管道清洁机器人
本申请涉及机器人控制,具体地,涉及一种管道清洁机器人。
背景技术:
1、在石油、天然气、核工业、给排水、管道输送等工业应用领域里,管道作为一种重要的运输工具一直发挥着非常重要作用。管道是一种工业中常见的运输工具,如污水排放管道,石油天然气管道,中央空调通风管道等,由于管道所处环境的复杂性和工业需要,这些管道不仅仅是单纯的直管,而是多种形式,例如具有一定斜坡的管道,管径变化的管道,带有圆弧的弯道,t型管道等。在管道使用过程中,管道油污、变形、堵塞、断裂、泄漏等问题一直存在,管道的检测、维修、清洗工作是一项繁杂和困难的工作。
2、在采用传统的人工维护方法中,存在着费用高、危险性高、维护质量低等问题。随着近年来科学技术和新型材料的发展,管道清洁机器人的出现极大的解决了管道维护的难题。管道清洁机器人属于工业机器人中一种特种机器人。一般来说,管道清洁机器人携带各种传感器和作业装备并在操作人员或计算机的控制下在管道内部实现对管道的常规检测和维修保养。它是专门针对输送管道的检测、清理、焊接而研制出来的,通过对管道进行定期和特定的检测维护和清理工作,管道安全可以得到长期的保障。然而,现有的管道清洁机器人在作业过程中,对特殊类型的管道的适用性较差,无法保证清洁效果。
技术实现思路
1、为了克服现有技术中的至少一个不足,本申请实施例提供一种管道清洁机器人。
2、第一方面,提供一种管道清洁机器人,包括:
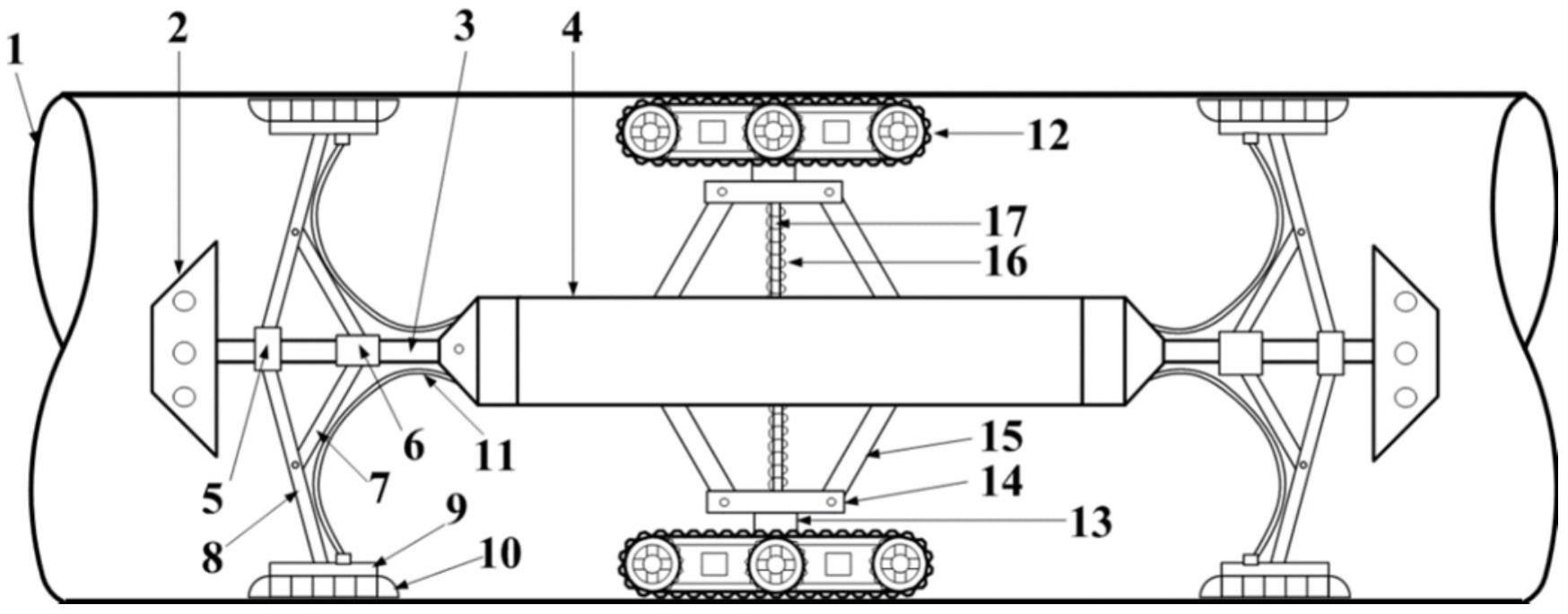
3、伞型清洁机构、履带行走机构、检测及防护机构、支撑箱体,伞型清洁机构和履带行走机构均连接支撑箱体,检测及防护机构连接伞型清洁机构;
4、伞型清洁机构用于对管道进行清洁,包括多个清洁头,多个清洁头通过压力调节机构连接支撑箱体;
5、履带行走机构用于实现管道清洁机器人在管道内的行走和支撑,包括多个履带行进盘,每个履带行进盘通过一个支撑支架连接支撑箱体;
6、检测及防护机构包括盾状机械防护头,用于实现管道清洁机器人的安全防护。
7、在一个实施例中,伞型清洁机构设置有2个,在管道清洁机器人对管道进行清洁的过程中,2个伞型清洁机构位于管道清洁机器人沿管道长度方向的两端。
8、在一个实施例中,检测及防护机构设置有2个,分别连接2个伞型清洁机构。
9、在一个实施例中,压力调节机构包括:支撑杆、多个伞骨、多个伞骨拉伸杆、多个电动驱动盒;
10、支撑杆的一端连接支撑箱体,支撑杆的另一端连接检测及防护机构;
11、支撑杆通过多个伞骨安装多个清洁头,每个清洁头与支撑箱体内的水箱连通,用于清洁管道;每个伞骨的中间位置通过一个伞骨拉伸杆连接支撑杆,多个伞骨在多个伞骨拉伸杆的作用下收拢或者展开;
12、每个清洁头上对应安装一个电动驱动盒,电动驱动盒用于驱动清洁头旋转以清洁管道。
13、在一个实施例中,电动驱动盒上设置有注水孔,注水孔通过供水管连接水箱,水从水箱经由供水管、注水孔、电动驱动盒到达清洁头。
14、在一个实施例中,履带行进盘包括履带驱动盒、转动轴和履带机构,履带驱动盒通过转动轴带动履带机构转动;
15、支撑支架包括底盘连接杆、横向支撑方形杆、两个活动限位杆、竖向可伸缩限位杆,竖向可伸缩限位杆上套装有支撑弹簧,底盘连接杆一端连接履带行进盘,另一端连接横向支撑方形杆,横向支撑方形杆通过两个活动限位杆和竖向可伸缩限位杆上连接支撑箱体,横向支撑方形杆与两个活动限位杆和竖向可伸缩限位杆均活动连接。
16、在一个实施例中,盾状机械防护头上设置有至少一个喷洒头,喷洒头与水箱连通,用于喷洒水雾。
17、相对于现有技术而言,本申请具有以下有益效果:本申请的管道清洁机器人,包括伞型清洁机构、履带行走机构、检测及防护机构、支撑箱体,本申请的伞型清洁机构和履带行走机构与管道内壁之间的距离可调节,从而能够调整清洁直径范围,使其适用于不同大小管径的管道清理工作;管道清洁机器人的结构简单,控制快捷,清洁能力强,具有避障能力,可以适用在不同管径、不同形状的管道。
技术特征:
1.一种管道清洁机器人,其特征在于,包括:
2.如权利要求1所述的管道清洁机器人,其特征在于,
3.如权利要求2所述的管道清洁机器人,其特征在于,所述检测及防护机构设置有2个,分别连接2个所述伞型清洁机构。
4.如权利要求1所述的管道清洁机器人,其特征在于,所述压力调节机构包括:支撑杆(3)、多个伞骨(8)、多个伞骨拉伸杆(7)、多个电动驱动盒(9);
5.如权利要求4所述的管道清洁机器人,其特征在于,所述电动驱动盒(9)上设置有注水孔(20),所述注水孔(20)通过供水管(11)连接所述水箱,水从所述水箱经由所述供水管(11)、所述注水孔(20)、所述电动驱动盒(9)到达所述清洁头(10)。
6.如权利要求1所述的管道清洁机器人,其特征在于,所述履带行进盘包括履带驱动盒(18)、转动轴(21)和履带机构(12),所述履带驱动盒(18)通过所述转动轴(21)带动履带机构(12)转动;
7.如权利要求1所述管道清洁机器人,其特征在于,所述盾状机械防护头(2)上设置有至少一个喷洒头(22),所述喷洒头(22)与水箱连通,用于喷洒水雾。
技术总结
本申请涉及一种管道清洁机器人,包括伞型清洁机构、履带行走机构、检测及防护机构、支撑箱体,本申请的伞型清洁机构和履带行走机构与管道内壁之间的距离可调节,从而能够调整清洁直径范围,使其适用于不同大小管径的管道清理工作;管道清洁机器人的结构简单,控制快捷,清洁能力强,具有避障能力,可以适用在不同管径、不同形状的管道。
技术研发人员:闫梓涵,刘海龙,沙林秀,王洁琳
受保护的技术使用者:西安石油大学
技术研发日:20221212
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!