一种灶具无级调火的控制方法及其灶具与流程
本发明涉及灶具,尤其涉及一种灶具无级调火的控制方法及其灶具。
背景技术:
1、现有燃气灶调火功能及算法一般采取固定单一挡位传感器模块及固定控制算法,结构简单,但是档位脱节明显,火力变化波动较大,人机交互火力调节反应突兀,产品可靠性低,影响用户使用体验。
技术实现思路
1、本发明旨在至少在一定程度上解决现有相关技术中存在的问题之一,为此,本发明提出一种灶具无级调火的控制方法,自适应调整伺服电机的旋转位置,实现自适应巡航无级调火功能,提高灶具无级调火的可靠性。本发明还提供了一种灶具。
2、根据上述提供的一种灶具无级调火的控制方法,其通过如下技术方案来实现:
3、一种灶具无级调火的控制方法,包括如下步骤:
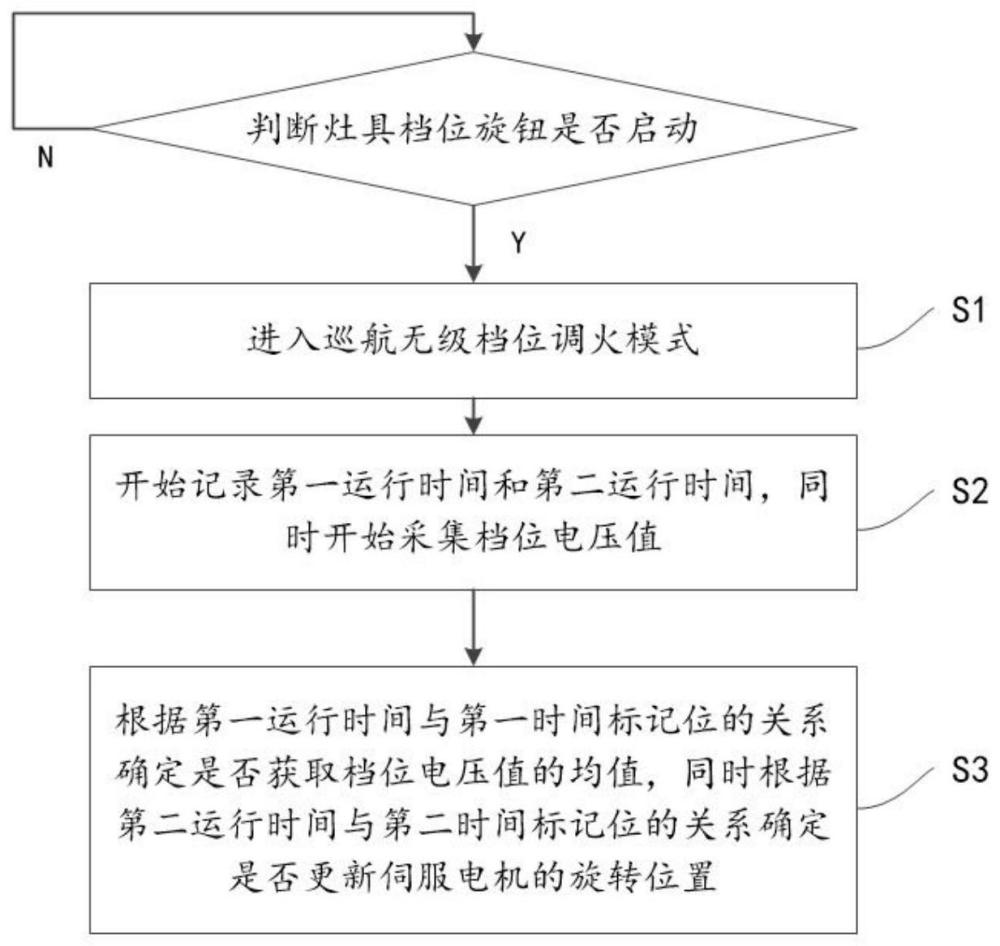
4、s1,进入巡航无级档位调火模式;
5、s2,开始记录第一运行时间和第二运行时间,同时开始采集档位电压值;
6、s3,根据第一运行时间与第一时间标记位的关系确定是否获取档位电压值的均值同时根据第二运行时间与第二时间标记位的关系确定是否更新伺服电机的旋转位置si,其中,所述第二时间标记位大于所述第一时间标记位。
7、在一些实施方式中,所述旋转位置si通过如下公式计算想得到:其中,k1为系数。
8、在一些实施方式中,所述k1通过如下公式计算得到:k1=s/u,其中,s为伺服电机的最大旋转位置,u为360°旋转过程中无级档位的最大电压值。
9、在一些实施方式中,所述第一时间标记位为5~20ms,所述第二时间标记位为80~120ms。
10、在一些实施方式中,所述根据第一运行时间与第一时间标记位的关系确定是否获取档位电压值的均值的具体步骤包括:
11、s311,判断第一运行时间是否达到第一时间标记位;
12、s312,如果第一运行时间未达到第一时间标记位,则每间隔第一设定时间记录当前档位电压值ui,并返回步骤s311;
13、s313,如果第一运行时间达到第一时间标记位,则计算第一运行时间内记录的全部当前档位电压值的均值并将第一运行时间清零后返回步骤s2。
14、在一些实施方式中,在记录当前档位电压值ui后,将当前累计记录的全部当前档位电压值ui赋值于u0,以使u0=∑ui。
15、在一些实施方式中,所述根据第二运行时间与第二时间标记位的关系确定是否更新伺服电机的旋转位置si的具体步骤包括:
16、s321,判断第二运行时间是否达到第二时间标记位;
17、s322,如果第二运行时间未达到第二时间标记位,则每间隔第二设定时间更新伺服电机的旋转位置si,并返回步骤s321。
18、在一些实施方式中,所述根据第二运行时间与第二时间标记位的关系确定是否更新伺服电机的旋转位置si的具体步骤还包括:
19、s323,如果第二运行时间达到第二时间标记位,则将第二运行时间清零后返回步骤s2。
20、根据上述提供的一种灶具,其通过如下技术方案来实现:
21、一种灶具,其应用如上所述的一种灶具无级调火的控制方法,所述灶具包括:无级档位模块;驱动模块,连接所述无级档位模块,用于驱动所述无级档位模块的阀芯转动;档位检测模块,用于实时检测所述无级档位模块的实时档位电压值;主控模块,分别连接所述无级档位模块、所述驱动模块和所述档位检测模块。
22、在一些实施方式中,所述灶具还包括整流模块,所述主控模块通过所述整流模块接电。
23、与现有技术相比,本发明的至少包括以下有益效果:
24、本发明的一种灶具无级调火的控制方法,在巡航无级档位调火模式中,通过根据第一运行时间与第一时间标记位的关系确定是否获取档位电压值的均值同时根据第二运行时间与第二时间标记位的关系确定是否更新伺服电机的旋转位置si,实现自适应动态巡航检测灶具的无极挡位模块信号,并且动态调节伺服电机的导通位置,从而实现灶具自适应巡航无级调火功能,提高灶具无级调火的可靠性。
技术特征:
1.一种灶具无级调火的控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种灶具无级调火的控制方法,其特征在于,所述旋转位置si通过如下公式计算想得到:其中,k1为系数。
3.根据权利要求2所述的一种灶具无级调火的控制方法,其特征在于,所述k1通过如下公式计算得到:k1=s/u,其中,s为伺服电机的最大旋转位置,u为360°旋转过程中无级档位的最大电压值。
4.根据权利要求1所述的一种灶具无级调火的控制方法,其特征在于,所述第一时间标记位为5~20ms,所述第二时间标记位为80~120ms。
5.根据权利要求1-4任一项所述的一种灶具无级调火的控制方法,其特征在于,所述根据第一运行时间与第一时间标记位的关系确定是否获取档位电压值的均值的具体步骤包括:
6.根据权利要求5所述的一种灶具无级调火的控制方法,其特征在于,在记录当前档位电压值ui后,将当前累计记录的全部当前档位电压值ui赋值于u0,以使u0=∑ui。
7.根据权利要求1-4任一项所述的一种灶具无级调火的控制方法,其特征在于,所述根据第二运行时间与第二时间标记位的关系确定是否更新伺服电机的旋转位置si的具体步骤包括:
8.根据权利要求1所述的一种灶具无级调火的控制方法,其特征在于,所述根据第二运行时间与第二时间标记位的关系确定是否更新伺服电机的旋转位置si的具体步骤还包括:
9.一种灶具,其特征在于,其应用如权利要求1-8任一项所述的一种灶具无级调火的控制方法,所述灶具包括:
10.根据权利要求9所述的一种灶具,其特征在于,所述灶具还包括整流模块,所述主控模块通过所述整流模块接电。
技术总结
本发明公开了一种灶具无级调火的控制方法,包括如下步骤:S1,进入巡航无级档位调火模式;S2,开始记录第一运行时间和第二运行时间,同时开始采集档位电压值;S3,根据第一运行时间与第一时间标记位的关系确定是否获取档位电压值的均值同时根据第二运行时间与第二时间标记位的关系确定是否更新伺服电机的旋转位置S<subgt;i</subgt;,其中,所述第二时间标记位大于所述第一时间标记位。本发明可自适应调整伺服电机的旋转位置,实现自适应巡航无级调火功能,提高灶具无级调火的可靠性。
技术研发人员:李耀聪,潘叶江
受保护的技术使用者:华帝股份有限公司
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!