一种自主巡航的圆筒内灰尘智能清理爬行器的制作方法
本技术涉及单晶硅生产设备领域,具体涉及一种自主巡航的圆筒内灰尘智能清理爬行器。
背景技术:
1、单晶硅的生产方法以直拉法和区熔法为主,世界单晶硅产量,其中70~ 80%是直拉法生产,20~30%是区熔和其他方法生产的。直拉法;该法的简单描述为:原料装在一个坩埚中,坩埚上方有一可旋转和升降的籽晶杆,杆的下端有一夹头,其上捆上一根籽晶。原料被加热器熔化后,将籽晶插入熔体之中,控制合适的温度,边转动提拉,即可获得所需单晶。
2、使用直拉法制取单晶硅需要用到直拉单晶炉,其主要构成部件有提拉头、副室、炉盖、炉筒、下炉筒、底座机架、坩埚下传动装置、分水器以及水路布置、氩气管道布置、真空泵以及真空除尘装置和电源以及电控柜。
3、直拉法生产单晶硅相比于其他方法,具有可以方便地观察晶体生长过程;自由表面处生长,而与坩埚接触,可以减少热应力;可以方便地使用定向籽品和籽晶细颈,以减小晶体重点缺陷,得到所需取向的晶体等优点。
4、但是在应用直拉法制取单晶硅的生产过程中,化料坩埚熔料时会挥发出硅气及里面的微量杂质,这部分挥发会沾附到生产设备上,为保证单晶硅的纯度,拉晶车间每隔二十天左右便要停工,对全部生产设备进行清理保养。
5、其中,生产车间中的炉筒底部开口距离地面三米左右,因此炉筒的清理及其麻烦。目前主要靠人工进行清理,工人手举长杆将拖把插入烟筒内,需要时刻仰着头,不但费事费力清理效率慢,还存在一定的安全风险。
技术实现思路
1、本实用新型提供了一种自主巡航的圆筒内灰尘智能清理爬行器,其目的在于解决现有技术清理效率慢费时费力的问题。
2、为实现上述目的,本实用新型的技术方案为:
3、本实用新型提供了一种自主巡航的圆筒内灰尘智能清理爬行器,包括圆筒框架、至少两个举升气缸、至少两个底部涨紧气缸、至少两个顶部涨紧气缸、举升平台、毛刷安装平台板、清洗圆盘、用于提供高压气源的储气瓶和控制清理爬行器整套设备运转的爬行器控制终端。
4、所述举升气缸设置在所述圆筒框架内且其活塞杆从顶部伸出,所述举升平台设置在所述举升气缸的活塞杆端部,所述举升平台可在所述举升气缸的推动下上下移动;所述底部涨紧气缸设置在所述圆筒框架的底部,所述顶部涨紧气缸设置在所述举升平台的上表面。所述底部涨紧气缸的活塞杆端部及所述顶部涨紧气缸的活塞杆端部均与弧形支撑座连接,所述弧形支撑座外表面均匀设置有若干摩擦固定块;所述圆筒框架中部设置有抽吸口。
5、所述毛刷安装平台板设置在所述举升平台上表面,所述毛刷安装平台板为环形板,所述毛刷安装平台板边缘设置有电机安装孔;所述毛刷安装平台板下表面设置有电机,所述电机的输出轴穿过所述电机安装孔,所述电机的输出轴端部设置有主动齿轮,所述清洗圆盘通过旋转支撑结构可转动的设置在所述毛刷安装平台板上表面,所述清洗圆盘设置有清洗毡圈,所述清洗圆盘在所述电机的驱动下转动。
6、进一步,所述圆筒框架包括环形顶板、环形底板和设置在所述环形顶板与所述环形底板之间的至少两个弧形立板,所述弧形立板均分圆周设置,所述弧形立板的数量与所述举升气缸的数量相同。
7、进一步,所述抽吸口与吸尘器或车间吸尘管道相连。
8、进一步,所述毛刷安装平台板通过至少三个立柱设置在所述举升平台上表面。
9、进一步,所述旋转支撑结构包括环形齿轮和至少三个支撑轴承。
10、进一步,所述环形齿轮与所述主动齿轮啮合,所述环形齿轮内环设置有环形限位凹槽,所述支撑轴承的外圈嵌入所述环形限位凹槽并可自由滑动。
11、进一步,所述环形底板下表面设置有下行程开关,所述毛刷安装平台板上表面设置有上行程开关。
12、进一步,所述爬行器控制终端包括控制芯片,以及与所述控制芯片相连的若干继电器、若干电磁阀和若干控制按钮。
13、本实用新型所达到的有益效果为:
14、本实用新型使用机械替代人工,大大提高了清理效率,将工人从繁琐的体力劳动中解放了出来,减少了直拉单晶炉的维护时间。
技术特征:
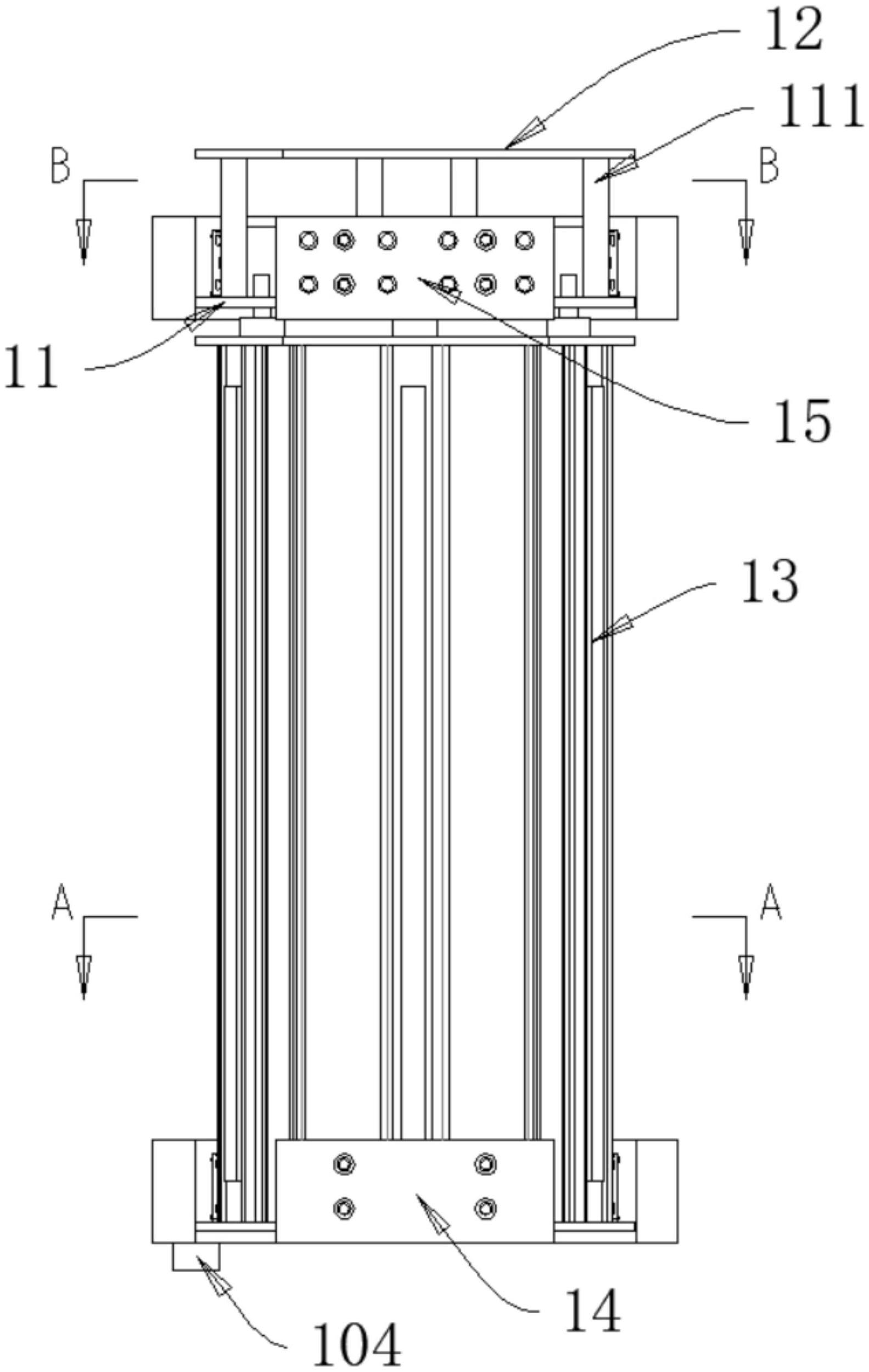
1.一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:包括圆筒框架(1)、至少两个举升气缸(13)、至少两个底部涨紧气缸(14)、至少两个顶部涨紧气缸(15)、举升平台(11)、毛刷安装平台板(12)、清洗圆盘(18)、用于提供高压气源的储气瓶和控制清理爬行器整套设备运转的爬行器控制终端;
2.根据权利要求1所述的一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:所述圆筒框架(1)包括环形顶板(101)、环形底板(102)和设置在所述环形顶板(101)与所述环形底板(102)之间的至少两个弧形立板(103),所述弧形立板(103)均分圆周设置,所述弧形立板(103)的数量与所述举升气缸(13)的数量相同。
3.根据权利要求1所述的一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:所述抽吸口与吸尘器或车间吸尘管道相连。
4.根据权利要求1所述的一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:所述毛刷安装平台板(12)通过至少三个立柱(111)设置在所述举升平台(11)上表面。
5.根据权利要求1所述的一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:所述旋转支撑结构(19)包括环形齿轮(191)和至少三个支撑轴承(192)。
6.根据权利要求5所述的一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:所述环形齿轮(191)与所述主动齿轮(171)啮合,所述环形齿轮(191)内环设置有环形限位凹槽,所述支撑轴承(192)的外圈嵌入所述环形限位凹槽并可自由滑动。
7.根据权利要求2所述的一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:所述环形底板(102)下表面设置有下行程开关(104),所述毛刷安装平台板(12)上表面设置有上行程开关(121)。
8.根据权利要求1所述的一种自主巡航的圆筒内灰尘智能清理爬行器,其特征在于:所述爬行器控制终端包括控制芯片,以及与所述控制芯片相连的若干继电器、若干电磁阀和若干控制按钮。
技术总结
本技术涉及单晶硅生产设备领域,具体涉及一种自主巡航的圆筒内灰尘智能清理爬行器。包括圆筒框架、至少两个举升气缸、至少两个底部涨紧气缸、至少两个顶部涨紧气缸、举升平台、毛刷安装平台板、清洗圆盘、用于提供高压气源的储气瓶和控制清理爬行器整套设备运转的爬行器控制终端;本技术使用机械替代人工,大大提高了清理效率,将工人从繁琐的体力劳动中解放了出来,减少了直拉单晶炉的维护时间。
技术研发人员:张新波,陈锡鹏,张鹏飞,张佳伟,张鹏伟
受保护的技术使用者:山东益立申节能技术有限公司
技术研发日:20220826
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!