一种产品取出分离装置的制作方法
本技术涉及注塑自动化领域,特别涉及一种产品取出分离装置。
背景技术:
1、无人全自动生产是目前医疗行业内的大趋势,由于产品外观不同的外形和成型工艺的不同,特定的产品,就需要特定的取出工装配合注塑机和机械手,在塑胶产品注塑成型后将该产品和料头取出,以实现自动化生产。为实现产品生产需求,人们对于注塑机配套产品取出治具的制造工艺要求也越来越高,对塑料件注塑成型产品要求也越来越高,对生产效率要求也越来越高。
2、现有医疗行业,越来越多的医疗器具需要注塑成型产品,这类产品在生产过程中,由于注塑产品的外观和注塑成型工艺的不同,虽然有专门的机械手配合产品的取出,但是机械手是一类通用机械,配备的夹具并不适合每一类塑胶产品,在没有配套夹具的时候,只能人工取放产品和料头,生产过程处于半自动化状态,导致产品不稳定,人为因素的干扰导致产品质量问题,为此,我们提出一种产品取出分离装置。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种产品取出分离装置,注塑机配套产品取出分离装置,空间布局合理,夹取,吸附动作稳定、准确,全自动生产状态下,可以减少生产周期,提高产品的生产效率,可以有效解决背景技术中所体现的问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
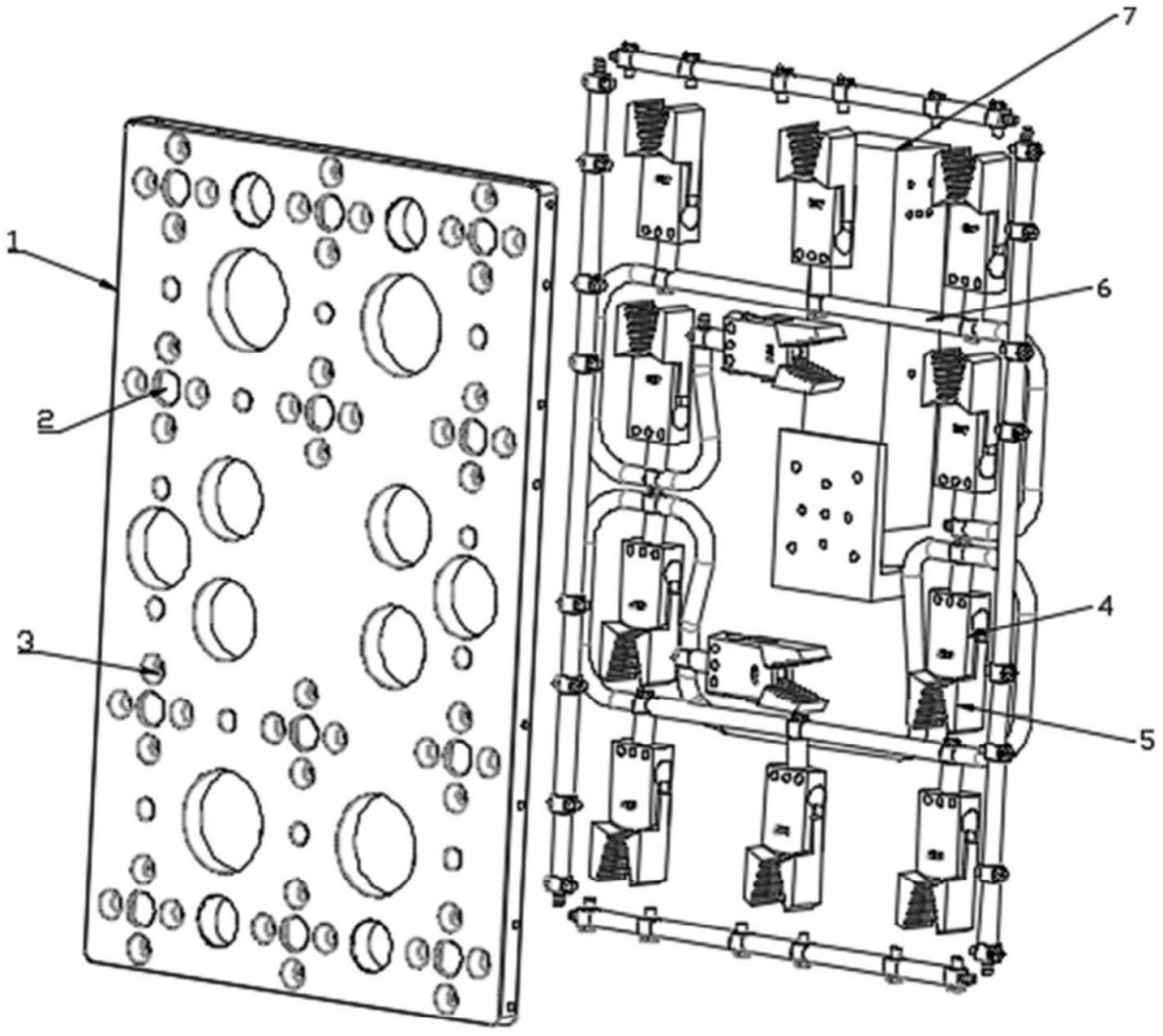
3、一种产品取出分离装置,包括固定板,所述固定板上开设有夹取孔和吸附孔,所述吸附孔的孔壁上开设有真空孔,所述真空孔与吸气设备相连,所述夹取孔后设有夹取设备,所述固定板背面设置有机械臂。
4、进一步优选的技术方案有,所述吸气设备通过电磁阀控制。
5、进一步优选的技术方案有,所述夹取孔和吸附孔在固定板上的排列与注塑机顶出装置相适配,所述吸附孔内相对设置有两个真空孔。
6、进一步优选的技术方案有,所述夹取设备为气动夹钳,所述气动夹钳的夹头与夹取孔的孔面相平行,多个所述气动夹钳通过气管连接成串联气路。
7、进一步优选的技术方案有,所述机械臂为可转动机械臂,所述机械臂通过伸缩臂与滑轨相连。
8、与现有技术相比,本实用新型的有益效果是:本实用新型与注塑机相配合,通过注塑机注塑成型后,将产品和料头顶出至固定板上的吸附孔和夹取孔内,吸附孔真空吸附产品,夹取装置夹取料头,然后机械臂运输完成产品的取出与分离,提高生产效率,注塑成型生产产品过程中,无人参与,实现全自动生产,避免了人为因素的干扰导致产品质量问题。
技术特征:
1.一种产品取出分离装置,其特征在于,包括固定板,所述固定板上开设有夹取孔和吸附孔,所述吸附孔的孔壁上开设有真空孔,所述真空孔与吸气设备相连,所述夹取孔后设有夹取设备,所述固定板背面设置有机械臂。
2.如权利要求1所述的一种产品取出分离装置,其特征在于,所述吸气设备通过电磁阀控制。
3.如权利要求1所述的一种产品取出分离装置,其特征在于,所述夹取孔和吸附孔在固定板上的排列与注塑机顶出装置相适配,所述吸附孔内相对设置有两个真空孔。
4.如权利要求1所述的一种产品取出分离装置,其特征在于,所述夹取设备为气动夹钳,所述气动夹钳的夹头与夹取孔的孔面相平行,多个所述气动夹钳通过气管连接成串联气路。
5.如权利要求1所述的一种产品取出分离装置,其特征在于,所述机械臂为可转动机械臂,所述机械臂通过伸缩臂与滑轨相连。
技术总结
本技术公开了一种产品取出分离装置,特点是包括固定板,所述固定板上开设有夹取孔和吸附孔,所述吸附孔的孔壁上开设有真空孔,所述真空孔与吸气设备相连,所述夹取孔后设有夹取设备,所述固定板背面设置有机械臂,优点是本技术与注塑机相配合,通过注塑机注塑成型后,将产品和料头顶出至固定板上的吸附孔和夹取孔内,吸附孔真空吸附产品,夹取装置夹取料头,然后机械臂运输完成产品的取出与分离,提高生产效率,注塑成型生产产品过程中,无人参与,实现全自动生产,避免了人为因素的干扰导致产品质量问题。
技术研发人员:蒋守龙
受保护的技术使用者:浙江娇阳生物医疗科技有限公司
技术研发日:20230615
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!