一种基于人体运动状态的智能空调控制方法与流程
本发明属于智能家电,特别是涉及一种基于人体运动状态的智能空调控制方法。
背景技术:
1、随着传感器生产工艺的不断提高,传感器日益小型化、集成化,其中毫米波雷达凭借其全天候、低延时、高精度和长距离等特性,逐渐从军工向汽车、家电、医疗等热门领域渗透。近年来,各大家电生产厂家在其旗舰空调机型上搭载“风随人动”功能,所谓“风随人动”指的是空调根据用户所处实际位置自动调节送风方向和送风强度,该技术实现的关键在于对环境内人体运动状态感知的准确度,传统方法是采用红外探头来获取人体运动状态,但受制于其自身工作特性,检测精度易受环境温度影响。基于上述原因,部分厂开始尝试用毫米波雷达作为红外探头的替代解决方案,解决了温度敏感与隐私问题,但针对静止目标难以进行有效检测,限制了“风随人动”的效果。
2、为解决上述问题,现提供一种基于人体运动状态的智能空调控制方法,根据毫米波雷达在预设采样区域内的检测结果,建立人体运动轨迹并对其进行维护,从而获取区域内用户的运动状态,为调节空调送风策略提供数据支撑。
技术实现思路
1、本发明的目的在于提供一种基于人体运动状态的智能空调控制方法,通过构建人体运动轨迹,将离散的雷达检测数据关联起来,解决了传统的毫米波雷达难以有效检测静止目标,这对于调节空调送风策略的准确性有着显著影响问题。
2、为解决上述技术问题,本发明是通过以下技术方案实现的:
3、本发明为一种基于人体运动状态的智能空调控制方法,包括如下步骤:
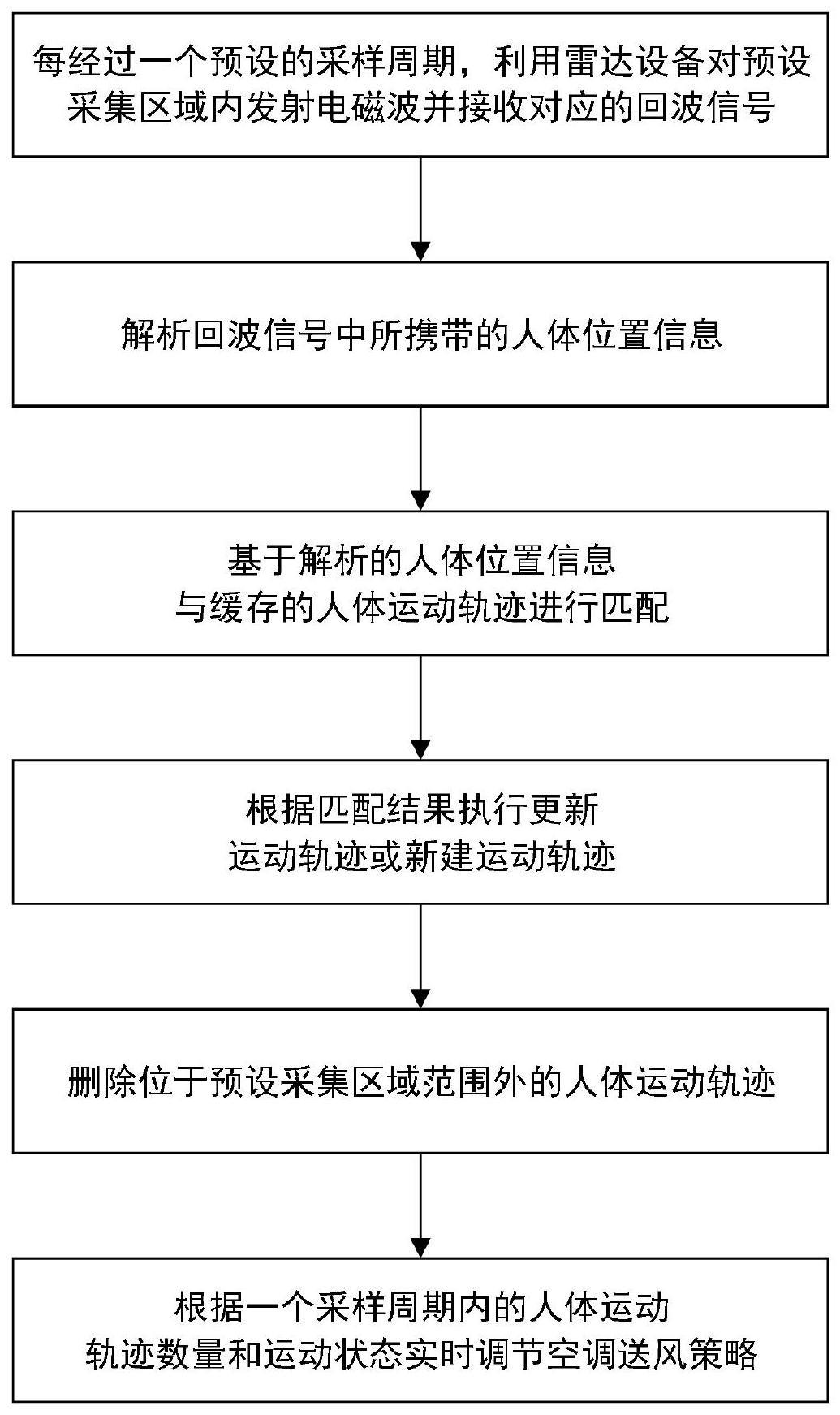
4、步骤s1:每经过一个预设的采样周期,利用雷达设备对预设采集区域内发射电磁波并接收对应的回波信号;
5、步骤s2:解析回波信号中所携带的人体位置信息;
6、步骤s3:基于解析的人体位置信息与缓存的人体运动轨迹进行匹配;
7、步骤s4:根据匹配结果执行更新运动轨迹或新建运动轨迹;
8、步骤s5:删除位于预设采集区域范围外的人体运动轨迹;
9、步骤s6:根据一个采样周期内的人体运动轨迹数量和运动状态实时调节空调送风策略。
10、作为一种优选的技术方案,所述步骤s1中,预设的采样周期为雷达设备的工作周期,即发射一次电磁波到接收对应的回波信号的时间间隔为雷达设备的工作周期。
11、作为一种优选的技术方案,所述雷达设备的工作频段为30~300ghz,波长为1~10mm的毫米波雷达;所述毫米波雷达具体包括:
12、至少一根发射天线,用于对目标区域连续发射调频连续波;
13、至少两根接收天线,用于接收目标区域发射的回波信号;
14、微处理芯片,用于对接收天线获取的回波信号进行解析。
15、作为一种优选的技术方案,所述步骤s1中,预设采集区域为直线距离不超过雷达探测范围的区域,即以雷达所在位置为中线两侧夹角不大于雷达检测视场角的封闭环境。
16、作为一种优选的技术方案,所述步骤s2中,通过接收天线获取目标区域反射的回波信号,并由微处理器的内置算法对回波信号进行解析,具体算法步骤包括:
17、步骤s21:根据di=2cτi,计算第i个目标与雷达设备间的直线距离;
18、步骤s22:根据计算第i个目标与雷达设备间的平面夹角;
19、步骤s23:根据计算第i个目标的运动速度;
20、式中,di表示第i个目标与雷达设备间的直线距离,c表示光速,τi表示第i个目标从发射天线发送电磁波时刻到接收天线收到回波信号时刻二者间的延迟时间,θi表示第i个目标与雷达设备间的平面夹角,λ表示雷达工作波长,δφ表示两个接收天线收到的回波信号相位差,vi表示第i个目标的运动速度,δfd表示雷达的多普勒频移。
21、作为一种优选的技术方案,所述步骤s3中,解析的人体位置信息与缓存的人体运动轨迹进行匹配过程包括:
22、若当前采样周期内获取的人体位置信息为空,结束匹配执行步骤s5;
23、若当前采样周期内缓存的人体运动轨迹为空,结束匹配执行步骤s4;
24、若当前采样周期内获取的人体位置信息与缓存的人体运动轨迹均不为空,则记人体位置信息数量为i,人体运动轨迹数量为j,依次将二者基于最近邻算法进行匹配并记匹配结果为mij,匹配完成后生成只包含0或1的二值矩阵mij;其中,匹配失败记为0,匹配成功记为1。
25、作为一种优选的技术方案,所述步骤s4中,更新运动轨迹或新建运动轨迹的具体过程如下:
26、遍历所述二值矩阵mij中mij的值,当mij=1时,用对应的第i条人体位置信息更新第j条人体运动轨迹中的直线距离、平面夹角和运动速度,并根据更新前后各参数间的差值,判断当前时刻的人体运动状态,并保存在更新后的运动轨迹中;
27、当遍历结束后,若存在未匹配的人体位置信息,根据其直线距离、平面夹角和运动速度,新建标号为k(k=0,1,…,5)的人体运动轨迹。
28、作为一种优选的技术方案,所述步骤s5中,删除位于预设采集区域范围外的人体运动轨迹具体过程如下:遍历当前采样周期内存在的所有人体运动轨迹,判断是否有轨迹的距离、角度超过所述预设采集区域范围;若有,则清空对应轨迹中的数据与标号。
29、作为一种优选的技术方案,所述步骤s6中,具体的空调送风策略包括:
30、统计当前采样周期内的人体运动轨迹总数n,同时设置时间参数t=0并向上计数;
31、若下一个采样周期内n=0则t+1,若下一个采样周期内k≠0则t=0。当t超过预设的阈值t,关闭空调;
32、若一个采样周期内的人体运动轨迹数量n=1,根据运动轨迹中的直线距离、平面夹角以及运动状态调整空调的摆叶方向和送风强度;
33、若一个采样周期内的人体运动轨迹数量n≥2,筛选运动轨迹中直线距离最近和最远的两个目标作为送风对象,调整下摆叶方向对所述预设采集区域内最近目标投送柔风,调整上摆叶方向对所述预设采集区域内最远目标投送强风。
34、本发明具有以下有益效果:
35、本发明通过构建人体运动轨迹,将离散的雷达检测数据关联起来,不仅实现了对场景内静止目标的监测,还能对用户的运动状态进行有效判断,为实现“风随人动”、“远投近柔”等特色空调控制功能提供了有力的数据支撑,解决了传统的毫米波雷达难以有效检测静止目标,使调节空调送风策略的准确性有着显著影响。
36、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于人体运动状态的智能空调控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述步骤s1中,预设的采样周期为雷达设备的工作周期,即发射一次电磁波到接收对应的回波信号的时间间隔为雷达设备的工作周期。
3.根据权利要求2所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述雷达设备的工作频段为30~300ghz,波长为1~10mm的毫米波雷达;所述毫米波雷达具体包括:
4.根据权利要求1所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述步骤s1中,预设采集区域为直线距离不超过雷达探测范围的区域,即以雷达所在位置为中线两侧夹角不大于雷达检测视场角的封闭环境。
5.根据权利要求1所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述步骤s2中,通过接收天线获取目标区域反射的回波信号,并由微处理器的内置算法对回波信号进行解析,具体算法步骤包括:
6.根据权利要求1所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述步骤s3中,解析的人体位置信息与缓存的人体运动轨迹进行匹配过程包括:
7.根据权利要求1所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述步骤s4中,更新运动轨迹或新建运动轨迹的具体过程如下:
8.根据权利要求1所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述步骤s5中,删除位于预设采集区域范围外的人体运动轨迹具体过程如下:遍历当前采样周期内存在的所有人体运动轨迹,判断是否有轨迹的距离、角度超过所述预设采集区域范围;若有,则清空对应轨迹中的数据与标号。
9.根据权利要求1所述的一种基于人体运动状态的智能空调控制方法,其特征在于,所述步骤s6中,具体的空调送风策略包括:
技术总结
本发明公开了一种基于人体运动状态的智能空调控制方法,涉及智能家电技术领域。本发明包括如下步骤:步骤S1:每经过一个预设的采样周期,利用雷达设备对预设采集区域内发射电磁波并接收对应的回波信号;步骤S2:解析回波信号中所携带的人体位置信息;步骤S3:基于解析的人体位置信息与缓存的人体运动轨迹进行匹配;步骤S4:根据匹配结果执行更新运动轨迹或新建运动轨迹;步骤S5:删除位于预设采集区域范围外的人体运动轨迹;步骤S6:根据一个采样周期内的人体运动轨迹数量和运动状态实时调节空调送风策略。本发明通过构建人体运动轨迹,将离散的雷达检测数据关联起来,不仅实现了对场景内静止目标的监测,还能对用户的运动状态进行有效判断。
技术研发人员:杜焜,陈峰峰,任飞,曹代华
受保护的技术使用者:四川虹美智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!