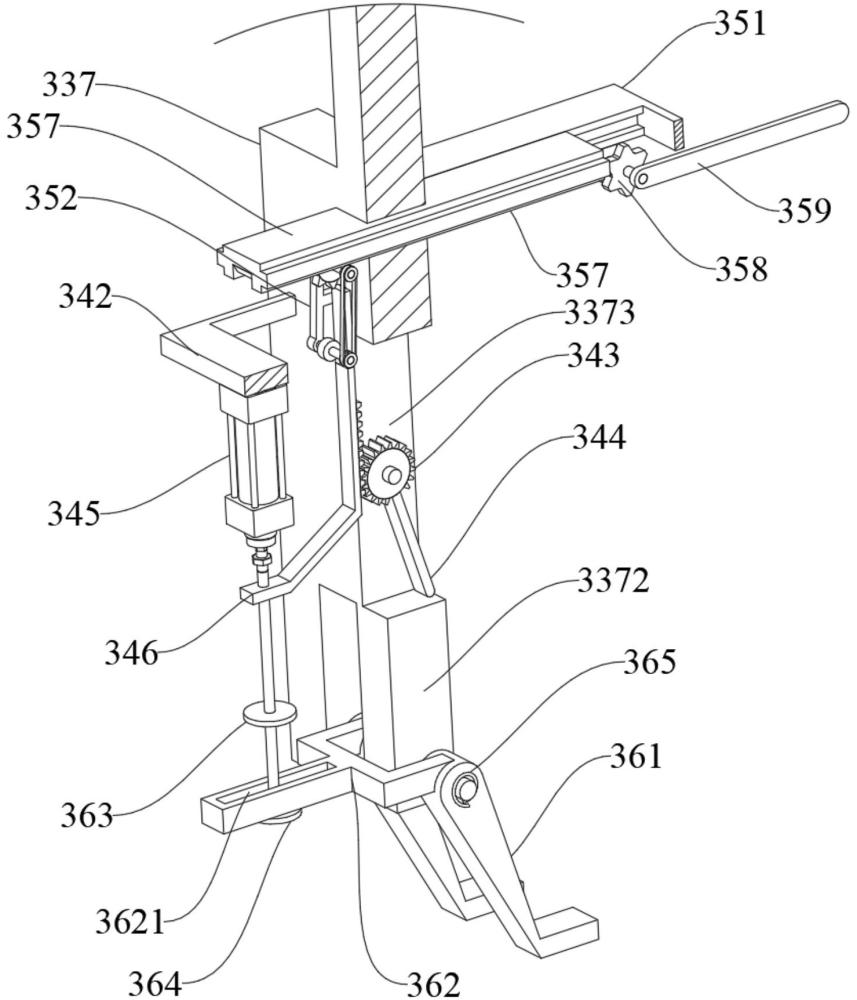
4.根据权利要求1所述的轨道梁起重装置,其特征在于,所述第一机械爪(337)上连接有滑轨(351)和支撑臂(352),所述第二齿板(357)滑动连接在所述滑轨(351)内,所述第三齿轮(358)转动连接在所述滑轨(351)上,所述支撑臂(352)上连接有滚轮(353)和第二齿轮(354),所述滚轮(353)与所述第一齿板(346)紧密接触,所述第二齿轮(354)与所述第二齿板(357)啮合连接,所述滚轮(353)和所述第二齿轮(354)上均连接有传动轮(355),两个所述传动轮(355)之间连接有传动带(356)。
5.根据权利要求1所述的轨道梁起重装置,其特征在于,所述抬升部(361)与所述第一机械爪(337)之间连接有弹性部(365)。
6.根据权利要求1所述的轨道梁起重装置,其特征在于,所述第二拨动臂(359)上连接有连接部(362),所述连接部(362)上设置有通槽(3621),所述第二自动伸缩部(345)的伸缩端贯穿所述通槽(3621),所述第二自动伸缩部(345)的伸缩端上连接有阻挡部(364),且所述阻挡部(364)的顶部与所述连接部(362)的底部相接触,所述下压部(363)位于所述连接部(362)的上方。
7.根据权利要求1所述的轨道梁起重装置,其特征在于,所述第一机械爪(337)上设置有第一安装口(3371)和第二安装口(3372),所述第一齿轮(343)转动连接在所述第一安装口(3371)内,所述抬升部(361)转动连接在所述第二安装口(3372)内。
8.根据权利要求1所述的轨道梁起重装置,其特征在于,所述驱动单元(2)上连接有移动单元(1),用于带动所述驱动单元(2)移动至轨道梁附近。
9.根据权利要求8所述的轨道梁起重装置,其特征在于,所述移动单元(1)上连接有控制单元(6),用于控制所述移动单元(1)、所述驱动单元(2)和所述抓取单元(3)的运行。
10.一种轨道梁起重方法,其特征在于,利用上述权利要求1-9任一项所述的轨道梁起重装置,其包括如下步骤:
技术总结
本发明涉及起重技术领域,具体公开了一种轨道梁起重装置及起重方法,包括:第一机械爪和第二机械爪,第一机械爪上转动连接有第一齿轮和抬升部,第一机械爪上连接有第二自动伸缩部,第一齿轮上连接有第一拨动臂,第一拨动臂能够拨动轨道梁倾斜,抬升部能够伸入至轨道梁的底部,第一机械爪上转动连接有第三齿轮,第三齿轮上连接有第二拨动臂,第二拨动臂拨动轨道梁朝向第一机械爪处倾斜,同时由下压部驱动抬升部翻转,并将轨道梁抬起;本发明的轨道梁起重装置及起重方法,通过第一拨动臂拨动轨道梁,以使抬升部伸入至轨道梁的底部,通过第二拨动臂反向拨动轨道梁,由抬升部将轨道梁抬起,避免轨道梁的安装面脱离设定方向。
技术研发人员:万顺,王雪松,刘磊,孙培成
受保护的技术使用者:泰安万川电器设备有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!