金属容器的塑料提手全自动制作设备的制作方法
本技术涉及金属容器的提手制作设备,尤其涉及金属容器的塑料提手全自动制作设备。
背景技术:
1、为了改进传统圆形条材金属提手成本高及手提舒适度差的问题,申请人先后提出了申请号为201410180247.6发明名称为金属包装罐上全自动高速制作塑料提手的制作方法及其设备的专利申请,以及申请号为202120395801.8发明名称为一种金属包装罐的塑料提手全自动制作安装机的专利申请。此类设备包括:机架,所述机架包括第一端以及与第一端相对的第二端;从机架第一端到第二端依次设置有焊钉孔成型机构、焊钉安装机构、塑料带牵引机构、提手裁切机构、提手折弯及焊接机构,工作时,一整条扁平截面的塑料带,在塑料带牵引机构的牵引作用下,依次通过焊钉孔成型机构、焊钉安装机构、塑料带牵引机构、提手裁切机构进行输送,塑料带被焊钉孔成型机构冲切出两个并列的焊钉孔,该两个并列的焊钉孔到达与焊钉安装机构对应的位置后,焊钉安装机构将两个焊钉安装至该两个并列的焊钉孔上,该两个并列的焊钉孔到达与提手裁切机构对应的位置后,提手裁切机构从该两个并列的焊钉孔中间切断,如此重复,使得从塑料带裁切出一根根的塑料提手,裁切下来的塑料提手被输送到与提手折弯及焊接机构对应的位置,被自动折弯后通过塑料提手上的焊钉焊接于金属容器。上述现有技术存在以下缺陷:受塑料带材质特性、以及塑料带牵引机构的运动精度等因素影响,塑料带的该两个并列的焊钉孔被输送至提手裁切工位后,该两个并列的焊钉孔的中间位置可能会偏离切刀,从而导致裁切不准确。
技术实现思路
1、本实用新型的目的是提供一种金属容器的塑料提手全自动制作设备,以解决现有金属容器的塑料提手全自动制作设备存在的两个并列的焊钉孔的中间位置偏离切刀的问题。
2、本实用新型提供的一种金属容器的塑料提手全自动制作设备包括:
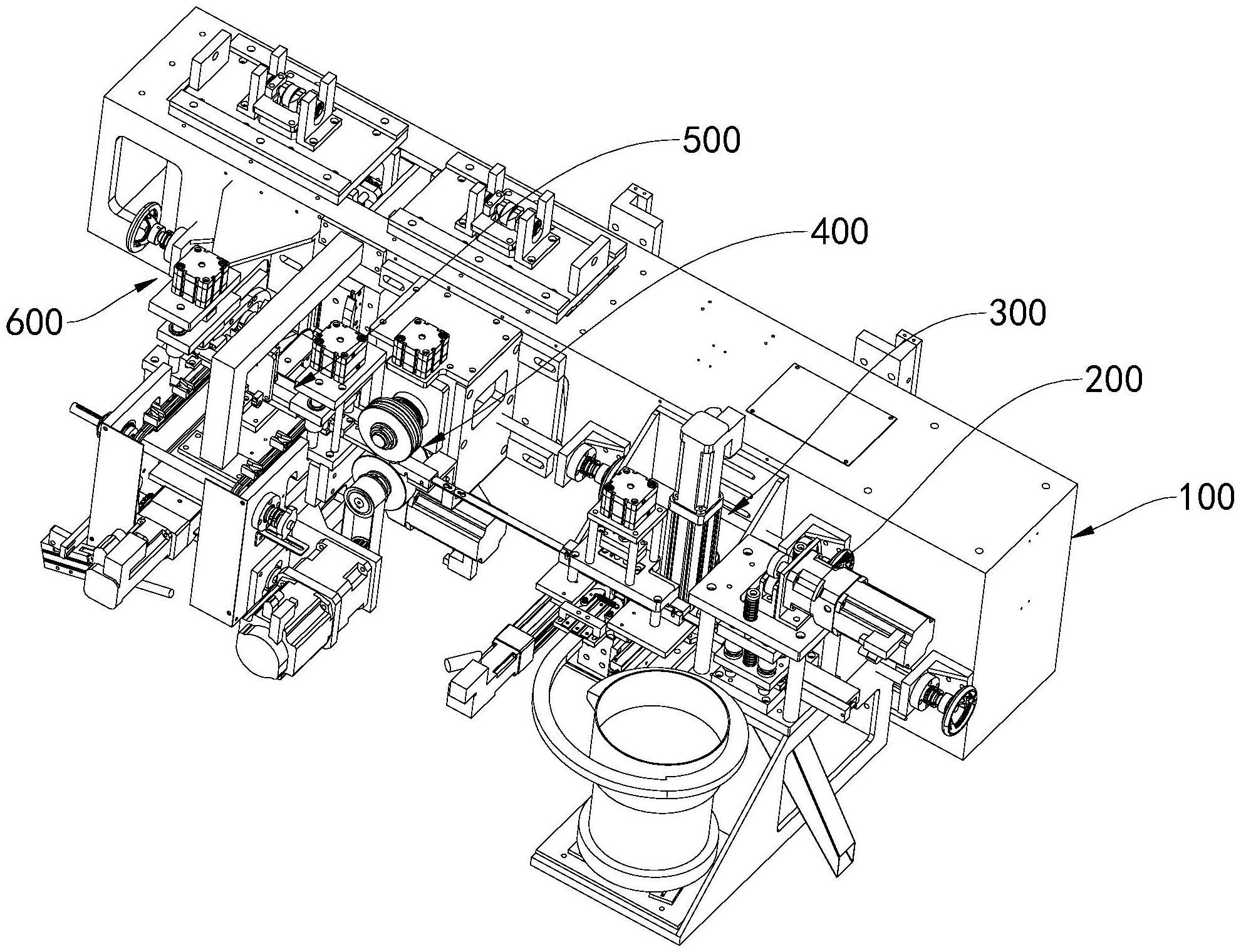
3、机架,包括第一端以及与第一端相对的第二端;以及
4、从机架第一端到第二端依次设置的焊钉孔成型机构、焊钉安装机构、塑料带牵引机构、提手裁切机构、提手折弯及焊接机构;
5、其中:所述塑料带牵引机构包括由固定轮和活动轮组成的牵引轮组,以及驱动所述活动轮与固定轮离合的第一动力机,以在并列的两个焊钉孔输送到提手裁切工位后且在塑料带被裁切之前,驱动所述牵引轮组进入分离状态;所述提手裁切机构包括与焊钉孔对应的定位杆,以及驱动所述定位杆进出焊钉孔的第二动力机,以在所述牵引轮组进入分离状态后且在塑料带被裁切之前,驱动所述定位杆插入焊钉孔。
6、上述设备的塑料带牵引机构包括由固定轮和活动轮组成的牵引轮组,以及驱动所述活动轮与固定轮离合的第一动力机,以在两个并列的焊钉孔输送到提手裁切工位后且在塑料带被裁切之前,驱动所述牵引轮组进入分离状态;结合其提手裁切机构包括与焊钉孔对应的定位杆,以及驱动所述定位杆进出焊钉孔的第二动力机,以在所述牵引轮组进入分离状态后且在塑料带被裁切之前,驱动所述定位杆插入焊钉孔,使得:当塑料带牵引机构输送塑料带的两个并列的焊钉孔到达提手裁切工位后且在被裁切之前,牵引轮组对塑料带的作用力被解除,定位杆插入塑料带上的焊钉孔,通过定位杆与焊钉孔的配合使塑料带上的裁切位置对准提手裁切机构的切刀并固定,能够准确裁切出塑料提手。
7、可选地,所述塑料带牵引机构包括基板和滑块,所述固定轮设置于所述基板,所述活动轮设置于所述滑块,所述滑块对应所述固定轮与所述基板滑动设置,所述滑块可沿着使所述活动轮靠近或远离所述固定轮的方向滑动,所述第一动力机设置于所述基板且与所述滑块连接,所述基板设置于所述机架。
8、可选地,所述固定轮的轴设置有第一齿轮,所述活动轮的轴设置有第二齿轮,所述第二齿轮与所述第一齿轮啮合。
9、可选地,所述固定轮的轮周和/或活动轮的轮周设置有避空槽,所述避空槽与塑料带上的焊钉对应。
10、可选地,所述基板对应牵引轮组的进料侧和出料侧分别设置有塑料带的导向装置。
11、可选地,所述导向装置包括底板和盖板,所述底板和盖板之间设置有供塑料带通过的槽。
12、可选地,所述滑块包括第一块体、第二块体和导向块,所述基板设置有与所述导向块配合的导向孔,所述第一块体和第二块体对应设置于所述基板的前侧和后侧,所述第一块体和第二块体分别与所述导向块连接。
13、可选地,所述导向块对应所述第一块体的中心位置设置,所述活动轮的轴依次贯穿所述第一块体、导向块及第二块体设置于所述滑块。
14、可选地,所述定位杆包括杆身部和杆头部,所述杆身部的直径与所述焊钉孔的孔径相适配,所述杆头部呈锥形结构。
15、可选地,所述定位杆与所述提手裁切机构的刀座连接,所述定位杆的底端低于所述提手裁切机构的切刀的底端。
16、与现有技术相比,本实用新型至少具有以下有益效果:
17、上述设备的塑料带牵引机构包括由固定轮和活动轮组成的牵引轮组,以及驱动所述活动轮与固定轮离合的第一动力机,以在两个并列的焊钉孔输送到提手裁切工位后且在塑料带被裁切之前,驱动所述牵引轮组进入分离状态;结合其提手裁切机构包括与焊钉孔对应的定位杆,以及驱动所述定位杆进出焊钉孔的第二动力机,以在所述牵引轮组进入分离状态后且在塑料带被裁切之前,驱动所述定位杆插入焊钉孔分离状态,使得:当塑料带牵引机构输送塑料带的两个并列的焊钉孔到提手达裁切工位后且在被裁切之前,牵引轮组对塑料带的作用力被解除,定位杆插入塑料带上的焊钉孔,通过定位杆与焊钉孔的配合使塑料带上的裁切位置对准提手裁切机构的切刀并固定,能够准确裁切出塑料提手。此外,定位杆与焊钉孔配合,除了在塑料带的长度方向对塑料带定位,还在塑料带的宽度方向对塑料带定位,可避免塑料带的一端或两端在宽度方向位移。
技术特征:
1.一种金属容器的塑料提手全自动制作设备,包括:
2.根据权利要求1所述的金属容器的塑料提手全自动制作设备,其特征在于:
3.根据权利要求1所述的金属容器的塑料提手全自动制作设备,其特征在于:
4.根据权利要求1所述的金属容器的塑料提手全自动制作设备,其特征在于:
5.根据权利要求2所述的金属容器的塑料提手全自动制作设备,其特征在于:
6.根据权利要求5所述的金属容器的塑料提手全自动制作设备,其特征在于:
7.根据权利要求2所述的金属容器的塑料提手全自动制作设备,其特征在于:
8.根据权利要求7所述的金属容器的塑料提手全自动制作设备,其特征在于:
9.根据权利要求1所述的金属容器的塑料提手全自动制作设备,其特征在于:
10.根据权利要求1所述的金属容器的塑料提手全自动制作设备,其特征在于:
技术总结
一种金属容器的塑料提手全自动制作设备,包括:机架,以及从机架第一端到第二端依次设置的焊钉孔成型机构、焊钉安装机构、塑料带牵引机构、提手裁切机构、提手折弯及焊接机构;所述塑料带牵引机构包括由固定轮和活动轮组成的牵引轮组,以及驱动所述活动轮与固定轮离合的第一动力机,以在两个并列的焊钉孔输送到裁切工位后且在塑料带被裁切之前,驱动所述牵引轮组进入分离状态;所述提手裁切机构包括与焊钉孔对应的定位杆,以及驱动所述定位杆进出焊钉孔的第二动力机,以在所述牵引轮组进入分离状态后且在塑料带被裁切之前,驱动所述定位杆插入焊钉孔。本设备能够在裁切之前将塑料带与切刀对准,能够准确裁切出塑料提手。
技术研发人员:陈俊生,姚伟煌,陈永强
受保护的技术使用者:汕头市新宜制罐设备有限公司
技术研发日:20230602
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!