一种新型的单轴机器人中间剪断及翻转取料装置的制作方法
:
1.本实用新型涉及剪切装置技术领域,尤其涉及一种新型的单轴机器人中间剪断及翻转取料装置。
背景技术:
2.目前塑胶气泡受成型工艺影响,塑胶气泡在成型时无法直接成型为标准品,会产生多余的成型物料,在后期加工切除水口后,因标准品要求,还需要将塑胶气泡从中间剪断,使前后两端长度一致。现有中间剪断装置通常采用治具固定塑胶气泡的一端后对中间进行剪切,然后通过人工将剪切好的物料放置在下个工位进行装配,此方式效率过低且容易造成前后两端长度差别较大,无法满足使用要求,因此,提高塑胶气泡的中间剪断及翻转取料效率显得极为重要。
技术实现要素:
3.本实用新型要解决的技术问题是提供一种新型的单轴机器人中间剪断及翻转取料装置,应用该实用新型实现塑胶气泡的中间剪断及翻转取料工艺。
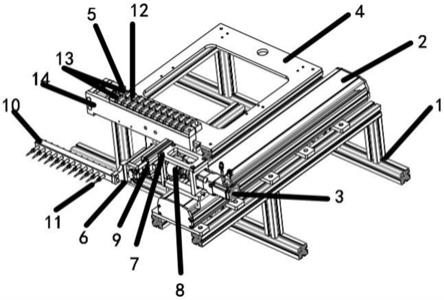
4.2、本实用新型实施例提供的一种新型的单轴机器人中间剪断及翻转取料装置,其包括:机架1、直线机器人2、旋转伺服电机3、底板4、中间剪断机构5、定位取料机构6,所述机架1设于整个设备下方,作为安装支撑框架,所述直线机器人2设于机架1上方右侧,所述旋转伺服电机3设于直线机器人2上部,所述底板4设于机架1 上方,位于所述中间剪断机构5下方,所述定位取料机构6与旋转伺服电机3相连。
5.可选地,所述旋转伺服电机3通过旋转伺服电机安装板7及轴承座8与定位取料机构6相固定连接。
6.可选地,所述中间剪断机构5上方设有放料槽12,由前后中间剪断模13组成,所述前后中间剪断模13下方分别设有中间剪刀座 14和移动剪刀座15,所述移动剪刀座15连接有剪刀片18;
7.所述中间剪断机构5左侧设有剪刀气缸16,所述中间剪刀座14 侧面下方固定有三轴气缸17、滑台20和滑台座21,中间连接座19 位于所述三轴气缸17上方和所述中间剪断模13的下方位置。
8.可选地,所述定位取料机构6由滑台气缸9、固定杆10、上料柱 11组成,所述上料柱11嵌入所述固定杆10中,所述固定杆10与滑台气缸9相连接。
附图说明
9.此处说明的附图用来提供对本实用新型的进一步理解。
10.图1是本实用新型实施例1提供的一种新型的单轴机器人中间剪断及翻转取料装置的立体结构示意图。
11.图2是本实用新型实施例1提供的一种新型的单轴机器人中间剪断及翻转取料装
置的中间剪断机构的侧边结构示意图。
12.附图标记:
13.1:机架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2:直线机器人
ꢀꢀꢀꢀ
3:旋转伺服电机
14.4:底板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
5:中间剪断机构
ꢀꢀꢀ
6:定位取料机构
15.7:旋转伺服电机安装板
ꢀꢀ
8:轴承座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
9:滑台气缸
16.10:固定杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11:上料柱
ꢀꢀꢀꢀꢀꢀꢀꢀ
12:放料槽
17.13:中间剪断模
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14:中间剪刀座
ꢀꢀꢀꢀ
15:移动剪刀座
18.16:剪刀气缸
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
17:三轴气缸
ꢀꢀꢀꢀꢀꢀ
18:剪刀片
19.19:中间连接座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20:滑台
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21:滑台座
具体实施方式:
20.下面将结合附图以及具体实施例来详细说明本实用新型,在此本实用新型的示意性实施例以及说明用来解释本实用新型,但并不作为本实用新型的限定。
21.实施例1
22.3、参见图1、图2所示,本实用新型实施例提供的一种新型的单轴机器人中间剪断及翻转取料装置,其包括:机架1、直线机器人2、旋转伺服电机3、底板4、中间剪断机构5、定位取料机构6,所述机架1设于整个设备下方,作为安装支撑框架,所述直线机器人2设于机架1上方右侧,所述旋转伺服电机3设于直线机器人2上部,所述底板4设于机架1上方,位于所述中间剪断机构5下方,所述定位取料机构6与旋转伺服电机3相连。
23.所述旋转伺服电机3通过旋转伺服电机安装板7及轴承座8与定位取料机构6相固定连接。
24.所述中间剪断机构5上方设有放料槽12,由前后中间剪断模13 组成,所述前后中间剪断模13下方分别设有中间剪刀座14和移动剪刀座15,所述移动剪刀座15连接有剪刀片18;
25.所述中间剪断机构5左侧设有剪刀气缸16,所述中间剪刀座14 侧面下方固定有三轴气缸17、滑台20和滑台座21,中间连接座19 位于所述三轴气缸17上方和所述中间剪断模13的下方位置。
26.所述定位取料机构(6)由滑台气缸(9)、固定杆(10)、上料柱(11)组成,所述上料柱(11)嵌入所述固定杆(10)中,所述固定杆(10)与滑台气缸(9)相连接。
27.该设备的工作原理是:开始工作时,工人启动设备,将塑胶气泡放置在中间剪断机构5中的放料槽12中,放料槽12由前后中间剪断模13组成,此时三轴气缸17和剪刀气缸16开始动作,通过滑台20、滑台座21带动移动剪刀座15运动,移动剪刀座15连接着剪刀片18,同时带动剪刀片18动作,将塑胶气泡从中间剪断,此时旋转伺服电机3向上旋转90
°
,直线机器人2开始向里移动到设定好的距离,同时旋转伺服电机3向下旋转90
°
与放料槽12处于水平状态,直线机器人2缓慢移动,将上料柱11插入塑胶气泡中,完成取料,此时直线机器人2向后移动,旋转伺服电机3再向上旋转90
°
,直线机器人2向前移动到原始位置,再向上旋转90
°
,此时工人将完成的物料取出,取出后,旋转伺服电机3往后向下旋转90
°
,直线机器人2向后移动到指定位置与放料槽12处于水平状态,直线机器人2 缓慢向后移动,将上料柱11插入塑胶气泡中,完成取料,此时直线机器人2向前移动,旋转伺服电机3再向上旋转90
°
,此
时工人将物料取出,旋转伺服电机3再向下旋转90
°
回归原始状态,完成一次操作,重复上述运动。所述一种新型的单轴机器人中间剪断及翻转取料装置可以快速实现塑胶气泡的中间剪断及取料工艺,提高工作效率。
28.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理;同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种新型的单轴机器人中间剪断及翻转取料装置,其特征在于:其包括:机架(1)、直线机器人(2)、旋转伺服电机(3)、底板(4)、中间剪断机构(5)、定位取料机构(6),所述机架(1)设于整个设备下方,作为安装支撑框架,所述直线机器人(2)设于机架(1)上方右侧,所述旋转伺服电机(3)设于直线机器人(2)上部,所述底板(4)设于机架(1)上方,位于所述中间剪断机构(5)下方,所述定位取料机构(6)与旋转伺服电机(3)相连。2.根据权利要求1所述的一种新型的单轴机器人中间剪断及翻转取料装置,其特征在于:所述旋转伺服电机(3)通过旋转伺服电机安装板(7)及轴承座(8)与定位取料机构(6)相固定连接。3.根据权利要求1所述的一种新型的单轴机器人中间剪断及翻转取料装置,其特征在于:所述中间剪断机构(5)上方设有放料槽(12),由前后中间剪断模(13)组成,所述前后中间剪断模(13)下方分别设有中间剪刀座(14)和移动剪刀座(15),所述移动剪刀座(15)连接有剪刀片(18);所述中间剪断机构(5)左侧设有剪刀气缸(16),所述中间剪刀座(14)侧面下方固定有三轴气缸(17)、滑台(20)和滑台座(21),中间连接座(19)位于所述三轴气缸(17)上方和所述中间剪断模(13)的下方位置。4.根据权利要求1所述的一种新型的单轴机器人中间剪断及翻转取料装置,其特征在于:所述定位取料机构(6)由滑台气缸(9)、固定杆(10)、上料柱(11)组成,所述上料柱(11)嵌入所述固定杆(10)中,所述固定杆(10)与滑台气缸(9)相连接。
技术总结
本实用新型涉及剪切装置技术领域,提出一种新型的单轴机器人中间剪断及翻转取料装置,其主要包括:机架1、直线机器人2、旋转伺服电机3、底板4、中间剪断机构5、定位取料机构6,所述机架1设于整个设备下方,作为安装支撑框架,所述直线机器人2设于机架1上方右侧,所述旋转伺服电机3设于直线机器人2上部,所述底板4设于机架1上方,位于所述中间剪断机构5下方,所述定位取料机构6与旋转伺服电机3相连。本实用新型结构新颖,应用本实用新型可以快速实现塑胶气泡的中间剪断及取料工艺,提高工作效率。提高工作效率。提高工作效率。
技术研发人员:罗中元 张胜 李兰云 邹光富
受保护的技术使用者:广东若铂智能机器人有限公司
技术研发日:2021.05.06
技术公布日:2022/2/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1