基于纤维素的可变形变色的柔性驱动器的制备方法
本发明属于智能型材料领域,具体涉及一种基于纤维素的可变形变色的柔性驱动器的制备方法。
背景技术:
1、传统刚性机器人在与自然环境交互作用时,柔顺性方面存在一定的局限性,只能平行移动或者旋转运动,虽然具有运动精确的优点,但是对环境的适应能力有限,难以应用于复杂的非结构化环境,很大程度上限制了机器人的应用范围。近年来,随着机器人应用领域的不断扩大,医疗保健、仿生运动等特殊领域对机器人的柔顺性提出了更高的要求,如在进行微创手术时需要机器人不损害患者身体的情况下从患者体内取出异物;对于生物的模仿更加逼真灵活。除此之外,由于一些生物有能力改变自身的形状以适应不断变化的环境,赋予软体机器人与环境交互的能力并整合更多的反馈具有重要的意义。因此可变色软体机器人引起了国内外广泛的关注,基于化学颜色或者基于结构颜色的材料已经制备了各种颜色可调的软体驱动器,可以实现形状变形和颜色变色,并且有望在仿生机器人,隐形防伪和军事伪装中加以应用。因此,许多科学家开始致力于由柔性材料或可变形材料制作可变色软体机器人的研究工作。
2、目前,所制备出来的可变形可变色的柔性驱动器都有着驱动刺激单一,不可再生、制备工艺复杂、金属颜色材料昂贵等缺点。
技术实现思路
1、本发明的目的是克服上述背景技术的不足,提供一种基于纤维素的可变形变色的柔性驱动器的制备方法;该方法应能制备出双响应、可变形变色、成本低廉的柔性驱动器,且制备过程简单易行。
2、本发明提供的技术方案是:
3、基于纤维素的可变形变色的柔性驱动器的制备方法,包括以下步骤:
4、步骤1):制备可湿度响应变色的纤维素纳米晶-聚乙二醇二丙烯酸酯薄膜;
5、步骤1.1):将纤维素纳米晶溶液、聚乙二醇二丙烯酸酯溶液按20~25:0~0.2重量份比例进行混合,形成混合溶液;
6、步骤1.2):将前述混合溶液室温下密封搅拌,搅拌时间为3-4h;
7、步骤1.3):将搅拌后的混合溶液倒入模具中室温干燥48-72个小时;
8、步骤1.4):将干燥后得到的纤维素薄膜使用紫外线灯照射5分钟;
9、步骤1.5):放置于室温下冷却一段时间后,将薄膜取出并裁剪成矩形小条;
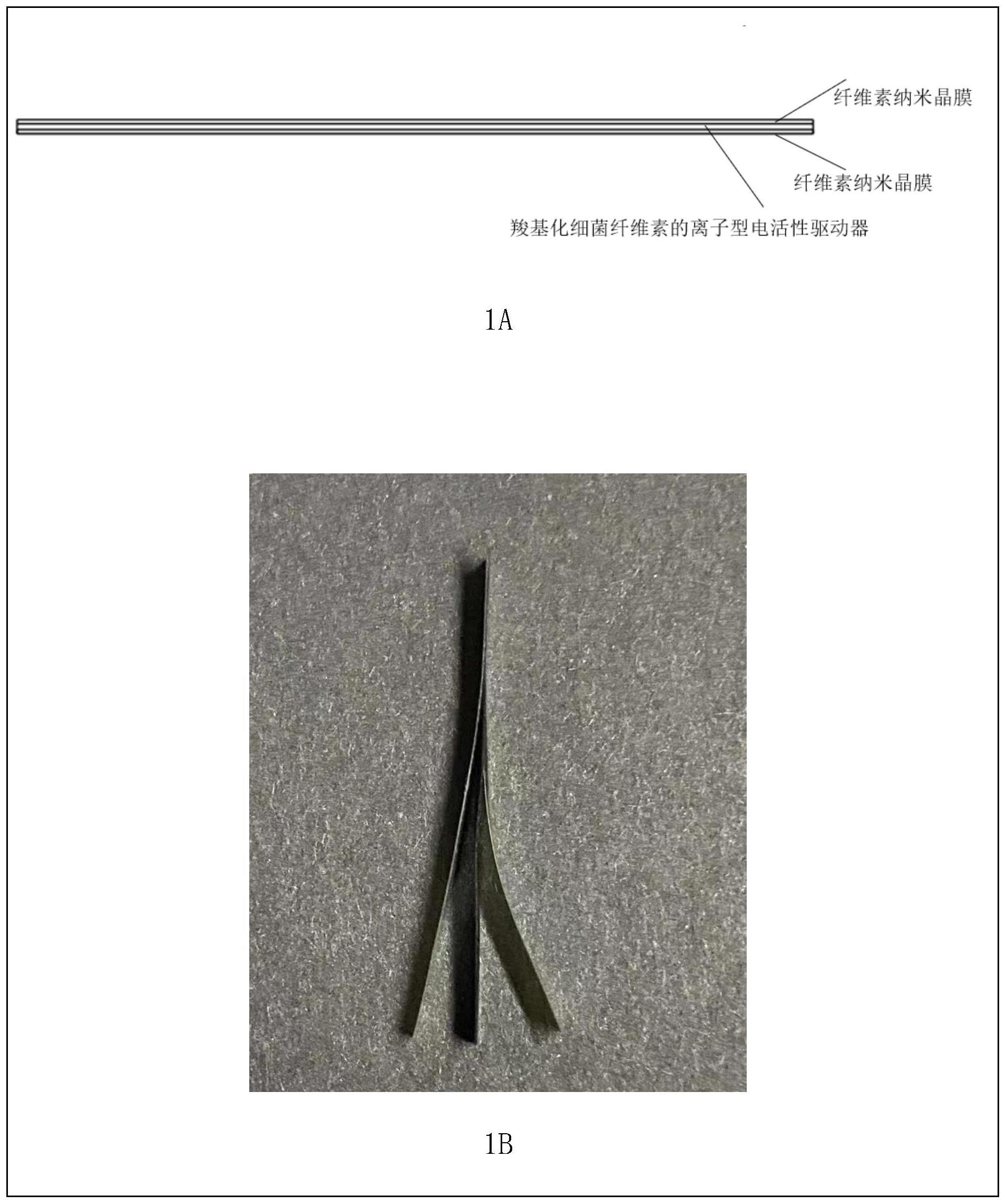
10、步骤2):制备基于羧基化细菌纤维素的离子型电活性驱动器(现有技术,一种性能良好的柔性驱动器,参见cn112480457a);
11、步骤3):制备基于纤维素的可变形变色的柔性驱动器;
12、步骤3.1):将矩形小条贴于基于羧基化细菌纤维素的离子型电活性驱动器的正反两面,使用滤纸将其包裹;
13、步骤3.2)将包裹住的膜放置于载玻片中间并使用夹具在室温下进行力压48-72个小时;
14、步骤3.3)将力压完成后的膜取出,裁剪成10×40mm的矩形小条。
15、将制备好的驱动器放置于存储仪器内,以供后期实验测试所用。
16、还需用输出位移平台对制备获得的驱动器进行位移测试以及湿度变色测试。
17、作为优选,所述纤维素纳米晶溶液的体积浓度为1%。
18、作为优选,所述聚乙二醇二丙烯酸酯溶液的体积浓度为5%。
19、作为优选,步骤1.1)中的混合温度为10~40℃。
20、本发明的有益效果是:
21、1、纤维素纳米晶和羧基化细菌纤维素,具有良好的生物降解性和低廉的成本,因此本发明采用纤维素纳米晶和羧基化细菌纤维素作为基质,成本低廉,容易获得,环保绿色;
22、2、本发明提供的使用纤维素和夹具力压的制备方法,使可变形变色柔性驱动器的制备工艺难度大大简化;
23、3、本发明向纤维素混合物中加入聚乙二醇二丙烯酸酯,其与纤维素产生物理交联,使得干燥获得的纤维素薄膜具有不同的结构色;
24、3、本发明制备出的可变形变色的柔性驱动器,在2v、100mhz的电压驱动下,就可以产生较大的形变和位移,并且响应速度较快,可以同时实现大变形和快速响应。同时,在湿度变化的刺激下,该驱动器的表面可以实现颜色的变化。
技术特征:
1.基于纤维素的可变形变色的柔性驱动器的制备方法,按照如下步骤进行:
2.根据权利要求1所述的基于纤维素的可变形变色的柔性驱动器的制备方法,其特征在于:步骤1.1)中所述纤维素纳米晶溶液的体积浓度为1%,聚乙二醇二丙烯酸酯溶液的体积浓度为5%。
3.根据权利要求2所述的基于纤维素的可变形变色的柔性驱动器的制备方法,其特征在于:步骤1.1)中,纤维素纳米晶溶液、聚乙二醇二丙烯酸酯溶液的重量份比例依序为20~25:0~0.2。
4.根据权利要求3所述的基于纤维素的可变形变色的柔性驱动器的制备方法,其特征在于:步骤1.2)中室温下密封搅拌的时间为3~4h。
5.根据权利要求4所述的基于纤维素的可变形变色的柔性驱动器的制备方法,其特征在于:步骤1.3)中的干燥是在室温无风且静置的环境下进行48-72小时。
6.根据权利要求5所述的基于纤维素的可变形变色的柔性驱动器的制备方法,其特征在于:步骤1.3)中的紫外线灯功率为100~400w,处理时间为2~10分钟。
7.根据权利要求6所述的基于纤维素的可变形变色的柔性驱动器的制备方法,步骤3)中所述的贴合,是将得到的基于羧基化细菌纤维素的离子型电活性驱动器以及纤维素纳米晶-聚乙二醇二丙烯酸酯复合膜,裁剪呈形状相适合的矩形条,接着对齐叠合。
8.根据权利要求7所述的基于纤维素的可变形变色的柔性驱动器的制备方法,其特征在于:步骤3)中所述的力压复合制备,是将对齐叠合后的待复合物用滤纸包裹后放置于载玻片中间,使用夹具夹紧放置48-72小时。
技术总结
本发明属于智能型材料领域,目的是提供一种基于纤维素的可变形变色的柔性驱动器的制备方法;该方法应能制备出双响应、可变形变色、成本低廉的柔性驱动器,且制备过程简单易行。技术方案是基于纤维素的可变形变色的柔性驱动器的制备方法,包括以下步骤:1):制备可湿度响应变色的纤维素纳米晶‑聚乙二醇二丙烯酸酯薄膜;步骤2):制备基于羧基化细菌纤维素的离子型电活性驱动器;步骤3):制备基于纤维素的可变形变色的柔性驱动器。
技术研发人员:王帆,周强坤
受保护的技术使用者:浙江理工大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!