一种用于自动质检操作的工业机器人及控制方法与流程
本发明涉及智能设备制造,具体涉及一种用于自动质检操作的工业机器人及控制方法。
背景技术:
1、注塑件是指由注塑机生产的各种注塑产品统称注塑件,包括各种包装,零件等。主要是由聚乙烯或聚丙烯等材料并添加了多种有机溶剂后制成的。注塑件是通过将塑料在注塑机加热料筒中塑化后,由柱塞或往复螺杆注射到闭合模具的模腔中形成制品的塑料加工方法。此法能加工外形复杂、尺寸精确或带嵌件的制品,生产效率高,生活中许多用品为注塑件,然而在注塑件生产过程中,通过对料筒温度、熔料温度、模具温度以及注射压力的精准控制,才能保证生产出来的注塑件不会产生变形,因此在注塑件生产完成后,需要对生产完后的注塑件进行外观检测,但是,由于注塑品的种类多样,其无法实现对注塑品的外观进行检测,本发明为了提高检测的效率提供一种用于自动质检操作的工业机器人及控制方法。针对现有技术存在以下问题:
2、1、现有的用于自动质检操作的工业机器人及控制方法,对产品进行输送时不具备缓冲保护结构,产品容易受到损坏;
3、2、现有的用于自动质检操作的工业机器人及控制方法,调节不够便捷,不便于对不同尺寸的产品进行检测,适用范围较小。
技术实现思路
1、为解决上述技术问题,本发明所采用的技术方案是:
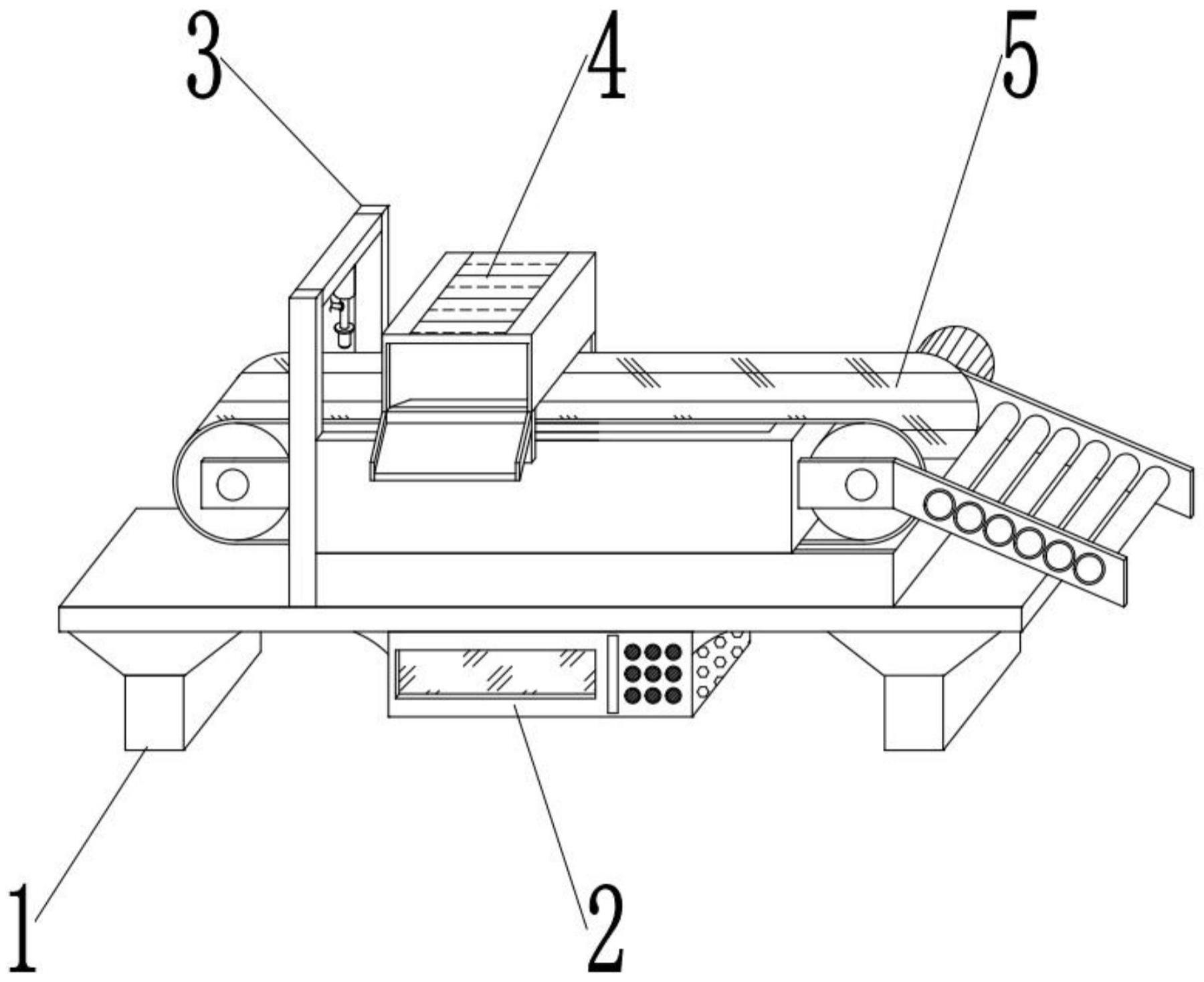
2、一种用于自动质检操作的工业机器人,包括主体,所述主体的顶部设置有控制机构,所述控制机构包括支撑板,所述支撑板固定安装在主体的顶部,所述支撑板的底部固定安装有控制器,所述控制器的两侧均固定连接有加固板,所述控制器的正面嵌入安装有显示屏,所述控制器的正面固定安装有控制键。
3、本发明技术方案的进一步改进在于:所述支撑板的顶部设置有检测机构,所述检测机构包括支撑架,所述支撑架固定安装在支撑板的顶部,所述支撑架的顶部固定安装有电动伸缩杆。
4、本发明技术方案的进一步改进在于:所述电动伸缩杆的一侧固定连接有连接线,所述电动伸缩杆的底端固定安装有安装板,所述安装板的底部固定安装有红外检测器。
5、本发明技术方案的进一步改进在于:所述支撑板的顶部设置有传送机构,所述传送机构包括支撑底箱,所述支撑底箱固定安装在支撑板的顶部,所述支撑底箱的两端均固定安装有连接架。
6、本发明技术方案的进一步改进在于:所述支撑底箱的两端同各国连接架转动连接有传送转筒,所述传送转筒的外部活动连接有传送带。
7、本发明技术方案的进一步改进在于:其中一个所述连接架的一侧固定安装有传送电机,所述传送电机的一端固定安装有固定架,所述固定架的内部转动连接有转动杆。
8、本发明技术方案的进一步改进在于:所述支撑底箱的顶部设置有处理机构,所述处理机构包括推送箱,所述推送箱固定安装在支撑底箱的顶部,所述推送箱的底部螺纹连接有固定螺栓。
9、本发明技术方案的进一步改进在于:所述推送箱的内部固定安装有连接板,所述推送箱的一侧固定安装有倾斜板,所述推送箱的另一侧固定安装有液压杆,所述液压杆的一端固定安装有推送板,所述液压杆的另一端固定安装有液压油管。
10、一种用于自动质检操作的工业机器人控制方法,包括以下步骤,
11、s1、质量检测:通过计算机电脑将发送运动命令给机器人,机器人接收命令并对命令进行编码,工业机器人接收编码后的运动命令,并将编码后的运动命令解码,解码后发送给检测模块,将产品放置在工业机器人的顶部;
12、s2、合格产品输送:检测模块通过红外检测对物品进行红外扫描,扫描数据传送至控制模块,控制模块对扫描的数据进行分析,数据在设定的范围之间为合格产品,传送模块继续将合格产品进行输送;
13、s3、不合格产品处理:检测数据超过合格的范围时,控制模块控制机器人的处理模块,处理模块将残次品推处传送模块,通过工作人员将残次品进行收集统一处理。
14、由于采用了上述技术方案,本发明相对现有技术来说,取得的技术进步是:
15、1、本发明提供一种用于自动质检操作的工业机器人及控制方法,通过传送电机、固定架和转动杆的共同作用下,传送电机固定安装在其中一个连接架的一侧,使用时传送电机的输出端与其中一个传送转筒的一端固定连接,传送电机能够带动传送转筒进行转动,传送转筒转动能够带动传送带进行移动,进而带动产品进行输送,提高了机器人检测时的效率,固定架固定连接在连接架的一端,转动杆转动连接在固定架的内部,转动杆能够跟随产品进行转动,固定架固定为一定的倾斜角度,能够在产品输送时起到缓冲作用,防止产品损坏。
16、2、本发明提供一种用于自动质检操作的工业机器人及控制方法,通过电动伸缩杆和红外检测器的共同作用下,电动伸缩杆固定安装在支撑架的底部,红外检测器固定安装在安装板的底部,使用时电动伸缩杆能够进行伸缩调节,便于将安装板推动,进而能够带动红外检测器进行高度调节,便于对不同尺寸的产品进行检测,提高适用范围。
17、3、本发明提供一种用于自动质检操作的工业机器人及控制方法,通过液压杆和推送板的共同作用下,液压杆固定安装在推送箱的一侧,推送板固定安装在液压杆的一端,使用时液压杆能够带动推送板进行伸缩调节,推送板移动能够将不合格的产品进行推送,不合格的产品推出推送箱便于工作人员进行统一处理,提高了处理的效率。
18、4、本发明提供一种用于自动质检操作的工业机器人及控制方法,通过不合格产品处理的作用下,检测数据超过合格的范围时,控制模块控制机器人的处理模块,处理模块将残次品推处传送模块,通过工作人员将残次品进行收集统一处理,实现了将检测不合格的注塑品从皮带中抓取出来放入放置台中进行收集,进而实现了在检测过程中的对合格与不合格注塑品的筛除分类,进而便可将不合格的注塑品进行回收处理,进而保证了不合格产品不会与合格的注塑品产生混乱。
技术特征:
1.一种用于自动质检操作的工业机器人,包括主体(1),其特征在于:所述主体(1)的顶部设置有控制机构(2),所述控制机构(2)包括支撑板(21),所述支撑板(21)固定安装在主体(1)的顶部,所述支撑板(21)的底部固定安装有控制器(22),所述控制器(22)的两侧均固定连接有加固板(23),所述控制器(22)的正面嵌入安装有显示屏(24),所述控制器(22)的正面固定安装有控制键(25)。
2.根据权利要求1所述的一种用于自动质检操作的工业机器人,其特征在于:所述支撑板(21)的顶部设置有检测机构(3),所述检测机构(3)包括支撑架(31),所述支撑架(31)固定安装在支撑板(21)的顶部,所述支撑架(31)的顶部固定安装有电动伸缩杆(32)。
3.根据权利要求2所述的一种用于自动质检操作的工业机器人,其特征在于:所述电动伸缩杆(32)的一侧固定连接有连接线(33),所述电动伸缩杆(32)的底端固定安装有安装板(34),所述安装板(34)的底部固定安装有红外检测器(35)。
4.根据权利要求1所述的一种用于自动质检操作的工业机器人,其特征在于:所述支撑板(21)的顶部设置有传送机构(5),所述传送机构(5)包括支撑底箱(51),所述支撑底箱(51)固定安装在支撑板(21)的顶部,所述支撑底箱(51)的两端均固定安装有连接架(52)。
5.根据权利要求4所述的一种用于自动质检操作的工业机器人,其特征在于:所述支撑底箱(51)的两端同各国连接架(52)转动连接有传送转筒(53),所述传送转筒(53)的外部活动连接有传送带(54)。
6.根据权利要求4所述的一种用于自动质检操作的工业机器人,其特征在于:其中一个所述连接架(52)的一侧固定安装有传送电机(55),所述传送电机(55)的一端固定安装有固定架(56),所述固定架(56)的内部转动连接有转动杆(57)。
7.根据权利要求4所述的一种用于自动质检操作的工业机器人,其特征在于:所述支撑底箱(51)的顶部设置有处理机构(4),所述处理机构(4)包括推送箱(41),所述推送箱(41)固定安装在支撑底箱(51)的顶部,所述推送箱(41)的底部螺纹连接有固定螺栓(43)。
8.根据权利要求7所述的一种用于自动质检操作的工业机器人,其特征在于:所述推送箱(41)的内部固定安装有连接板(44),所述推送箱(41)的一侧固定安装有倾斜板(42),所述推送箱(41)的另一侧固定安装有液压杆(45),所述液压杆(45)的一端固定安装有推送板(47),所述液压杆(45)的另一端固定安装有液压油管(46)。
9.一种用于自动质检操作的工业机器人控制方法,包括以下步骤,其特征在于:
技术总结
本发明公开了一种用于自动质检操作的工业机器人及控制方法,涉及智能设备制造技术领域,包括主体,所述主体的顶部设置有控制机构,所述控制机构包括支撑板,所述支撑板固定安装在主体的顶部,所述支撑板的底部固定安装有控制器,所述控制器的两侧均固定连接有加固板,所述控制器的正面嵌入安装有显示屏,所述控制器的正面固定安装有控制键。本发明传送电机能够带动传送转筒进行转动,传送转筒转动能够带动传送带进行移动,进而带动产品进行输送,提高了机器人检测时的效率,固定架固定连接在连接架的一端,转动杆转动连接在固定架的内部,转动杆能够跟随产品进行转动,固定架为一定的倾斜角度,能够起到缓冲作用,防止产品损坏。
技术研发人员:郑碎武,乔红,凌晨,方嘉豪,黄剑锋,宋鹏
受保护的技术使用者:惠州中科先进制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!