一种注塑机械手的控制装置的制作方法
本发明涉及机械自动化控制的,具体为一种注塑机械手的控制装置。
背景技术:
1、注塑机,又名注射成型机或注射机,它是将热塑性塑料或热固性塑料利用塑料成型模具制成各种形状的塑料制品的主要成型设备,注塑机能加热塑料,对熔融塑料施加高压,使其射出而充满模具型腔。为了控制注塑机的工作状态,注塑机上都会安装控制装置。
2、根据公开号为:cn203765611u的中国专利,一种注塑生产线上的伺服控制机械手臂装置,其包括机械手臂及分类装置,该机械手臂设置在注塑机顶部,包括通过伺服电机驱动的横行部、引拔部、正臂部及副臂部;多台设有机械手臂的注塑机设置在同一生产线输送带上,所述横行部伸出注塑机外,延伸到输送带上方,所述分类装置设置在生产线输送带的末端;所述伺服控制机械手臂装置还包括视觉检测装置,其包括多个智能摄像头,分别设置在分类装置及正臂部上。
3、在上述方案中,通过位于同一生产线输送带上不同注塑机上的机械手臂的运作,将不同规格型号的注塑产品分别摆放,导致其仍存在如下缺点:该装置未设置对机械手进行限位的装置,导致机械手在对注塑产品进行夹持运输时,容易出现位置的偏差,从而容易导致注塑产品的掉落,进而降低了产品的质量。
技术实现思路
1、本发明的目的是为了提供一种注塑机械手的控制装置,以解决装置未设置对机械手进行限位的装置,导致机械手在对注塑产品进行夹持运输时,容易出现位置的偏差,从而容易导致注塑产品的掉落的问题。
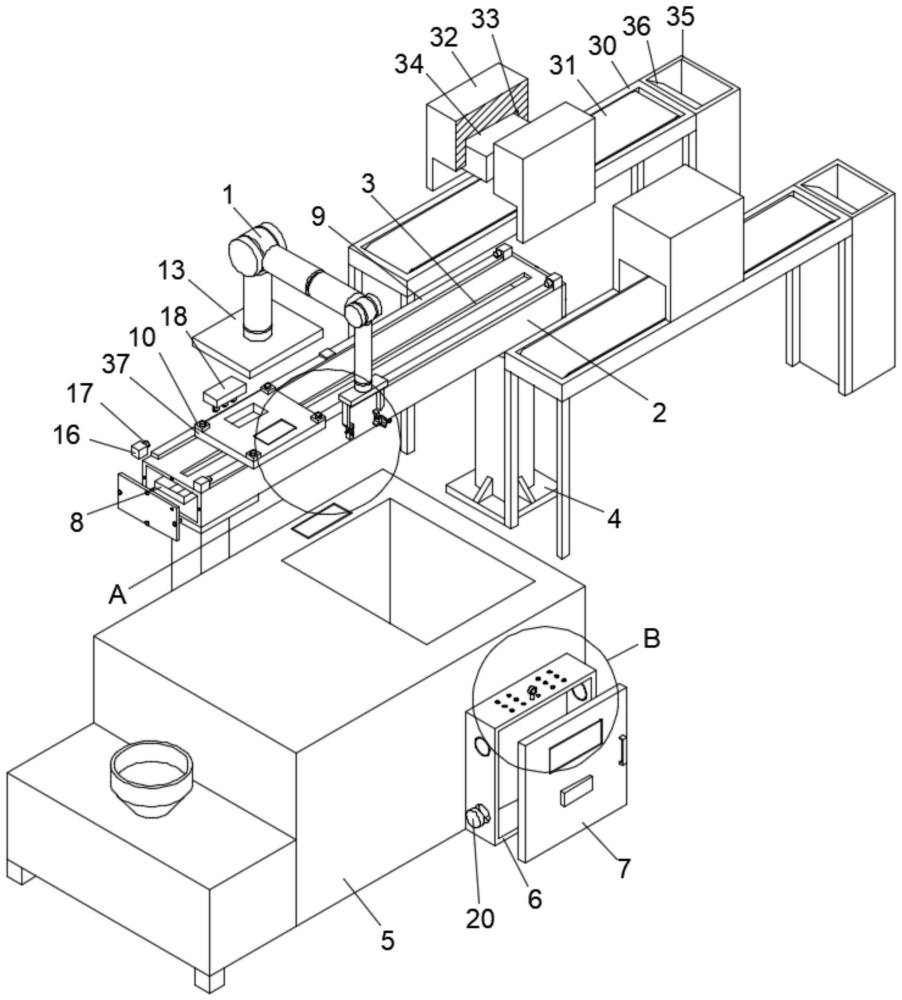
2、为了实现上述发明目的,本发明采用了以下技术方案:一种注塑机械手的控制装置,包括机械手本体,所述机械手本体设置在壳体的上方,所述壳体的顶面贯穿开设有通孔,所述壳体的底面固定有两个支撑柱,所述壳体的右侧设置有注塑机本体,所述注塑机本体的右侧固定有控制箱,所述控制箱的右侧通过合页可转动的设置有防护板,所述防护板的右侧固定有plc控制器,所述机械手本体、注塑机本体均与plc控制器电性连接,所述壳体的内部底面固定有红外线接收器,所述壳体的顶面固定有两个滑轨,所述滑轨滑块的顶面固定有承重板,所述承重板的顶面四个拐角处均固定有压力传感器,所述红外线接收器、滑轨、压力传感器均与plc控制器电性连接,所述承重板的顶面贯穿开设有两个安装孔,右侧所述安装孔的内壁固定有红外线发射器,所述压力传感器的顶端固定有连接板,所述机械手本体的底面与连接板的顶面相固定,所述注塑机本体的顶面开设有安装槽,所述安装槽的内壁固定有光电传感器,所述红外线发射器、光电传感器均与plc控制器电性连接。
3、优选的,所述壳体的顶面四个拐角处均固定有阻挡块,所述阻挡块的外壁固定有橡胶柱。
4、优选的,左侧所述安装孔的内壁固定有支撑块,所述支撑块的底面转动设置有若干个滚轮,所述滚轮与壳体的顶面相接触。
5、优选的,所述控制箱的前侧与后侧均贯穿开设有两个固定孔,所述固定孔的内壁固定有风机,所述风机与plc控制器电性连接,所述控制箱的顶面贯穿开设有若干个连接孔,所述连接孔的内壁固定有过滤网。
6、优选的,所述控制箱的顶面贯穿开设有容纳孔,所述容纳孔的内壁固定有温度传感器,所述温度传感器与plc控制器电性连接,所述温度传感器的感应端延伸至控制箱内。
7、优选的,所述机械手本体的两个夹爪相互靠近的两侧均固定有夹持块,所述夹持块的内壁贯穿开设有限位孔,所述夹持块的内壁设置有限位块,所述限位块的前侧固定有限位柱,所述限位柱与限位孔滑动设置,所述限位柱的外壁缠绕有弹簧,所述弹簧的一端与夹持块的内壁相固定,所述弹簧的另一端与限位柱的外壁相固定。
8、优选的,所述壳体的左右两侧均固定有安装架,所述安装架的内壁固定有传送带,所述传送带与plc控制器电性连接,所述安装架的顶面固定有安装框,所述安装框的内部顶面开设有固定槽,所述固定槽的内壁固定有冷却模块,所述冷却模块与plc控制器电性连接。
9、优选的,所述安装架的前侧放置有收集盒,所述收集盒的内壁后侧固定有导流板。
10、本发明还提供了一种注塑机械手控制装置的控制方法,具体步骤如下:
11、s1:可先通过plc控制器启动机械手本体,当机械手本体在夹持注塑产品后,压力传感器会进行重力感应,从而将信号通过plc控制器传输至滑轨上;
12、s2:此时,滑轨将带动承重板进行移动,直至承重板与右侧两个缓冲装置进行接触,此时,机械手本体会将注塑产品放置传送装置上进行传送;
13、s3:当机械手本体下过料后,压力传感器会进行重力感应,从而将信号通过plc控制器传输至滑轨,滑轨将带动承重板进行返程运动;
14、s4:此时,当红外线接收器接收到红外线发射器的信号时,滑轨会停止运动,同时,光电传感器将对机械手本体的位置进行感应,从而通过plc控制器进行指导夹取注塑产品。
15、与现有技术相比,采用了上述技术方案的一种注塑机械手的控制装置,具有如下有益效果:
16、一、通过红外线接收器、压力传感器、红外线发射器的配合,可实现对机械手本体的精准定位,使机械手本体可准确的对注塑产品进行夹持固定移动,从而实现注塑产品的转移和定位,进而提高生产效率,减少人工操作的时间和劳动强度,并确保注塑产品移动过程的准确性和可靠性。通过橡胶柱可为承重板提供减震和缓冲效果,当承重板在移动过程中与橡胶柱接触,橡胶柱能够吸收部分冲击力和振动,减少对机械手本体的冲击,防止了注塑产品从机械手本体上掉落,从而机械手本体与注塑产品的完整性。通过支撑块可在承重板移动时提供稳定的支撑,从而在滚轮的作用下降低承重板与壳体顶面之间的摩擦力,使承重板移动更加流畅和轻松,减少能量损耗并提高效率,同时,可以降低设备的噪音和振动,提升工作环境的舒适度;
17、二、通过风机可以提高控制箱内部空气的流通速度,从而将控制箱内部电器产生的热量带走,有效降低控制箱内部的温度,保证电器设备的正常工作温度范围,同时,通过过滤网可阻止灰尘、杂质等颗粒进入控制箱内部,确保空气流通中的净化效果,从而维护控制箱内部电器设备的工作环境。通过温度传感器可对控制箱的温度进行感应,当温度超过设定阈值时,温度传感器可以触发相应的报警或控制机制,从而温度传感器可将信号通过plc控制器传输至风机上,使风机可对控制箱内部进行降温,保护控制箱内的电气设备不受过热影响;
18、三、通过夹持块与限位块的配合,可对注塑产品进行夹持,使注塑产品在机械手本体的作用下进行移动,同时,通过限位柱与弹簧的配合,可在机械手本体对注塑产品进行夹持时进行缓冲,防止夹持力度过大导致注塑产品的损坏,从而提高了注塑产品的完整性;
19、四、通过传送带可对注塑后的产品进行传输,使注塑后的产品在冷却模块的作用下进行降温冷却,从而防止注塑后的产品之间出现粘连现象,进而提高了注塑产品的质量。通过收集盒可对注塑后的产品进行集中收集,从而方便工作人员对产品进行后续加工处理,进而节省了大量的劳动成本。
技术特征:
1.一种注塑机械手的控制装置,包括机械手本体(1),所述机械手本体(1)设置在壳体(2)的上方,其特征在于,所述壳体(2)的顶面贯穿开设有通孔(3),所述壳体(2)的底面固定有两个支撑柱(4),所述壳体(2)的右侧设置有注塑机本体(5),所述注塑机本体(5)的右侧固定有控制箱(6),所述控制箱(6)的右侧通过合页可转动的设置有防护板(7),所述防护板(7)的右侧固定有plc控制器,所述机械手本体(1)、注塑机本体(5)均与plc控制器电性连接,所述壳体(2)的内部底面固定有红外线接收器(8),所述壳体(2)的顶面固定有两个滑轨(9),所述滑轨(9)滑块的顶面固定有承重板(37),所述承重板(37)的顶面四个拐角处均固定有压力传感器(10),所述红外线接收器(8)、滑轨(9)、压力传感器(10)均与plc控制器电性连接,所述承重板(37)的顶面贯穿开设有两个安装孔(11),右侧所述安装孔(11)的内壁固定有红外线发射器(12),所述压力传感器(10)的顶端固定有连接板(13),所述机械手本体(1)的底面与连接板(13)的顶面相固定,所述注塑机本体(5)的顶面开设有安装槽(14),所述安装槽(14)的内壁固定有光电传感器(15),所述红外线发射器(12)、光电传感器(15)均与plc控制器电性连接。
2.根据权利要求1所述的一种注塑机械手的控制装置,其特征在于:所述壳体(2)的顶面四个拐角处均固定有阻挡块(16),所述阻挡块(16)的外壁固定有橡胶柱(17)。
3.根据权利要求2所述的一种注塑机械手的控制装置,其特征在于:左侧所述安装孔(11)的内壁固定有支撑块(18),所述支撑块(18)的底面转动设置有若干个滚轮,所述滚轮与壳体(2)的顶面相接触。
4.根据权利要求3所述的一种注塑机械手的控制装置,其特征在于:所述控制箱(6)的前侧与后侧均贯穿开设有两个固定孔(19),所述固定孔(19)的内壁固定有风机(20),所述风机(20)与plc控制器电性连接,所述控制箱(6)的顶面贯穿开设有若干个连接孔(21),所述连接孔(21)的内壁固定有过滤网(22)。
5.根据权利要求4所述的一种注塑机械手的控制装置,其特征在于:所述控制箱(6)的顶面贯穿开设有容纳孔(23),所述容纳孔(23)的内壁固定有温度传感器(24),所述温度传感器(24)与plc控制器电性连接,所述温度传感器(24)的感应端延伸至控制箱(6)内。
6.根据权利要求1所述的一种注塑机械手的控制装置,其特征在于:所述机械手本体(1)的两个夹爪相互靠近的两侧均固定有夹持块(25),所述夹持块(25)的内壁贯穿开设有限位孔(26),所述夹持块(25)的内壁设置有限位块(27),所述限位块(27)的前侧固定有限位柱(28),所述限位柱(28)与限位孔(26)滑动设置,所述限位柱(28)的外壁缠绕有弹簧(29),所述弹簧(29)的一端与夹持块(25)的内壁相固定,所述弹簧(29)的另一端与限位柱(28)的外壁相固定。
7.根据权利要求6所述的一种注塑机械手的控制装置,其特征在于:所述壳体(2)的左右两侧均固定有安装架(30),所述安装架(30)的内壁固定有传送带(31),所述传送带(31)与plc控制器电性连接,所述安装架(30)的顶面固定有安装框(32),所述安装框(32)的内部顶面开设有固定槽(33),所述固定槽(33)的内壁固定有冷却模块(34),所述冷却模块(34)与plc控制器电性连接。
8.根据权利要求7所述的一种注塑机械手的控制装置,其特征在于:所述安装架(30)的前侧放置有收集盒(35),所述收集盒(35)的内壁后侧固定有导流板(36)。
9.一种注塑机械手控制装置的控制方法,具体步骤如下:
技术总结
本发明涉及机械自动化控制的领域,公开了一种注塑机械手的控制装置,包括机械手本体,所述机械手本体设置在壳体的上方,所述壳体的顶面贯穿开设有通孔,所述壳体的底面固定有两个支撑柱,所述壳体的右侧设置有注塑机本体,所述注塑机本体的右侧固定有控制箱,所述控制箱的右侧通过合页可转动的设置有防护板,所述防护板的右侧固定有PLC控制器,所述机械手本体、注塑机本体均与PLC控制器电性连接。在本发明中,通过红外线接收器、压力传感器、红外线发射器的配合,可实现对机械手本体的精准定位,使机械手本体可准确的对注塑产品进行夹持固定移动,从而实现注塑产品的转移和定位,减少人工操作的时间和劳动强度,并确保注塑产品移动过程的准确性。
技术研发人员:朱见松,徐旺
受保护的技术使用者:浙江海奕博智能设备制造有限公司
技术研发日:
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!