一种采用多向限震锁模结构的高精度二板电动注塑机的制作方法
本发明属于二板电动注塑机,具体涉及一种采用多向限震锁模结构的高精度二板电动注塑机。
背景技术:
1、随着材料技术的发展,塑料部件也有越做越大、越做越重的趋势,这就导致有关配套注塑厂家所选的注塑机锁模力吨位也越来越大,对于2 000 t 以上的大吨位注塑机而言,国外大都选用二板注塑机(直压方式锁模),而国内绝大多数厂家则选用三板注塑机(曲轴方式锁模),由于二板注塑机的精确度以及制品的外观和质量都要好于三板注塑机,因此目前国内也已经开始逐渐采用了二板注塑机的技术。
2、目前二板注塑机通常是通过梁式结构作为底座,在底座上固定设置有静模块和滑动设置有动模块,需要注塑的大吨位物体放置在静模块和动模块之间的底座上,同时通过四个高压液压缸作为驱动件驱动动模板推动大吨位的物体向静模块运动以此实现锁模,当锁模完成之后,进行注射操作,最后再进行开模,同时,注塑机在注塑时是通过动模块将待注塑件推向静模块,此时待注塑件就沿着梁式结构底座的梁滑动,从而使得待注塑件的重心位置沿着梁式结构底座的梁不断变化,此梁式结构底座可以很好的适应中小型注塑机。
3、但目前的二板注塑机使用时在精度方面仍存在一些问题:由于面对的是大吨位的物体,在锁模的过程中,大吨位物体的重心是从动模块向静模块不断移动,大吨位物体下方的底座受力点也是不断变化,当锁模完成的时候,动模块和静模块刚好将大吨位物体压紧,此时大吨位物体的重心也就不移动,大吨位物体下方的底座受力点也不变,底座持续受力,此时由于梁式底座持续受到很重的力相比于受力点不断变化的部分更容易导致底座缓慢发生变形,从而出现倾斜导致后续注塑的精度降低,并且当注塑完成之后,需要进行开模,开模的瞬间大吨位物体会对底座产生一个较大的震动,震动导致的破坏力就可能会导致底座再次发生变形,会导致下一次注塑时的精度进一步降低,对此,提出一种采用多向限震锁模结构的高精度二板电动注塑机。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种采用多向限震锁模结构的高精度二板电动注塑机,解决了由于底座持续受到很重的力相比于受力点不断变化的部分更容易导致底座缓慢发生变形,从而出现倾斜导致后续注塑的精度降低的问题。
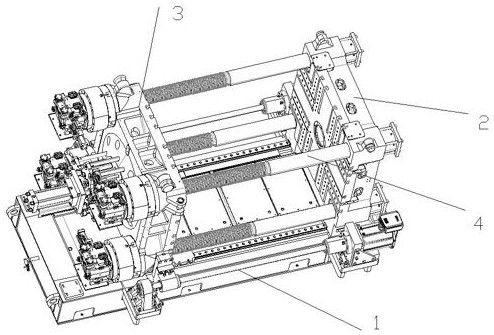
2、本发明的目的可以通过以下技术方案实现:一种采用多向限震锁模结构的高精度二板电动注塑机,包括箱式底座、静模板、动模板和驱动件,靠近静模块处的所述箱式底座内设有用于防止箱式底座变形的减震阻尼机构,所述减震阻尼机构包括分别设置在动模板锁模位置处对应的箱式底座顶壁和侧壁的固定件和与箱式底座顶壁平行设置的阻尼件,所述阻尼件的两端分别与两个固定件铰接,所述驱动件驱动动模板推动大吨位物体向静模板滑动,所述箱式底座通过阻尼件集中震动能量,使箱式底座防止变形。
3、作为本发明进一步的方案,所述箱式底座包括两个靠近静模板的第一矩形箱体和远离静模板的第二矩形箱体,所述第一矩形箱体和第二矩形箱体连接。
4、作为本发明进一步的方案,两个所述第一矩形箱体和第二矩形箱体通过调节螺杆可拆卸地连接为一体。
5、作为本发明进一步的方案,所述第一矩形箱体的长度小于第二矩形箱体的长度。
6、作为本发明进一步的方案,所述第一矩形箱体和第二矩形箱体外部均设有定位孔,所述定位孔配合连接有定位件。
7、作为本发明进一步的方案,所述驱动件为四个电动丝杠,四个所述电动丝杠和注塑机控制系统通信连接。
8、作为本发明进一步的方案,所述电动丝杠的头部均安装有用于监测丝杠移动距离的距离传感器,所述距离传感器和注塑机控制系统通信连接。
9、作为本发明进一步的方案,所述阻尼件包括若干粘滞阻尼器,若干所述粘滞阻尼器串联。
10、作为本发明进一步的方案,所述粘滞阻尼器通过高强度和高塑性的材料制成。
11、本发明的有益效果为:
12、1. 首先通过箱式底座替换了现有技术中的梁式结构作为底座,增加了稳定性;
13、2. 然后通过在箱式底座内设有用于防止箱式底座变形的减震阻尼机构,而减震阻尼机构具体包括了分别设置在动模板锁模位置处对应的箱式底座顶壁和侧壁的固定件和与箱式底座顶壁平行设置的阻尼件,阻尼件和固定件以及箱式底座组成一个很好的阻尼结构,当箱式底座受到震动力较大时,震动力会通过固定件传递到阻尼件,阻尼件会承受较大的剪切力和压力,以此减少了震动力分散在箱式底座上的作用力,以此保护了箱式底座,同时阻尼件通过固定件与箱式底座顶壁和侧壁连接,还可以使得当箱式底座受到震动力要发生变形时,阻尼件有一个拉力,拉着箱式底座顶壁和侧壁,进一步减少变形发生的情况,以此解决了由于底座持续受到很重的力相比于受力点不断变化的部分更容易导致底座缓慢发生变形,从而出现倾斜导致后续注塑的精度降低的问题,
14、3.同时也解决了当注塑完成之后,需要进行开模,开模的瞬间大吨位物体会对底座产生一个较大的震动,震动导致的破坏力就可能会导致底座再次发生变形,会导致下一次注塑时的精度进一步降低的问题。
技术特征:
1.一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,包括箱式底座、静模板、动模板和驱动件,靠近静模块处的所述箱式底座内设有用于防止箱式底座变形的减震阻尼机构,所述减震阻尼机构包括分别设置在动模板锁模位置处对应的箱式底座顶壁和侧壁的固定件和与箱式底座顶壁平行设置的阻尼件,所述减震阻尼机构与动模板锁模位置配合,所述阻尼件的两端分别与两个固定件铰接,所述驱动件驱动动模板推动大吨位物体向静模板滑动,所述箱式底座通过阻尼件集中震动能量,所述阻尼件用于承受剪切力和压力,减少了震动力分散在箱式底座上的作用力,使箱式底座防止变形。
2.根据权利要求1所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,所述箱式底座包括两个靠近静模板的第一矩形箱体和远离静模板的第二矩形箱体,所述第一矩形箱体和第二矩形箱体连接。
3.根据权利要求2所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,两个所述第一矩形箱体和第二矩形箱体通过调节螺杆可拆卸地连接为一体。
4.根据权利要求2所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,所述第一矩形箱体的长度小于第二矩形箱体的长度。
5.根据权利要求4所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,所述第一矩形箱体和第二矩形箱体外部均设有定位孔,所述定位孔配合连接有定位件。
6.根据权利要求1所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,所述驱动件为四个电动丝杠,四个所述电动丝杠和注塑机控制系统通信连接。
7.根据权利要求6所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,所述电动丝杠的头部均安装有用于监测丝杠移动距离的距离传感器,所述距离传感器和注塑机控制系统通信连接。
8.根据权利要求1所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,所述阻尼件包括若干粘滞阻尼器,若干所述粘滞阻尼器串联。
9.根据权利要求8所述的一种采用多向限震锁模结构的高精度二板电动注塑机,其特征在于,所述粘滞阻尼器通过高强度和高塑性的材料制成。
技术总结
本发明涉及一种采用多向限震锁模结构的高精度二板电动注塑机,属于二板电动注塑机技术领域,包括箱式底座、静模板、动模板和驱动件,靠近静模块处的所述箱式底座内设有用于防止箱式底座变形的减震阻尼机构,阻尼件的两端分别与两个固定件铰接,箱式底座通过阻尼件集中震动能量,使箱式底座防止变形,先通过箱式底座替换了现有技术中的梁式结构作为底座,增加了稳定性,然后通过在箱式底座内设有用于防止箱式底座变形的减震阻尼机构,阻尼件和固定件以及箱式底座组成一个很好的阻尼结构,阻尼件会承受较大的剪切力和压力,以此减少了震动力分散在箱式底座上的作用力,以此保护了箱式底座,解决了箱式底座变形的问题。
技术研发人员:袁中华,刘平定,朱康建,孙晓波,朱燕志,杜呈表,郭保福,彭德富,黄国良,林俊彬,邹星
受保护的技术使用者:博创智能装备股份有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!