半成品注塑件抓取机器人的制作方法
本技术涉及上料机构的,尤其涉及半成品注塑件抓取机器人。
背景技术:
1、半成品注塑件(瓶盖、瓶身等)为了增加多样性,通常在生产注塑件时都会通过印刷机对注塑件印制一些图案。
2、传统上都是通过人工将半成品注塑件放置到印刷机中进行印刷工作,人工上料还存在诸多弊端:1.在人工上料时指纹、汗渍易印在注塑件上,生产出来的注塑件产品有瑕疵;2.人工上料劳动强度大,工作效率低,生产速度慢。
技术实现思路
1、本实用新型旨在解决现有技术中存在的至少一个问题。为此,本实用新型的目的在于提出半成品注塑件抓取机器人,通过设置的三组机械手来完成半成品注塑件的上料、托盘的按压以及移除,减少了次品注塑件生成的,减轻了人工的劳动量并且增加了工作效率。
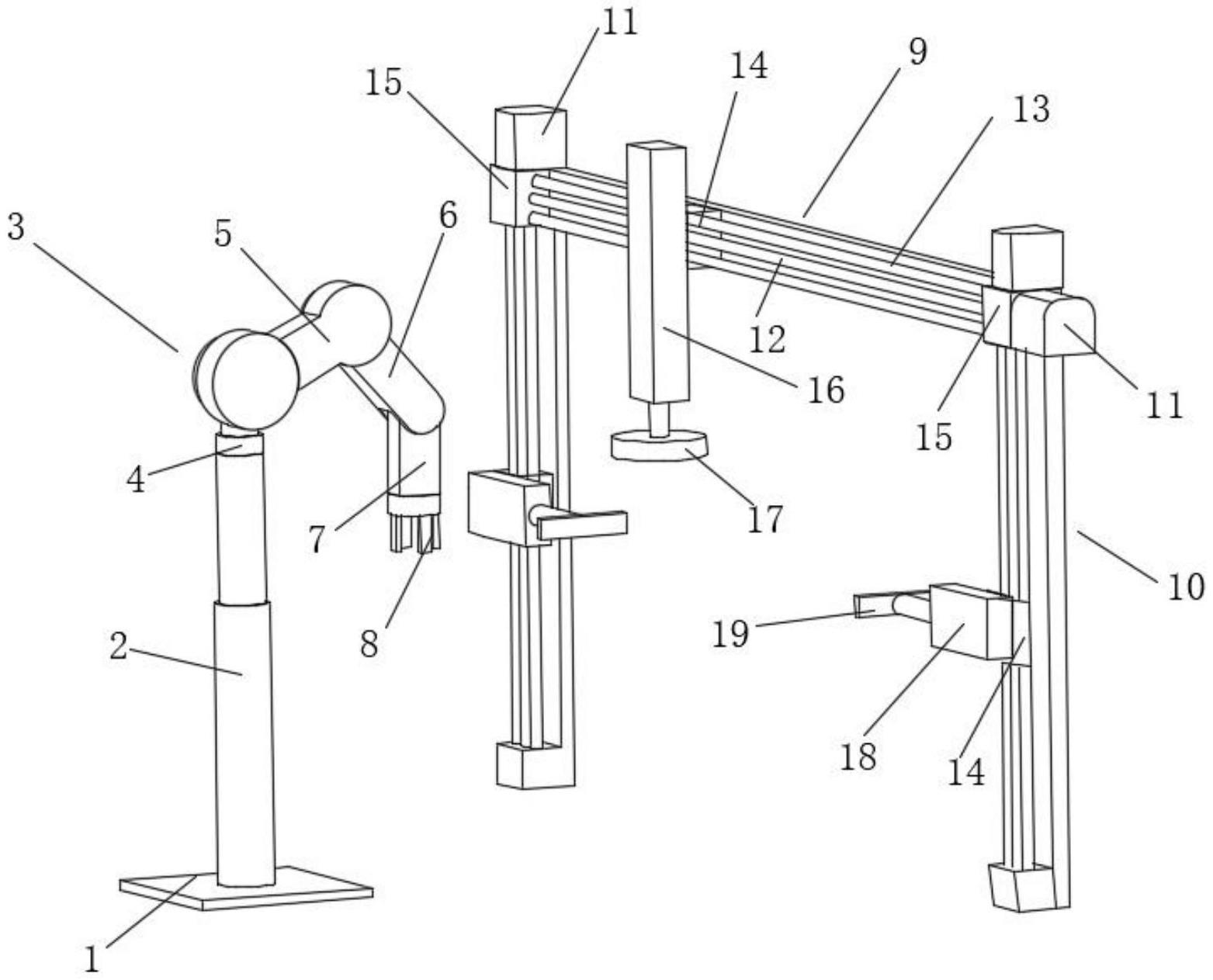
2、为实现上述目的,本实用新型提出了半成品注塑件抓取机器人,包括:底座,所述底座上方设置有升降装置,所述升降装置的输出轴上设置有上料机器人;还包括:第一滑台模组和第二滑台模组,所述第一滑台模组上设置有托盘吸取装置,所述第二滑台模组上设置有托盘夹持装置。
3、作为本实用新型的进一步优化方案,所述上料机器人包括转盘底座、第一转动关节、第二转动关节、第三转动关节和手爪,所述转盘底座活动安装在升降装置的输出轴上,所述第一转动关节活动安装在转盘底座上,所述第二转动关节活动安装在第一转动关节上,所述第三转动关节活动安装在第二转动关节上,所述手爪活动安装在第三转动关节。
4、作为本实用新型的进一步优化方案,所述第一滑台模组和第二滑台模组都包括电机、滚珠丝杆、滑杆、滑台和两块轴承片,所述滚珠丝杆一端安装在电机的输出轴上,另一端安装在轴承片,所述滑杆一端安装在轴承片,另一端安装在另一个轴承片上,所述滑台安装在滚珠丝杆和滑杆上。
5、作为本实用新型的进一步优化方案,所述第二滑台模组的数量为两个,分别安装在第一滑台模组的两端。
6、作为本实用新型的进一步优化方案,所述托盘吸取装置包括第一输出装置和电磁吸盘,所述电磁吸盘安装在第一输出装置的输出轴上,所述第一输出装置安装在第一滑台模组的滑台上。
7、作为本实用新型的进一步优化方案,所述托盘夹持装置包括第二输出装置和夹块,所述夹块安装在第二输出装置的输出轴上,所述第二输出装置安装在第二滑台模组的滑台上。
8、作为本实用新型的进一步优化方案,所述升降装置、第一输出装置和第二输出装置可以为液压缸、气压缸和电动推杆。
9、本实用新型的有益效果:
10、本实用新型通过设置的三组机械手来完成半成品注塑件的上料、托盘的按压以及移除,减少了次品注塑件生成的,减轻了人工的劳动量并且增加了工作效率。
11、本实用新型的特征及优点将通过实施列结合附图进行详细说明。
技术特征:
1.半成品注塑件抓取机器人,包括:底座,其特征在于,所述底座上方设置有升降装置,所述升降装置的输出轴上设置有上料机器人;还包括:第一滑台模组和第二滑台模组,所述第一滑台模组上设置有托盘吸取装置,所述第二滑台模组上设置有托盘夹持装置。
2.根据权利要求1所述的半成品注塑件抓取机器人,其特征在于,所述上料机器人包括转盘底座、第一转动关节、第二转动关节、第三转动关节和手爪,所述转盘底座活动安装在升降装置的输出轴上,所述第一转动关节活动安装在转盘底座上,所述第二转动关节活动安装在第一转动关节上,所述第三转动关节活动安装在第二转动关节上,所述手爪活动安装在第三转动关节。
3.根据权利要求2所述的半成品注塑件抓取机器人,其特征在于,所述第一滑台模组和第二滑台模组都包括电机、滚珠丝杆、滑杆、滑台和两块轴承片,所述滚珠丝杆一端安装在电机的输出轴上,另一端安装在轴承片,所述滑杆一端安装在轴承片,另一端安装在另一个轴承片上,所述滑台安装在滚珠丝杆和滑杆上。
4.根据权利要求3所述的半成品注塑件抓取机器人,其特征在于,所述托盘吸取装置包括第一输出装置和电磁吸盘,所述电磁吸盘安装在第一输出装置的输出轴上,所述第一输出装置安装在第一滑台模组的滑台上。
5.根据权利要求4所述的半成品注塑件抓取机器人,其特征在于,所述托盘夹持装置包括第二输出装置和夹块,所述夹块安装在第二输出装置的输出轴上,所述第二输出装置安装在第二滑台模组的滑台上。
6.根据权利要求5所述的半成品注塑件抓取机器人,其特征在于,所述第二滑台模组的数量为两个,分别安装在第一滑台模组的两端。
7.根据权利要求6所述的半成品注塑件抓取机器人,其特征在于,所述升降装置、第一输出装置和第二输出装置为液压缸、气压缸和电动推杆中的一种。
技术总结
本技术公开了半成品注塑件抓取机器人,包括:底座,所述底座上方设置有升降装置,所述升降装置的输出轴上设置有上料机器人;还包括:第一滑台模组和第二滑台模组,所述第一滑台模组上设置有托盘吸取装置,所述第二滑台模组上设置有托盘夹持装置。本技术通过设置的三组机械手来完成半成品注塑件的上料、托盘的按压以及移除,减少了次品注塑件生成的,减轻了人工的劳动量并且增加了工作效率。
技术研发人员:沈芳
受保护的技术使用者:绍兴市神龙铝塑制品有限公司
技术研发日:20230307
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!