一种注塑装置用机械手的制作方法
本技术涉及注塑机,尤其涉及一种注塑装置用机械手。
背景技术:
1、目前,在注塑机模内产品取出的生产过程中,有些采用人工取出的方式,有些采用机械手取出的方式,近年来,用人成本越来越高,同时人工取出成型产品的工作效率较低、取出速度较慢,且对于一些表面精度较高、尺寸较小的注塑产品,传统的人工操作更是不便,因此市场上已经有越来越多的机械手装置来代替人工,工人原本是一人一机,采用机械手装置后能够实现一人三机,甚至更多,降低了用人成本,提高了生产效率。
2、现有技术存在以下不足:现有的机械手臂在使用机械手臂时,夹持物品的大小难以控制,从而不能对不同大小的物品进行夹持,给使用者带来麻烦。
技术实现思路
1、本实用新型的目的是为了解决现有技术中存在的缺点,而提出的一种注塑装置用机械手。
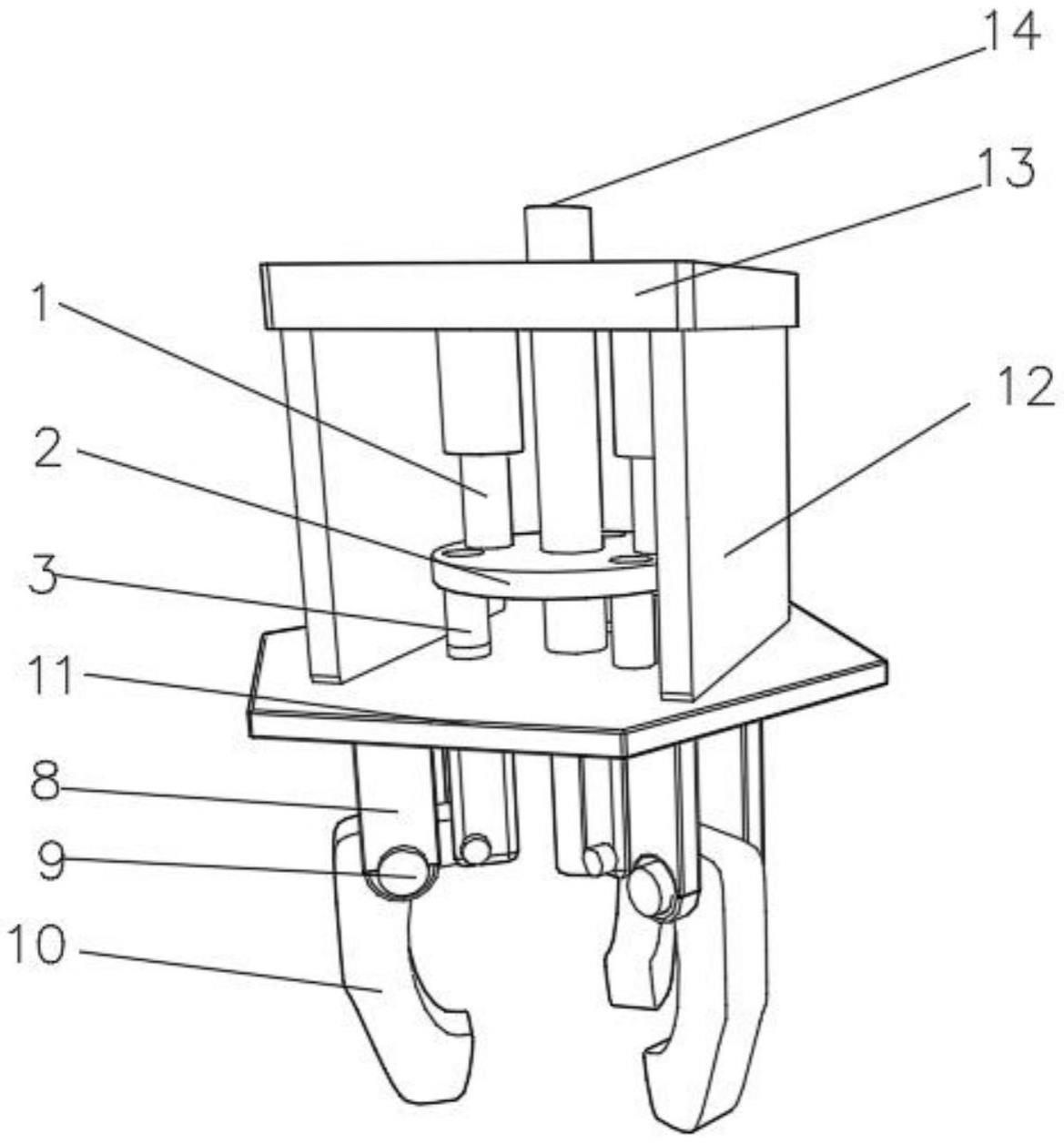
2、为了实现上述目的,本实用新型采用了如下技术方案:一种注塑装置用机械手,包括底板,所述底板顶部滑动连接有多个连接柱三,所述连接柱三底部均固定连接有连接座,所述连接座内部均设置有插孔,所述插孔内部均转动连接有连接柱一,所述连接座内部均转动连接有联动杆的一端,所述联动杆另一端转动连接有连接柱二,所述联动杆内部均转动连接有抓爪的一端。
3、作为上述技术方案的进一步描述:
4、所述底板底部固定连接有多个连接架,所述连接架内部均固定连接有转柱。
5、作为上述技术方案的进一步描述:
6、所述抓爪均通过转柱转动连接在连接架内部,所述连接座均通过连接柱一与联动杆相连接。
7、作为上述技术方案的进一步描述:
8、所述联动杆均通过连接柱二与抓爪相连接,多个所述连接柱三顶壁固定连接有连接盘。
9、作为上述技术方案的进一步描述:
10、所述底板顶壁固定连接有侧架,所述侧架顶壁固定连接有顶板。
11、作为上述技术方案的进一步描述:
12、所述顶板底壁固定连接有多个液压组件,所述液压组件输出端固定连接在连接盘顶壁。
13、作为上述技术方案的进一步描述:
14、所述顶板中部设置有滑柱,所述滑柱贯穿底板并延伸至底板底部。
15、作为上述技术方案的进一步描述:
16、所述连接盘滑动连接在滑柱外侧壁。
17、本实用新型具有如下有益效果:
18、本实用新型中,首先通过连接架、转柱、抓爪、连接柱二、插孔、连接柱一之间的配合达到了夹持的效果,解决了的夹持物品的大小难以控制,从而不能对不同大小的物品进行夹持问题,提高了注塑工作效率。
技术特征:
1.一种注塑装置用机械手,包括底板(11),其特征在于:所述底板(11)顶部滑动连接有多个连接柱三(3),所述连接柱三(3)底部均固定连接有连接座(5),所述连接座(5)内部均设置有插孔(6),所述插孔(6)内部均转动连接有连接柱一(7),所述连接座(5)内部均转动连接有联动杆(14)的一端,所述联动杆(14)另一端转动连接有连接柱二(15),所述联动杆(14)内部均转动连接有抓爪(10)的一端。
2.根据权利要求1所述的一种注塑装置用机械手,其特征在于:所述底板(11)底部固定连接有多个连接架(8),所述连接架(8)内部均固定连接有转柱(9)。
3.根据权利要求1所述的一种注塑装置用机械手,其特征在于:所述抓爪(10)均通过转柱(9)转动连接在连接架(8)内部,所述连接座(5)均通过连接柱一(7)与联动杆(14)相连接。
4.根据权利要求1所述的一种注塑装置用机械手,其特征在于:所述联动杆(14)均通过连接柱二(15)与抓爪(10)相连接,多个所述连接柱三(3)顶壁固定连接有连接盘(2)。
5.根据权利要求1所述的一种注塑装置用机械手,其特征在于:所述底板(11)顶壁固定连接有侧架(12),所述侧架(12)顶壁固定连接有顶板(13)。
6.根据权利要求5所述的一种注塑装置用机械手,其特征在于:所述顶板(13)底壁固定连接有多个液压组件(1),所述液压组件(1)输出端固定连接在连接盘(2)顶壁。
7.根据权利要求5所述的一种注塑装置用机械手,其特征在于:所述顶板(13)中部设置有滑柱(4),所述滑柱(4)贯穿底板(11)并延伸至底板(11)底部。
8.根据权利要求4所述的一种注塑装置用机械手,其特征在于:所述连接盘(2)滑动连接在滑柱(4)外侧壁。
技术总结
本技术涉及注塑机技术领域,公开了一种注塑装置用机械手,包括底板,所述底板顶部滑动连接有多个连接柱三,所述连接柱三底部均固定连接有连接座,所述连接座内部均设置有插孔,所述插孔内部均转动连接有连接柱一,所述连接座内部均转动连接有联动杆的一端,所述联动杆另一端转动连接有连接柱二,所述联动杆内部均转动连接有抓爪的一端,所述底板底部固定连接有多个连接架,所述连接架内部均固定连接有转柱。本技术中,通过连接架、转柱、抓爪、连接柱二、插孔、连接柱一之间的配合达到了夹持的效果,解决了的夹持物品的大小难以控制,从而不能对不同大小的物品进行夹持问题,提高了注塑工作效率。
技术研发人员:骆剑候
受保护的技术使用者:浙江安吉荣艺家具有限公司
技术研发日:20230107
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!