铺丝机器人及双机器人式自动铺丝系统的制作方法
本发明涉及铺丝设备,尤其是涉及一种铺丝机器人及双机器人式自动铺丝系统。
背景技术:
1、碳纤维复合材料具有轻质量及高强度等优点,逐渐应用在汽车及航空航天等领域,作为替代金属或合金外壳的材料。而对于复合材料构件的制造大多需要通过铺丝机将形成丝带状的碳纤维复合材料铺设在与相应构件形态一致的铺设平台上,通过铺设及固化等工序后,能够形成对应形状的碳纤维复合材料构件。
2、但由于构件的大小和形状多样,尤其是一些小型构件,其形态变化的趋势较大,因此,需要铺丝机具有更加灵活的动作以适应小型构件的加工成型,而现有的铺丝机较难适应变化趋势较大的较小构件的铺丝作业。
3、因此,急需提供一种铺丝机器人及双机器人式自动铺丝系统,以在一定程度上解决现有技术中存在的问题。
技术实现思路
1、本发明的目的在于提供一种铺丝机器人及双机器人式自动铺丝系统,以在一定程度上解决现有铺丝机较难适应变化趋势较大的较小构件的铺丝制造作业。
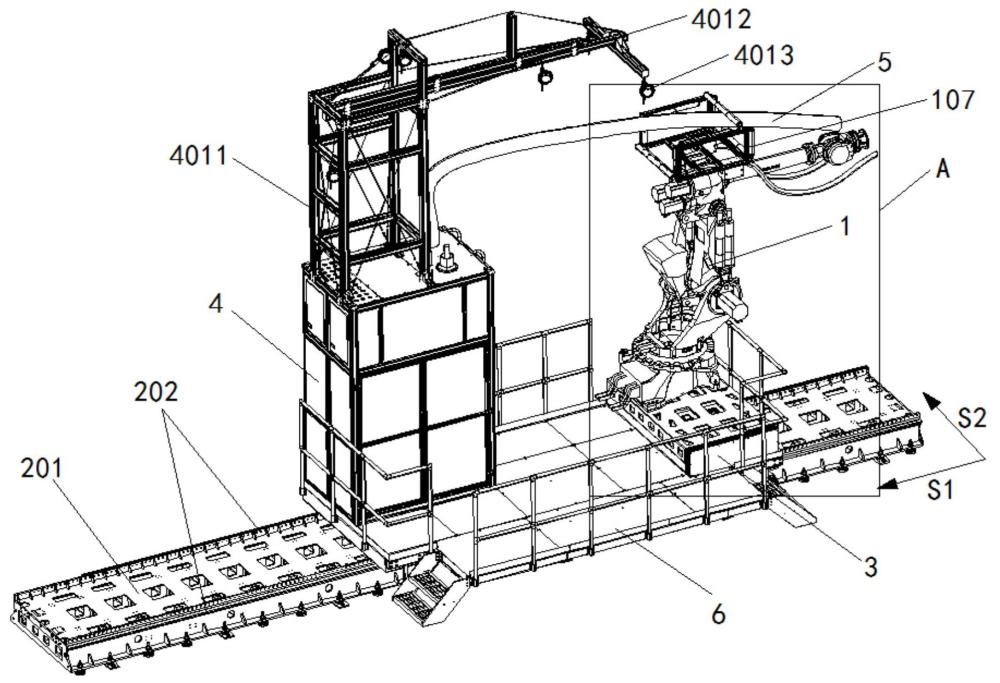
2、本发明提供的一种铺丝机器人,包括机械臂、第一轨道机构、承载机构以及铺丝头;所述第一轨道机构沿第一方向延伸,所述承载机构设置于所述第一轨道机构上,且能够沿所述第一方向运动;所述承载机构包括承载台和承载座,所述承载台沿第二方向延伸,且与所述第一轨道机构相连接,所述承载座设置于所述承载台上,所述机械臂的一端与所述承载座转动连接,所述机械臂的另一端与所述铺丝头相连接,所述承载座能够相对所述承载台沿所述第二方向运动,以带动所述机械臂运动。
3、其中,所述机械臂包括支臂组件及连接臂组件,且所述支臂组件包括第一支臂、第二支臂、第三支臂;所述第一支臂的一端与所述承载座转动连接,所述第一支臂相对所述承载座的转轴轴线沿竖直方向延伸,所述第一支臂的另一端与所述第二支臂的一端转动连接,且所述第二支臂的转动轴线沿所述第二方向延伸;所述第三支臂的一端与所述第二支臂远离所述第一支臂的一端转动连接,且所述第三支臂的转动轴线沿所述第二方向延伸;所述连接臂组件与所述第三支臂远离所述第二支臂的一端相连接。
4、具体地,所述连接臂组件包括第一连接臂、第二连接臂以及安装座;所述第一连接臂的一端与所述第三支臂远离所述第二支臂的一端转动连接,且所述第一连接臂的转动轴线沿所述第一方向延伸;所述第二连接臂的一端与所述第一连接臂远离所述第三支臂的一端转动连接,且所述第二连接臂的转动轴线沿所述第一方向延伸;所述安装座与所述第二连接臂远离所述第一连接臂的一端相连接,且所述安装座能够相对所述第二连接臂旋转,且所述安装座的旋转轴沿所述第二方向延伸。
5、进一步地,所述第一轨道机构包括轨道支架和导向轨道;所述轨道支架沿所述第一方向铺设于地面上,所述导向轨道沿所述第一方向铺设于所述轨道支架上,所述承载机构对应所述导向轨道的位置设有驱动机构,以使所述承载机构能够沿所述第一方向运动。
6、其中,本发明提供的铺丝机器人,还包括送料箱、送料管以及作业平台;所述承载机构和所述送料箱均设置于所述作业平台上,所述作业平台设置于所述第一轨道机构上,且所述作业平台能够相对所述第一轨道机构沿所述第一方向往复运动;所述送料箱的出料口与所述送料管的一端相连接,所述送料管的另一端与所述铺丝头的进料口相连接。
7、具体地,所述机械臂上设有第一支撑架,所述第一支撑架上形成有多个承托空间,所述送料管的一端穿过多个所述承托空间与所述铺丝头相连接。
8、进一步地,所述第一支撑架包括第一架体和多个导向辊,多个所述导向辊套设在所述第一架体上,且能够相对所述第一架体转动,所述送料管的外壁与所述导向辊相接触,以使所述送料管能够相对所述第一架体滑动。
9、更进一步地,所述送料箱上设有第二支撑架,所述第二支撑架包括第二架体、延伸杆以及多个挂钩;所述第二架体设置于所述送料箱的顶部,且沿竖直方向延伸,所述延伸杆设置于所述第二架体的顶部,且沿所述第一方向延伸,所述延伸杆远离所述第二架体的一端接近所述机械臂设置;所述多个所述挂钩分别设置在所述第二架体和所述延伸杆上,用于承载悬挂所述送料管。
10、相对于现有技术,本发明提供的铺丝机器人具有以下优势:
11、本发明提供的铺丝机器人,包括机械臂、第一轨道机构、承载机构以及铺丝头;第一轨道机构沿第一方向延伸,承载机构设置于第一轨道机构上,且能够沿第一方向运动;承载机构包括承载台和承载座,承载台沿第二方向延伸,且与第一轨道机构相连接,承载座设置于承载台上,机械臂的一端与承载座转动连接,机械臂的另一端与铺丝头相连接,承载座能够相对承载台沿第二方向运动,以带动机械臂运动。
12、由此分析可知,通过沿第一方向延伸的第一轨道机构,且承载机构设置在第一轨道机构上,从而能够使承载机构沿第一方向往复运动,而通过使机械臂设置在承载机构上,因此,使机械臂也具有沿第一方向往复运动的自由度。
13、并且,由于本申请中的承载机构包括承载台和承载座,且承载台沿第二方向延伸,承载座能够在承载台上沿第二方向往复运动,因此,通过使机械臂设置在承载座上,能够使机械臂也具有沿第二方向往复运动的自由度。
14、进一步地,由于本申请中机械臂的一端与承载座转动连接,且机械臂的另一端与铺丝头相连接,因此,本申请中的机械臂具有三个自由度的动作空间,而由于机械臂本身能够进行多方向的转动和摆动,因此,本申请中与机械臂相连接的铺丝头具有至少三个自由度的动作空间,从而能够更好地适应变化趋势较大的铺丝作业。
15、此外,本发明还提供一种双机器人式自动铺丝系统,包括上述的铺丝机器人以及回转装置,且所述铺丝机器人的数量为两个,相对设置在所述回转装置的两侧。
16、其中,所述回转装置包括第二轨道机构、第一回转机构和第二回转机构;所述第二轨道机构沿所述第一方向延伸,且所述第一回转机构和所述第二回转机构相对设置在所述第二轨道机构上,且所述第一回转机构和所述第二回转机构能够向互相接近或远离的方向移动。
17、本申请提供的双机器人式自动铺丝系统,在回转装置的两侧分别设有一台铺丝机器人,两台铺丝机器人可同时独立作业,也可配合作业,从而能够在一定程度上提升铺丝作业效率。
技术特征:
1.一种铺丝机器人,其特征在于,包括机械臂、第一轨道机构、承载机构以及铺丝头;
2.根据权利要求1所述的铺丝机器人,其特征在于,所述机械臂包括支臂组件及连接臂组件,且所述支臂组件包括第一支臂、第二支臂、第三支臂;
3.根据权利要求2所述的铺丝机器人,其特征在于,所述连接臂组件包括第一连接臂、第二连接臂以及安装座;
4.根据权利要求1所述的铺丝机器人,其特征在于,所述第一轨道机构包括轨道支架和导向轨道;
5.根据权利要求1所述的铺丝机器人,其特征在于,还包括送料箱、送料管以及作业平台;
6.根据权利要求5所述的铺丝机器人,其特征在于,所述机械臂上设有第一支撑架,所述第一支撑架上形成有多个承托空间,所述送料管的一端穿过多个所述承托空间与所述铺丝头相连接。
7.根据权利要求6所述的铺丝机器人,其特征在于,所述第一支撑架包括第一架体和多个导向辊,多个所述导向辊套设在所述第一架体上,且能够相对所述第一架体转动,所述送料管的外壁与所述导向辊相接触,以使所述送料管能够相对所述第一架体滑动。
8.根据权利要求5所述的铺丝机器人,其特征在于,所述送料箱上设有第二支撑架,所述第二支撑架包括第二架体、延伸杆以及多个挂钩;
9.一种双机器人式自动铺丝系统,其特征在于,包括上述权利要求1-8中任一项所述的铺丝机器人以及回转装置,且所述铺丝机器人的数量为两个,相对设置在所述回转装置的两侧。
10.根据权利要求9所述的双机器人式自动铺丝系统,其特征在于,所述回转装置包括第二轨道机构、第一回转机构和第二回转机构;
技术总结
本发明提供的一种铺丝机器人及双机器人式自动铺丝系统,涉及铺丝设备技术领域,以在一定程度上解决现有铺丝机较难适应变化趋势较大的较小构件的铺丝制造作业。本发明提供的铺丝机器人包括机械臂、第一轨道机构、承载机构以及铺丝头;第一轨道机构沿第一方向延伸,承载机构设置于第一轨道机构上,且能够沿第一方向运动;承载机构包括承载台和承载座,承载台沿第二方向延伸,且与第一轨道机构相连接,承载座设置于承载台上,机械臂的一端与承载座转动连接,机械臂的另一端与铺丝头相连接,承载座能够相对承载台沿第二方向运动,以带动机械臂运动。
技术研发人员:祝建彬,周雄伟,赵树滨,陈子达
受保护的技术使用者:杭州艾美依航空制造装备有限公司
技术研发日:
技术公布日:2024/5/16
- 还没有人留言评论。精彩留言会获得点赞!