一种吹瓶机无吊环瓶胚自动剔除装置的制作方法
1.本实用新型属于吹瓶机技术领域,具体涉及一种吹瓶机无吊环瓶胚自动剔除装置。
背景技术:
2.吹瓶机上瓶胚自动上吊环时,会因各种原因出现有个别瓶胚无吊环的现象,之前一直采用人工看护,发现无吊环的瓶胚时,人工按装吊环或剔除无吊环瓶胚,有时操作不及时会漏掉不少无吊环瓶胚,造成人员和物料的浪费;为了提高抓取的速率,常规的机械手指,并排排列十个以上,由一个伸缩装置和升降装置控制,不能单独控制其中一个机械手指。
技术实现要素:
3.针对现有技术存在的问题,本实用新型提供了一种吹瓶机无吊环瓶胚自动剔除装置,能够自动剔除并传回上胚料斗重新再利用,实现了无人操作,即能减少物料损耗,又降低了人工成本。
4.本实用新型的技术方案具体如下:
5.一种吹瓶机无吊环瓶胚自动剔除装置,包括吹瓶机和机械手指,吹瓶机上的随行轨道的外侧设置第一机械手指,随行轨道内侧在吹瓶机上设置与第一机械手指对应的第一感应器,第一感应器的高度与瓶胚上的吊环高度一致;第一机械手指连接伸缩机构,伸缩机构连接升降机构,升降机构设置在吹瓶机上,第一感应器、伸缩机构和升降机构电连接控制系统;第一机械手指的下方设置有传送带,传送带的一端连接上胚料斗。
6.优选地,随行轨道的运行方向的第一感应器后面位置的吹瓶机上设置第三感应器,第三感应器的高度与瓶胚上的吊环高度一致,吹瓶机上设置报警器,报警器、第三感应器电连接控制系统。
7.优选地,随行轨道的运行方向的第一机械手指的后面吹瓶机的位置设置第二机械手指,第二机械手指连接伸缩机构,伸缩机构连接升降机构,升降结构设置在吹瓶机上;随行轨道内侧在吹瓶机上设置与第二机械手指对应的第二感应器,第二感应器设置在第一感应器和第三感应器之间,第二感应器的高度与瓶胚上的吊环高度一致,第二感应器、伸缩机构和升降机构电连接控制系统。
8.优选地,控制系统为plc控制系统。
9.优选地,伸缩机构为第一气缸,升降机构为第二气缸。
10.优选地,随行轨道、传动带利用电机驱动。
11.本实用新型在随行轨道的内外侧分别设置机械手指和感应器,一个伸缩装置和升降装置控制一个机械手指,更为方便控制机械手指的抓取,第一感应器感应到随行轨道上的瓶胚上没有吊环后,将信号传输给plc控制系统,plc控制系统控制第一机械手指连接的第一气缸和第二气缸,第一气缸伸缩杆伸长,第一机械手指夹取瓶胚,第二气缸的伸缩杆伸
长,第二气缸的伸缩杆带动带动第一气缸及瓶胚上升,第一气缸、第二气缸的伸缩杆缩短,机械手指将瓶胚置于输料机上,经过输料机输送至上胚料斗中,完成一次取无吊环瓶胚;当第一机械手指没有及时完成取无吊环瓶胚,第二感应器感应到无吊环瓶胚时,将信号传输给plc控制系统,plc控制系统控制第二机械手指连接的伸缩装置和升降装置,完成取无吊环瓶胚的动作;当第三感应器感应到无吊环瓶胚,将信号传输给plc控制系统,plc控制系统控制报警器,发出报警警报,通知技术人员检查自动上吊环工序,是否出现问题。
12.采用本实用新型的装置后,自动上吊环之后发现无吊环瓶胚,能够自动剔除并传回上胚料斗重新再利用,实现了无人操作,即能减少物料损耗,又降低了人工成本。
附图说明
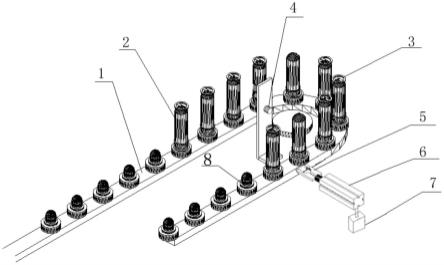
13.图1为本实用新型的结构示意图;
14.图2为本实用新型带有输料机的结构示意图
15.图中,1为随行轨道,2为瓶胚,3为吊环,4为第一感应器,5为第一机械手指,6为伸缩装置,7为升降装置,8为瓶托,9为输料机。
具体实施方式
16.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
17.如图所示,一种吹瓶机无吊环瓶胚自动剔除装置,包括吹瓶机和机械手指,吹瓶机上设置随行轨道1,随行轨道1上设置瓶托8,瓶托8上设置有瓶胚2,吹瓶机上的随行轨道1的外侧设置第一机械手指5,随行轨道1内侧在吹瓶机上设置与第一机械手指5对应的第一感应器4,第一感应器4高度与瓶胚2上的吊环3高度一致;第一机械手指5连接伸缩机构6,伸缩机构6连接升降机构7,升降机构7设置在吹瓶机上,第一感应器4、伸缩机构6和升降机构7电连接plc控制系统;第一机械手指5的下方设置有输料机9,输料机9的一端连接上胚料斗中。
18.另一种实施方式,随行轨道1的运行方向的第一感应器4后面位置的吹瓶机上设置第三感应器,吹瓶机上设置报警器,报警器、第三感应器电连接控制系统。
19.另一种实施方式,随行轨道1的运行方向的第一机械手指5的后面吹瓶机的位置设置第二机械手指,第二机械手指连接伸缩机构6,伸缩机构6连接升降机构7,升降机构7设置在吹瓶机上;随行轨道1内侧在吹瓶机上设置与第二机械手指对应的第二感应器,第二感应器设置在第一感应器4和第三感应器之间,第二感应器的高度与瓶胚2上的吊环3高度一致,第二感应器、伸缩机构6和升降机构7电连接控制系统。
20.上述,第一机械手指5与第二机械手指连接的伸缩机构6和升降机构7,不是同一个伸缩机构6和升降机构7,第一机械手指5对应连接一个伸缩机构和升降机构,第二机械手指对应连接另一个伸缩机构和升降机构。
21.本实用新型中也可以在第一机械手指5、机械手指抓取瓶胚2后,将瓶胚2放置收集箱中,再收集箱中的瓶胚2送入上胚料斗中。
22.优选地,伸缩机构6为第一气缸,升降机构7为第二气缸。
23.优选地,随行轨道1的传动带利用电机驱动。
24.上述机械手指为现有技术中已有的送胚手指、夹具,用来夹取瓶胚2。
25.本实用新型在随行轨道1的内外侧分别设置机械手指和感应器,第一感应器4感应到随行轨道1上的瓶胚2上没有吊环3后,将信号传输给plc控制系统,plc控制系统控制第一机械手指5连接的第一气缸和第二气缸,第一气缸伸缩杆伸长,第一机械手指5夹取瓶胚2,第二气缸的伸缩杆伸长,第二气缸伸缩杆带动带动第一气缸及瓶胚2上升,第一气缸、第二气缸的伸缩杆缩短,瓶胚2置于输料机9上方,机械手指将瓶胚2放置在输料机9上,经过输料机9输送至上胚料斗中,完成一次取无吊环3的瓶胚2;当第一机械手指5还没有及时取下无吊环3的瓶坯2时,第二感应器感应到无吊环3的瓶胚2后,将信号传输给plc控制系统,plc控制系统控制第二机械手指连接的伸缩装置和升降装置,完成取无吊环3瓶胚2的动作;当第三感应器感应到无吊环3瓶胚2,将信号传输给plc控制系统,plc控制系统控制报警器,发出报警警报,通知技术人员检查自动上吊环3工序,是否出现问题,及时调整维修。
26.采用本实用新型的装置后,自动上吊环3之后发现无吊环3的瓶胚2,能够自动剔除并传回上胚料斗重新再利用,实现了无人操作,即能减少物料损耗,又降低了人工成本。
技术特征:
1.一种吹瓶机无吊环瓶胚自动剔除装置,包括吹瓶机和机械手指,其特征在于,吹瓶机上的随行轨道(1)的外侧设置第一机械手指(5),随行轨道内侧在吹瓶机上设置与第一机械手指(5)对应的第一感应器(4),第一感应器(4)的高度与瓶胚(2)上的吊环(3)高度一致;第一机械手指(5)连接伸缩机构(6),伸缩机构(6)连接升降机构(7),升降机构(7)设置在吹瓶机上,第一感应器(4)、伸缩机构(6)和升降机构(7)电连接控制系统;第一机械手指(5)的下方设置有输料机(9),输料机(9)的一端连接上胚料斗。2.根据权利要求1所述的一种吹瓶机无吊环瓶胚自动剔除装置,其特征在于,随行轨道(1)的运行方向的第一感应器(4)的后面位置的吹瓶机上设置第三感应器,第三感应器的高度与瓶胚(2)上的吊环(3)高度一致,吹瓶机上设置报警器,报警器、第三感应器电连接控制系统。3.根据权利要求2所述的一种吹瓶机无吊环瓶胚自动剔除装置,其特征在于,所述随行轨道(1)的运行方向的第一机械手指(5)的后面吹瓶机的位置设置第二机械手指,第二机械手指连接伸缩机构(6),伸缩机构(6)连接升降机构(7),升降机构(7)设置在吹瓶机上;随行轨道(1)内侧在吹瓶机上设置与第二机械手指对应的第二感应器,第二感应器设置在第一感应器(4)和第三感应器之间,第二感应器的高度与瓶胚(2)上的吊环(3)高度一致,第二感应器、伸缩机构(6)和升降机构(7)电连接控制系统。4.根据权利要求1或2或3所述的一种吹瓶机无吊环瓶胚自动剔除装置,其特征在于,所述控制系统为plc控制系统。5.根据权利要求1所述的一种吹瓶机无吊环瓶胚自动剔除装置,其特征在于,所述伸缩机构(6)为第一气缸,升降机构(7)为第二气缸。
技术总结
本实用新型属于吹瓶机技术领域,具体涉及一种吹瓶机无吊环瓶胚自动剔除装置,包括吹瓶机和机械手指,吹瓶机上的随行轨道的外侧设置第一机械手指,随行轨道内侧在吹瓶机上设置有第一机械手指对应的第一感应器,第一感应器的高度与瓶胚上的吊环高度一致;第一机械手指的连接伸缩机构,伸缩机构连接升降机构,升降结构设置在吹瓶机上,第一感应器、伸缩机构和升降机构电连接控制系统;第一机械手指的下方设置有输料机,输料机的一端连接上胚料斗。该装置能够自动剔除并传回上胚料斗重新再利用,实现了无人操作,即能减少物料损耗,又降低了人工成本。工成本。工成本。
技术研发人员:莫敦习 张瑜 蒋友伟 赵祥文 赵庆森 厉夫奎
受保护的技术使用者:华仁药业(日照)有限公司
技术研发日:2022.07.14
技术公布日:2022/11/28
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1