一种笔记本电脑上盖联机加工系统的制作方法
本技术涉及一种笔记本电脑上盖联机加工系统,属于笔记本电脑外壳生产设备。
背景技术:
1、笔记本电脑外壳是笔记本电脑的重要组成部分,其主要的生产、加工步骤包括注塑、打磨、切料头、印刷等。目前,笔记本电脑外壳的生产工艺中,各个步骤均通过人工操作设备进行,对操作人员的熟料度有较高的要求,并且普遍存在效率较低、人工成本高、产品质量一致性差等缺点。
技术实现思路
1、本实用新型的目的在于,提供一种笔记本电脑上盖联机加工系统,可实现产品自模具取出后自动打磨应力痕,自动冲切料头。无需二次人工作业,可达到高良率高效率生产。
2、为解决上述技术问题,本实用新型采用如下的技术方案:
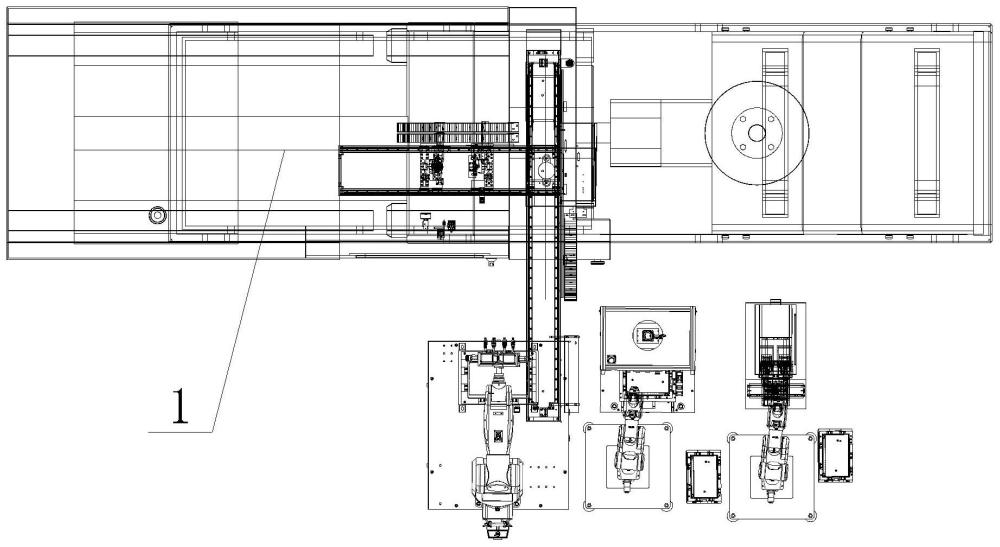
3、一种笔记本电脑上盖联机加工系统,位于注塑机的一侧,包括机台物料转移装置、应力痕打磨装置、切料头装置第一机器人和第二机器人;机台物料转移装置包括平移轨道,平移轨道的一端位于注塑机的下料端的上方,平移轨道的另一端位于第一机器人的上料位的上方;平移轨道上设置有平移装置,平移装置上设置有升降装置,升降装置的升降端朝向下方,升降装置的升降端上安装有机械手;所述应力痕打磨装置位于注塑机的一侧,第一机器人位于应力痕打磨装置的一侧,应力痕打磨装置位于第一机器人的工作范围内;切料头装置位于应力痕打磨装置的一侧,第二机器人位于切料头装置的一侧,切料头装置位于第二机器人的工作范围内。
4、前述的一种笔记本电脑上盖联机加工系统中,所述第一机器人是612型六轴机器人,所述第二机器人是603型工业机器人。
5、前述的一种笔记本电脑上盖联机加工系统中,还包括周转治具、第三机器人、移印装置和烘烤治具,周转治具位于第二机器人的工作范围内,第三机器人位于周转治具的一侧,周转治具位于第三机器人的工作范围内;移印装置位于第三机器人的工作范围内,烘烤治具位于第三机器人的工作范围内。
6、前述的一种笔记本电脑上盖联机加工系统中,所述周转治具上具有对笔记本电脑上盖起定位作用的定位结构,所述第三机器人是603型工业机器人。
7、与现有技术相比,本实用新型可实现产品自模具取出后自动打磨应力痕,自动冲切料头,自动印刷。无需二次人工作业,可达到高良率高效率生产。相对于现有技术具有以下优点:1.简化作业步骤,降低人员作业强度,节省人力(由原来13人精简为4人);2.合并制程,缩短生产周期,提升生产效率;3.标准作业流程,提升产品品质
技术特征:
1.一种笔记本电脑上盖联机加工系统,其特征在于,位于注塑机(1)的一侧,包括机台物料转移装置、应力痕打磨装置(3)、切料头装置(5)、第一机器人(2)和第二机器人(10);机台物料转移装置包括平移轨道(4),平移轨道(4)的一端位于注塑机(1)的下料端的上方,平移轨道(4)的另一端位于第一机器人(2)的上料位的上方;平移轨道(4)上设置有平移装置,平移装置上设置有升降装置,升降装置的升降端朝向下方,升降装置的升降端上安装有机械手;所述应力痕打磨装置(3)位于注塑机(1)的一侧,第一机器人(2)位于应力痕打磨装置(3)的一侧,应力痕打磨装置(3)位于第一机器人(2)的工作范围内;切料头装置(5)位于应力痕打磨装置(3)的一侧,第二机器人(10)位于切料头装置(5)的一侧,切料头装置(5)位于第二机器人(10)的工作范围内。
2.根据权利要求1所述的一种笔记本电脑上盖联机加工系统,其特征在于,所述第一机器人(2)是612型六轴机器人,所述第二机器人(10)是603型工业机器人。
3.根据权利要求1所述的一种笔记本电脑上盖联机加工系统,其特征在于,还包括周转治具(9)、第三机器人(8)、移印装置(6)和烘烤治具(7),周转治具(9)位于第二机器人(10)的工作范围内,第三机器人(8)位于周转治具(9)的一侧,周转治具(9)位于第三机器人(8)的工作范围内;移印装置(6)位于第三机器人(8)的工作范围内,烘烤治具(7)位于第三机器人(8)的工作范围内。
4.根据权利要求3所述的一种笔记本电脑上盖联机加工系统,其特征在于,所述周转治具(9)上具有对笔记本电脑上盖起定位作用的定位结构,所述第三机器人(8)是603型工业机器人。
技术总结
本技术公开了一种笔记本电脑上盖联机加工系统,位于注塑机的一侧,包括机台物料转移装置、应力痕打磨装置、切料头装置第一机器人和第二机器人;机台物料转移装置包括平移轨道,平移轨道的一端位于注塑机的下料端的上方,平移轨道的另一端位于第一机器人的上料位的上方;平移轨道上设置有升降装置,升降装置的升降端朝向下方,升降装置的升降端上安装有机械手;所述应力痕打磨装置位于注塑机的一侧,第一机器人位于应力痕打磨装置的一侧,应力痕打磨装置位于第一机器人的工作范围内;切料头装置位于应力痕打磨装置的一侧,第二机器人位于切料头装置的一侧。可实现产品自模具取出后自动打磨应力痕,自动冲切料头,自动印刷。
技术研发人员:田志忠,张东,程超华
受保护的技术使用者:重庆禾裕田精密电子有限公司
技术研发日:20230831
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!