一种激光清洗装备清洗过程低碳建模与工艺参数优化方法
1.本发明涉及一种激光清洗装备清洗过程低碳建模与工艺参数优 化方法,属于先进制造与自动化技术领域。
背景技术:
2.激光清洗作为一种新型高效清洗技术被广泛应用于航空航天、高 铁、船舶等制造业领域。其利用激光器产生的高强度、高能量光束, 使污染物瞬时吸收大量的热量从而脱离基材表面,在此过程中,由于 热量的不完全吸收及电能的不完全转化导致大量碳排放产生。合理的 工艺参数组合是降低激光清洗过程碳排放、保证污染物清洗质量及基 材表面无损的基础和前提。因此,探究激光清洗过程碳排放构成,研 究其低碳建模与工艺参数优化方法对我国激光清洗装备产业实现绿 色高质量发展具有重要意义。
技术实现要素:
3.本发明针对激光清洗过程碳排放源的复杂性所导致的碳排放评 估及保证清洗质量难等问题,首先,建立激光清洗工艺过程碳排放模 型,搭建激光清洗过程碳排放实时监测平台;应用回归拟合与激光清 洗试验,获取碳排放模型参数;以碳排放为目标,综合考虑粗糙度、 含碳、氧量等质量目标,建立激光清洗多目标工艺参数优化模型,提 出基于协同进化框架多目标进化算法的激光清洗工艺参数优化模型 求解算法,获得最佳激光清洗工艺参数。最后,通过实例分析验证模 型的有效性与准确性。
4.本发明的一种激光清洗装备清洗过程低碳建模与工艺参数优化 方法包括如下步骤:
5.s1:建立激光清洗工艺过程碳排放模型,搭建激光清洗过程碳排 放实时监测平台;
6.s2:应用回归拟合与激光清洗试验,获取碳排放模型参数;
7.s3:以碳排放为目标,综合考虑粗糙度、含碳、氧量等质量目标, 建立激光清洗多目标工艺参数优化模型;
8.s4:提出基于协同进化框架多目标进化算法的激光清洗工艺参数 优化模型求解算法;
9.s5:实例分析。
10.根据本发明:步骤s1包括如下子步骤:
11.s11:构建激光清洗过程时间模型t=t
p
+tw+tc,
12.式中,t为激光清洗总时间;t
p
为激光清洗前准备时间;tw为激 光清洗各系统待机时间;tc为激光清洗各子系统工作时间;
13.s12:水冷子系统为单独工作系统,工作时间与其他子系统工作 时间不同,水冷子系统工作时间为
14.式中,t
cw
为水冷子系统工作时间;p
in
为激光输入功率;p
out
为激 光输出功率;vf为冷却水流速;ρ为冷却水密度;δt为冷却水温差; c为冷却水比热容;
15.s13:构建激光器子系统碳排放模型c
l
=(p
l
×
tw+n
×f×
tc)
×
fe,
16.式中,c
l
为激光器子系统碳排放;p
l
为激光器子系统待机功率; n为单脉冲能量;f为脉冲频率,n
×
f为激光器工作功率;fe为电能 碳排放因子;
17.s14:构建机器人子系统碳排放模型c
t
=(p
t
×
tw+ps×
tc)
×
fe,
18.式中,c
t
为机器人子系统碳排放;p
t
为机器人子系统待机状态功 率;ps为机器人子系统工作功率;
19.s15:构建除尘子系统碳排放模型cd=pd×
tc×
fe,
20.式中,cd为除尘子系统碳排放;pd为除尘子系统工作功率;
21.s16:水冷子系统为独立工作的系统,因此,水冷子系统碳排放 模型为c
cw
=[p
cw
×
t
cw
+pc×
(t-t
cw
)]
×
fe,
[0022]
式中,c
cw
为水冷子系统碳排放;p
cw
为水冷子系统工作功率;t
cw
为水冷子系统工作时间;pc为水冷子系统待机功率;t为激光清洗设 备总时间;
[0023]
s17:构建辅助子系统碳排放模型ci=pi×
t
×
fe,
[0024]
式中,ci为辅助子系统碳排放;pi为辅助子系统工作功率;
[0025]
s18:构建激光清洗过程物耗碳排放模型cm=(m
a-mb)
×fm
,
[0026]
式中,cm为物耗碳排放;ma为清洗前基材质量;mb为清洗后基 材质量;fm为物料碳排放因子;
[0027]
s19:综上所述,整理得到激光清洗过程总碳排放模型如下:
[0028][0029]
s20:搭建激光清洗过程碳排放实时监测平台。
[0030]
根据本发明:步骤s2包括如下子步骤:
[0031]
s21:应用回归拟合与激光清洗实验,得到激光器输入与输出功 率间的函数关系式p
in
=2.846p
out
+605.5;
[0032]
s22:应用回归拟合与激光清洗实验,得到机器人系统功率与行 进速度间的函数关系式ps=1.323vs+662;
[0033]
s23:获取水冷子系统功率参数值;
[0034]
s24:获取除尘子系统功率参数值;
[0035]
s25:获取辅助子系统功率参数值。
[0036]
根据本发明:步骤s3包括如下子步骤:
[0037]
s31:基于design expert(设计专家)软件,将数据拟合,构建 粗糙度函数:
[0038][0039]
式中,ra为粗糙度;p
out
为激光功率;vs为行进速度;v
p
为清洗 速度;
[0040]
s32:基于design expert软件,将数据拟合,构建元素占比函数:
[0041][0042]
s33:建立多目标优化模型函数
[0043]
f(p
out
,vs,v
p
)=min{ce},{ra},{ω}
[0044][0045]
式中,p
minout
为激光器输出最小功率;p
maxout
为激光器输出最大功 率;v
mins
为激光器最小行进速度;v
maxs
为激光器最大行进速度;v
minp
为机器人最小清洗速度;v
maxp
为机器人最大清洗速度。
[0046]
根据本发明:步骤s4包括如下子步骤:
[0047]
s41:基于协同进化框架进化多目标复杂约束优化算法的多目标 优化模型求解;
[0048]
s42:基于改进gra(灰色关联分析法)和topsis(优劣解距 离法)分析选取最优解。
[0049]
本发明的有益效果是:本发明在明确激光清洗碳排放机理基础上 建立激光清洗碳排放模型,为激光清洗领域碳追踪提供新方法,为企 业的节能减排与提高效益提供理论指导。通过优化激光清洗工艺参 数,降低激光清洗过程碳排放量,减少温室气体排放,提高清洗质量, 降低清洗成本,从而实现激光清洗过程低碳、高质量、低成本目标, 为以后学者研究激光清洗工艺碳排放积累宝贵经验。
附图说明
[0050]
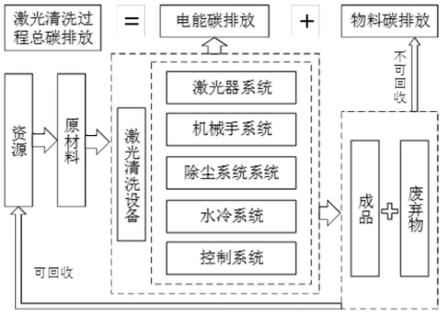
图1为激光清洗过程碳排放边界图。
[0051]
图2为激光清洗过程碳排放监测平台。
[0052]
图3为激光清洗过程功率曲线变化图。
[0053]
图4为工作时间89s水冷子系统功率变化图。
[0054]
图5为工作时间96s水冷子系统功率变化图。
[0055]
图6为工作时间100s水冷子系统功率变化图。
[0056]
图7为工作时间110s水冷子系统功率变化图。
[0057]
图8为机器人子系统功率变化图。
[0058]
图9为协同进化框架的多目标进化算法流程图。
[0059]
图10(a)和10(b)为清洗后效果对比图,其中图10(a)为清 洗前效果,图10(b)为清洗后效果。
[0060]
图11(a)-11(c)为优化结果对比图,其中图11(a)为碳排放 优化结果对比图;图11(b)为粗糙度优化结果对比图;图11(c) 为元素占比优化结果对比图。
具体实施方式
[0061]
下面结合附图及实施例,对本发明进行进一步详细说明,但应当 理解实施例用以解释本发明,并不用于限制本发明。
[0062]
本发明开发一种激光清洗装备清洗过程低碳建模与工艺参数优 化方法。图1为激光清洗过程碳排放边界图。图2为激光清洗过程碳 排放监测平台。图3为激光清洗过程功率曲线变化图。图4为工作时 间89s水冷子系统功率变化图。图5为工作时间96s水冷子系统功率 变化图。图6为工作时间100s水冷子系统功率变化图。图7为工作 时间110s水冷子系统功率变化图。图8为机器人子系统功率变化图。 图9为协同进化框架的多目标进化算法流程图。图10(a)和10(b) 为清洗后效果对比图。图11(a)为碳排放优化结果对比图。图11(b) 为粗糙度优化结果对比图。图11(c)为元素占比优化结果对比图。 如图1-11(c)所示,示出了本发明的一种激光清洗装备清洗过程低 碳建模与工艺参数优化方法中的激光清洗过程功率曲线变化、激光清 洗过程碳排放边界、激光清洗过程碳排放监测平台、不同工作时间下 水冷子系统功率变化、机器人子系统功率变化、协同进化框架的多目 标进化算法流程图、清洗后效果及优化结果对比图。
[0063]
本发明的整体技术方案为一种激光清洗装备清洗过程低碳建模 与工艺参数优化方法,包括如下步骤:
[0064]
s1:建立激光清洗工艺过程碳排放模型,搭建激光清洗过程碳排 放实时监测平台;
[0065]
s2:应用回归拟合与激光清洗试验,获取碳排放模型参数;
[0066]
s3:以碳排放为目标,综合考虑粗糙度、含碳、氧量等质量目标, 建立激光清洗多目标工艺参数优化模型;
[0067]
s4:提出基于协同进化框架多目标进化算法的激光清洗工艺参数 优化模型求解算法;
[0068]
s5:实例分析。
[0069]
所述的步骤s1包括如下子步骤:
[0070]
s11:构建激光清洗过程时间模型t=t
p
+tw+tc,
[0071]
式中,t为激光清洗总时间;t
p
为激光清洗前准备时间;tw为激 光清洗各系统待机时间;tc为激光清洗各子系统工作时间;
[0072]
s12:水冷子系统为单独工作系统,工作时间与其他子系统工作 时间不同,水冷子系统工作时间为
[0073]
式中,t
cw
为水冷子系统工作时间;p
in
为激光输入功率;p
out
为激 光输出功率;vf为冷却水流速;ρ为冷却水密度;δt为冷却水温差; c为冷却水比热容;
[0074]
s13:构建激光器子系统碳排放模型c
l
=(p
l
×
tw+n
×f×
tc)
×
fe,
[0075]
式中,c
l
为激光器子系统碳排放;p
l
为激光器子系统待机功率; n为单脉冲能量;f为脉冲频率,n
×
f为激光器工作功率;fe为电能 碳排放因子;
[0076]
s14:由图8机器人子系统碳排放模型c
t
=(p
t
×
tw+ps×
tc)
×
fe,
[0077]
式中,c
t
为机器人子系统碳排放;p
t
为机器人子系统待机状态功 率;ps为机器人子系统工作功率;
[0078]
s15:构建除尘子系统碳排放模型cd=pd×
tc×
fe,
[0079]
式中,cd为除尘子系统碳排放;pd为除尘子系统工作功率;
[0080]
s16:由图4、5、6、7构建独立工作的水冷子子系统,因此,水 冷子系统碳排放模型为c
cw
=[p
cw
×
t
cw
+pc×
(t-t
cw
)]
×
fe,
[0081]
式中,c
cw
为水冷子系统碳排放;p
cw
为水冷子系统工作功率;t
cw
为水冷子系统工作时间;pc为水冷子系统待机功率;t为激光清洗设 备总时间;
[0082]
s17:构建辅助子系统碳排放模型ci=pi×
t
×
fe,
[0083]
式中,ci为辅助子系统碳排放;pi为辅助子系统工作功率;
[0084]
s18:构建激光清洗过程物耗碳排放模型cm=(m
a-mb)
×fm
,
[0085]
式中,cm为物耗碳排放;ma为清洗前基材质量;mb为清洗后 基材质量;fm为物料碳排放因子;
[0086]
s19:综上所述,整理得到激光清洗过程总碳排放模型如下:
[0087]
s20:搭建激光清洗过程碳排放实时监测平台如图2。
[0088]
所述的步骤s2包括如下子步骤:
[0089]
s21:应用回归拟合与激光清洗实验,将表1数据得到激光器输 入与输出功率间的函数关系式p
in
=2.846p
out
+605.5;
[0090]
表1激光器子系统工作状态功率变化
[0091][0092]
s22:应用回归拟合与激光清洗实验,由表2数据得到机器人系 统功率与行进速度间的函数关系式ps=1.323vs+662;
[0093]
表2机器人系统功率变化表
[0094]
[0095]
s23:获取水冷子系统功率参数值;
[0096]
s24:获取除尘子系统功率参数值;
[0097]
s25:获取辅助子系统功率参数值。
[0098]
s26:基于表3、表4、表5、表6,构建激光清洗过程碳排放数 学模型:
[0099][0100]
表3各地区电能碳排放因子表
[0101][0102]
表4物料碳排放因子
[0103][0104]
表5功率参数表
[0105][0106]
表6其他参数表
[0107][0108]
所述的步骤s3包括如下子步骤:
[0109]
s31:基于design expert软件,由表7将数据拟合,构建粗糙度 函数:
[0110][0111]
式中,ra为粗糙度;p
out
为激光功率;vs为行进速度;v
p
为清洗 速度;
[0112]
s32:基于design expert软件,由表7将数据拟合,构建元素占 比函数:
[0113][0114]
表7粗糙度及元素含量测量值
[0115][0116]
s33:建立多目标优化模型函数
[0117]
f(p
out
,vs,v
p
)=min{ce},{ra},{ω}
[0118][0119]
式中,p
minout
为激光器输出最小功率500w;p
maxout
为激光器输出 最大功率1000w;v
minp
为激光器最小清洗速度1000mm/s;v
maxp
为激 光器最大清洗速度4000mm/s;v
mins
为机器人最小行进速度1mm/s; v
maxs
为机器人最大行进速度10mm/s。
[0120]
所述的步骤s4包括如下子步骤:
[0121]
s41:基于协同进化框架进化多目标复杂约束优化算法的多目标 优化模型求解流程图如图9;
[0122]
s42:基于改进gra和topsis分析选取最优解如表8。
[0123]
表8改进gra与topsis分析选取最优解
[0124][0125]
所述的步骤s5包括如下子步骤:
[0126]
采用300*300mm2a12铝合金对所得优化结果进行实验验证,由 表8优化后的工艺参数进行验证实验,得到优化前后对比结果如表9 所示。
[0127]
表9工艺参数优化对比表
[0128][0129]
以上所述为本发明的优选实施例,并不用于限制本发明,本发明 所属领域的技术人员依然可以对上述技术方案进行修改,或者对其中 部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的 任何修改、等同替换、改进等,均应包括在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1