一种异形零件的贴装方法、装置、电子设备及存储介质与流程
本发明涉及机器视觉,尤其涉及一种异形零件的贴装方法、装置、电子设备及存储介质。
背景技术:
1、随着3c电子时代的变迁,整体组装工艺的需求很高,如耳机上下壳组装工艺,为了避免错位组装造成的触感、美观等用户体验感下降的问题,必须将上下壳完美组装,极大缩小各位置上的台阶大小,这对原有的人工组装工艺要求极高,人眼分辨极限在0.1mm左右,但整体的组装工艺精度要求已经达到10um以内,原有的组装方式已不可取,满足不了后续工艺质控要求,因此该类非对称性的异形零件组装需求急需解决。
技术实现思路
1、本发明提供了一种异形零件的贴装方法、装置、电子设备及存储介质,不仅可以提高对异形零件的组装效果,而且还可以提高对异形零件的组装效率。
2、根据本发明的一方面,提供了一种异形零件的贴装方法,包括:
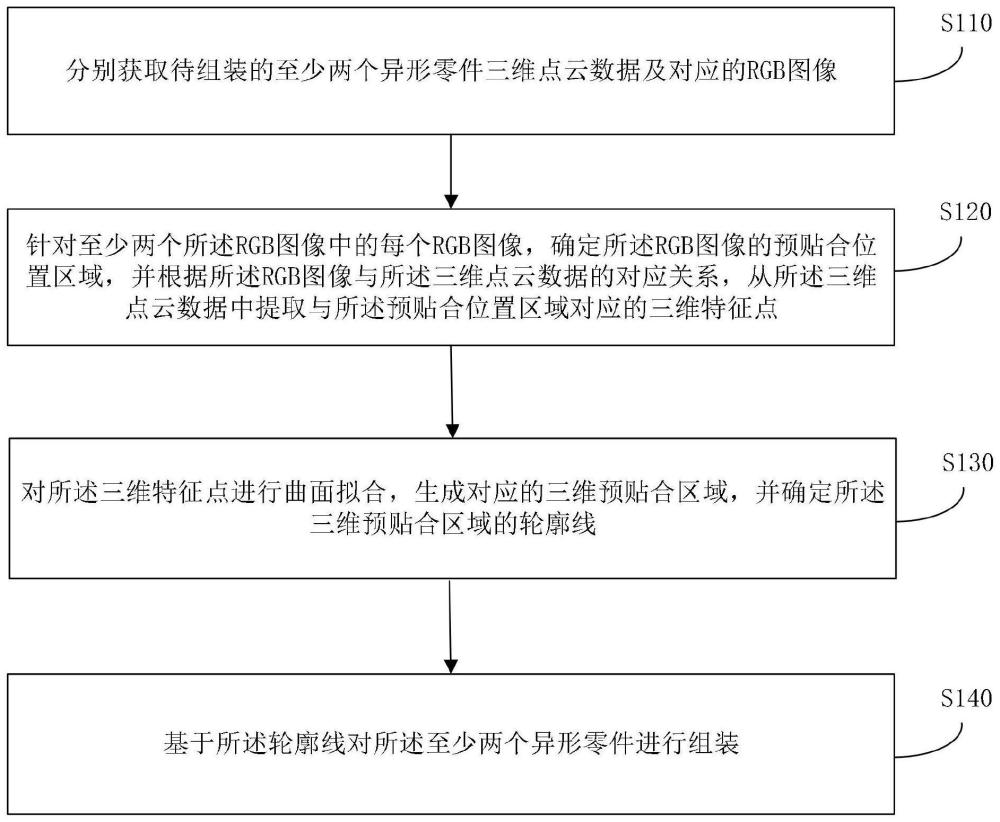
3、分别获取待组装的至少两个异形零件三维点云数据及对应的rgb图像;
4、针对至少两个所述rgb图像中的每个rgb图像,确定所述rgb图像的预贴合位置区域,并根据所述rgb图像与所述三维点云数据的对应关系,从所述三维点云数据中提取与所述预贴合位置区域对应的三维特征点;
5、对所述三维特征点进行曲面拟合,生成对应的三维预贴合区域,并确定所述三维预贴合区域的轮廓线;
6、基于所述轮廓线对所述至少两个异形零件进行组装。
7、根据本发明的另一方面,提供了一种异形零件的贴装装置,包括:
8、点云数据获取模块,用于分别获取待组装的至少两个异形零件三维点云数据及对应的rgb图像;
9、特征点提取模块,用于针对至少两个所述rgb图像中的每个rgb图像,确定所述rgb图像的预贴合位置区域,并根据所述rgb图像与所述三维点云数据的对应关系,从所述三维点云数据中提取与所述预贴合位置区域对应的三维特征点;
10、轮廓线确定模块,用于对所述三维特征点进行曲面拟合,生成对应的三维预贴合区域,并确定所述三维预贴合区域的轮廓线;
11、零件组装模块,用于基于所述轮廓线对所述至少两个异形零件进行组装。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的异形零件的贴装方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的异形零件的贴装方法。
17、本发明实施例的异形零件的贴装方案,分别获取待组装的至少两个异形零件三维点云数据及对应的rgb图像;针对至少两个所述rgb图像中的每个rgb图像,确定所述rgb图像的预贴合位置区域,并根据所述rgb图像与所述三维点云数据的对应关系,从所述三维点云数据中提取与所述预贴合位置区域对应的三维特征点;对所述三维特征点进行曲面拟合,生成对应的三维预贴合区域,并确定所述三维预贴合区域的轮廓线;基于所述轮廓线对所述至少两个异形零件进行组装。通过本发明实施例提供的技术方案,不仅可以提高对异形零件的组装效果,而且还可以提高对异形零件的组装效率。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种异形零件的贴装方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于所述轮廓线对所述至少两个异形零件进行组装,包括:
3.根据权利要求2所述的方法,其特征在于,当所述距离满足预设条件时,基于所述轮廓线上的对位特征点对所述至少两个异形零件进行组装,包括:
4.根据权利要求2所述的方法,其特征在于,还包括:
5.根据权利要求1所述的方法,其特征在于,在确定所述三维预贴合区域的轮廓线之前,还包括:
6.根据权利要求5所述的方法,其特征在于,基于所述外边界及所述三维预贴合区域对应的异形零件的三维图纸,构建与所述三维预贴合区域对应的三维真实贴合区域,包括:
7.根据权利要求1所述的方法,其特征在于,在根据所述rgb图像与所述三维点云数据的对应关系,从所述三维点云数据中提取与所述预贴合位置区域对应的三维特征点之前,还包括:
8.一种异形零件的贴装装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的异形零件的贴装方法。
技术总结
本发明公开了一种异形零件的贴装方法、装置、电子设备及存储介质。所述方法包括:分别获取待组装的至少两个异形零件三维点云数据及对应的RGB图像;针对至少两个所述RGB图像中的每个RGB图像,确定所述RGB图像的预贴合位置区域,并根据所述RGB图像与所述三维点云数据的对应关系,从所述三维点云数据中提取与所述预贴合位置区域对应的三维特征点;对所述三维特征点进行曲面拟合,生成对应的三维预贴合区域,并确定所述三维预贴合区域的轮廓线;基于所述轮廓线对所述至少两个异形零件进行组装。通过本发明实施例提供的技术方案,不仅可以提高对异形零件的组装效果,而且还可以提高对异形零件的组装效率。
技术研发人员:姜华
受保护的技术使用者:苏州凌云视界智能设备有限责任公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!