一种高重复精度的注塑机及其控制系统的制作方法
本发明属于注塑机,具体涉及一种高重复精度的注塑机及其控制系统。
背景技术:
1、注塑机的工艺过程一般分为合模、锁模、射胶、保压、熔胶、冷却、松模、开模、取出等几个阶段,各个阶段需要不同的压力和流量,通过多次重复注塑成型产品的重量重复精度来描述注塑质量,因此如何实现注塑成型的高重复精度控制就是注塑成型控制的一个关键问题。
2、电动注塑机一般采用异步电机或者永磁电机来完成注塑过程,而使用永磁电机作为驱动部件时,当永磁电机端电压随转速升高到逆变器能够输出的最大电压值之后,电机电枢绕组电流不能再增大,此时需减弱永磁电机的永磁磁场使电机转速继续升高,以满足恒功率控制和宽调速范围运行。然而弱磁控制时如果d轴弱磁电流过小会使电机无法到达给定的高转速,而d轴弱磁电流过大又会导致定子电流增大,导致电机能输出的最大转矩减小,铜耗增加,影响电机性能。同时,永磁电机所需的弱磁电流会随着电机运行时负载转矩的变化而变化。
3、超前角弱磁控制算法是当今一种较为成熟的弱磁控制算法,在稳态运行等大多数工况下都有着良好的弱磁控制效果。然而超前角弱磁控制方法依赖于pi进行弱磁超前角选择,在负载转矩频繁波动的情况下弱磁效果不够理想。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种高重复精度的注塑机及其控制系统,解决了现有注塑机采用超前角弱磁控制算法来提高注塑机动力系统的控制精度时由于负载转矩频繁波动的情况下弱磁效果不够理想的问题。
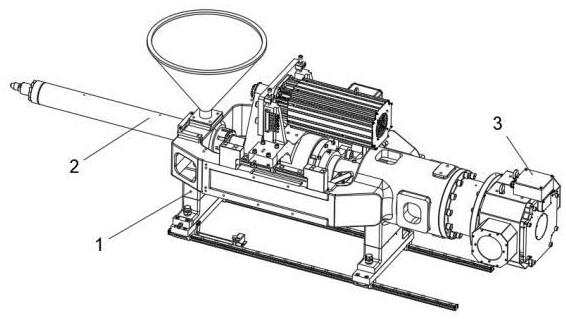
2、本发明的目的可以通过以下技术方案实现:一种高重复精度的注塑机,包括底座、射胶机构、驱动电机、控制终端、丝杠和检测机构,所述控制终端分别与射胶机构、驱动电机和检测机构通信连接,所述射胶机构和驱动电机均安装于底座的顶面,所述丝杠为射胶机构的射胶部,所述丝杠与驱动电机的输出端一体构成,所述检测机构检测丝杠的射胶位置和速度以及射胶压力并将检测结果传输至控制终端,所述控制终端根据检测结果调整驱动电机的驱动力和射胶机构的射胶压力。
3、作为本发明的一种优选技术方案,所述驱动电机还包括一端中空圆柱形的基座、定子绕组、转子、轴承端盖和编码器,所述轴承端盖安装于基座的中空端,所述编码器安装于基座内后端并与丝杆连接,所述转子转动设置于基座内,所述丝杠的一端位于转子内并与转子连接,所述定子绕组包裹于转子外并安装于外壳内。
4、作为本发明的一种优选技术方案,所述驱动电机还包括过渡轴尾,所述丝杆通过过渡轴尾与编码器连接。
5、作为本发明的一种优选技术方案,所述检测机构包括位移传感器、压力传感器和速度传感器,所述位移传感器安装于丝杆上,所述压力传感器和速度传感器均安装于射胶机构内,所述位移传感器检测丝杠的射胶位置,所述速度传感器检测丝杠的射胶速度,所述压力传感器检测射胶机构内的射胶压力变化。
6、作为本发明的一种优选技术方案,所述驱动电机为永磁同步伺服电动机。
7、作为本发明的一种优选技术方案,所述控制终端采用弱磁控制算法控制驱动电机输出的电压和电流并根据检测结果进行进一步调整。
8、基于上述的一种高重复精度的注塑机,本发明还提出一种高重复精度的注塑机的控制系统,包括包括弱磁控制模块、控制电路、运动曲线规划模块和逆变器,所述运动曲线规划模块根据检测机构的检测结果对丝杆的运动轨迹进行自动规划,所述弱磁控制模块根据运动曲线规划模块为控制终端的超前角弱磁控制算法提供负载转矩变量计算超前角,所述控制电路根据设定转速、驱动电机的驱动电流、转速和超前角提供控制信号,所述逆变器用于向驱动电机输出三相电压,并根据控制信号控制三相电压的幅值和相位,以调节驱动电机的转速。
9、作为本发明的一种优选技术方案,所述控制电路包括:微分单元,所述用于对驱动电机的电角度进行微分,获得驱动电机的实时转速;
10、转速控制单元,用于根据所述设定转速和所述实时转速的差,提供设定电流矢量;
11、转换单元,用于根据所述设定电流矢量和所述超前角提供设定电流;
12、第一坐标变换单元,用于根据驱动电机的三相驱动电流经过坐标变换获得实时电流;
13、电流控制单元,用于根据所述设定电流和所述实时电流的差,提供第一设定电压;
14、第二坐标变换单元,用于根据所述第一设定电压进行坐标变换获得第二设定电压;
15、空间矢量脉宽调制单元,用于根据所述第二设定电压提供所述控制信号。
16、作为本发明的一种优选技术方案,所述弱磁控制模块包括:电压转换单元,用于根据所述第一设定电压获得电压矢量;
17、超前角限幅单元,用于根据约束条件以及所述电压矢量与设定的最大电压的差,获得超前角的动态限幅值函数。
18、作为本发明的一种优选技术方案,所述运动曲线规划模块根据检测机构的检测结果获得丝杠的运动曲线。
19、本发明的有益效果为:
20、1. 通过将驱动电机的输出端与射胶机构中射胶部的丝杆一体构成,并通过检测机构检测丝杆的射胶位置和速度以及射胶压力并通过控制终端来调整驱动电机的驱动力和射胶机构的射胶压力,让驱动电机的输出值与负载的检测值一致,提高对驱动电机的输出值的调整精度,减少误差;
21、2. 通过运动曲线规划模块对丝杆的运动曲线进行规划,让丝杆在进行射胶时的负载转矩可以通过运动曲线得到体现,弱磁控制模块根据运动曲线规划模块得到的负载转矩来对弱磁控制算法进行调整,提高弱磁控制算法的精度,减少受到负载转矩频繁波动的影响;
技术特征:
1.一种高重复精度的注塑机,其特征在于:包括底座、射胶机构、驱动电机、控制终端、丝杆和检测机构,所述控制终端分别与射胶机构、驱动电机和检测机构通信连接,所述射胶机构和驱动电机均安装于底座的顶面,所述丝杆为射胶机构的射胶部,所述丝杆与驱动电机的输出端一体构成,所述检测机构检测丝杆的射胶位置和速度以及射胶压力并将检测结果传输至控制终端,所述控制终端根据检测结果调整驱动电机的驱动力和射胶机构的射胶压力。
2.根据权利要求1所述的一种高重复精度的注塑机,其特征在于:所述驱动电机还包括一端中空圆柱形的基座、定子绕组、转子、轴承端盖和编码器,所述轴承端盖安装于基座的中空端,所述编码器安装于基座内后端并与丝杆连接,所述转子转动设置于基座内,所述丝杆的一端位于转子内并与转子连接,所述定子绕组包裹于转子外并安装于外壳内。
3.根据权利要求2所述的一种高重复精度的注塑机,其特征在于:所述驱动电机还包括过渡轴尾,所述丝杆通过过渡轴尾与编码器连接。
4.根据权利要求1所述的一种高重复精度的注塑机,其特征在于:所述检测机构包括位移传感器、压力传感器和速度传感器,所述位移传感器安装于丝杆上,所述压力传感器和速度传感器均安装于射胶机构内,所述位移传感器检测丝杆的射胶位置,所述速度传感器检测丝杆的射胶速度,所述压力传感器检测射胶机构内的射胶压力变化。
5.根据权利要求1所述的一种高重复精度的注塑机,其特征在于:所述驱动电机为永磁同步伺服电机。
6.根据权利要求5所述的一种高重复精度的注塑机,其特征在于:所述控制终端采用超前角弱磁控制算法控制驱动电机输出的电压和电流并根据检测结果进行进一步调整。
7.一种高重复精度的注塑机的控制系统,用于上述权利要求1-6任意一项所述的一种高重复精度的注塑机,其特征在于:包括弱磁控制模块、控制电路、运动曲线规划模块和逆变器,所述运动曲线规划模块根据检测机构的检测结果对丝杆的运动轨迹进行自动规划,所述弱磁控制模块根据运动曲线规划模块为控制终端的超前角弱磁控制算法提供负载转矩变量计算超前角,所述控制电路根据设定转速、驱动电机的驱动电流、转速和超前角提供控制信号,所述逆变器用于向驱动电机输出三相电压,并根据控制信号控制三相电压的幅值和相位,以调节驱动电机的转速。
8.根据权利要求7所述的一种高重复精度的注塑机的控制系统,其特征在于:所述控制电路包括:
9.根据权利要求8所述的一种高重复精度的注塑机的控制系统,其特征在于:所述弱磁控制模块包括:
10.根据权利要求7所述的一种高重复精度的注塑机的控制系统,其特征在于:所述运动曲线规划模块根据检测机构的检测结果获得丝杆的运动曲线。
技术总结
本发明涉及一种高重复精度的注塑机及其控制系统,属于注塑机技术领域。包括底座、射胶机构、驱动电机、控制终端、丝杠和检测机构,所述控制终端分别与射胶机构、驱动电机和检测机构通信连接,所述射胶机构和驱动电机均安装于底座的顶面,所述丝杠为射胶机构的射胶部,所述丝杠与驱动电机的输出端一体构成,所述检测机构检测丝杠的射胶位置和速度以及射胶压力并将检测结果传输至控制终端,所述控制终端根据检测结果调整驱动电机的驱动力和射胶机构的射胶压力,本发明将驱动电机的输出端与射胶机构中射胶部的丝杆一体构成,让驱动电机的输出值与负载的检测值一致,提高对驱动电机的输出值的调整精度,减少误差。
技术研发人员:朱燕志,黄志锋,朱康建,孙晓波,曾庆飞,郭晓丽,李浩娜,袁中华,杜呈表,刘媛
受保护的技术使用者:博创智能装备股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!