一种轨道机器人自动清洁装置的制作方法
本技术涉及轨道清洁,具体为一种轨道机器人自动清洁装置。
背景技术:
1、在畜牧养殖业中,一般都是人工定期对棚舍(例如猪舍)进行检查,但是现今的智能化养殖中,运用人工智能手段可以降低人工的劳动强度,且能够实现实时在轨监控;
2、这种实时在轨监控方式的实现需要在棚舍上方架设轨道,轨道机器人在轨道上不间断运行,从而实现实时监控;但是由于养殖的棚舍内难以避免的会出现卫生环境不够清洁的问题,这就会导致轨道机器人的滚轮上会积累灰尘或脏污,由于轨道机器人的安装位置较高,采用人工清理的方式很不方便,也不安全。为此,我们提出一种轨道机器人自动清洁装置以解决上述问题。
技术实现思路
1、本实用新型的目的在于提供了一种轨道机器人自动清洁装置。通过设置浮动刷头,在不工作的情况下自动对储水腔进行密封,合理的对清洁液进行利用,利用自动行走的滚轮将浮动刷头顶起,从而接触密封,形成出水间隙,清洁液进入到橡胶密封垫底部的窄槽中,并顺着刷毛往下流动,进而润湿滚轮,再利用固定刷毛进行清洁,清洁后进行清洗,整个结构简单可靠,全自动完成整个清洗过程,且成本低,不需要额外进行维护,有效的解决了高层轨道难以清理的问题。
2、本实用新型所解决的技术问题为:如何能够自动对轨道机器人的滚轮进行清洁,解决现有技术中需要人工维护导致的不方便和不安全的问题。
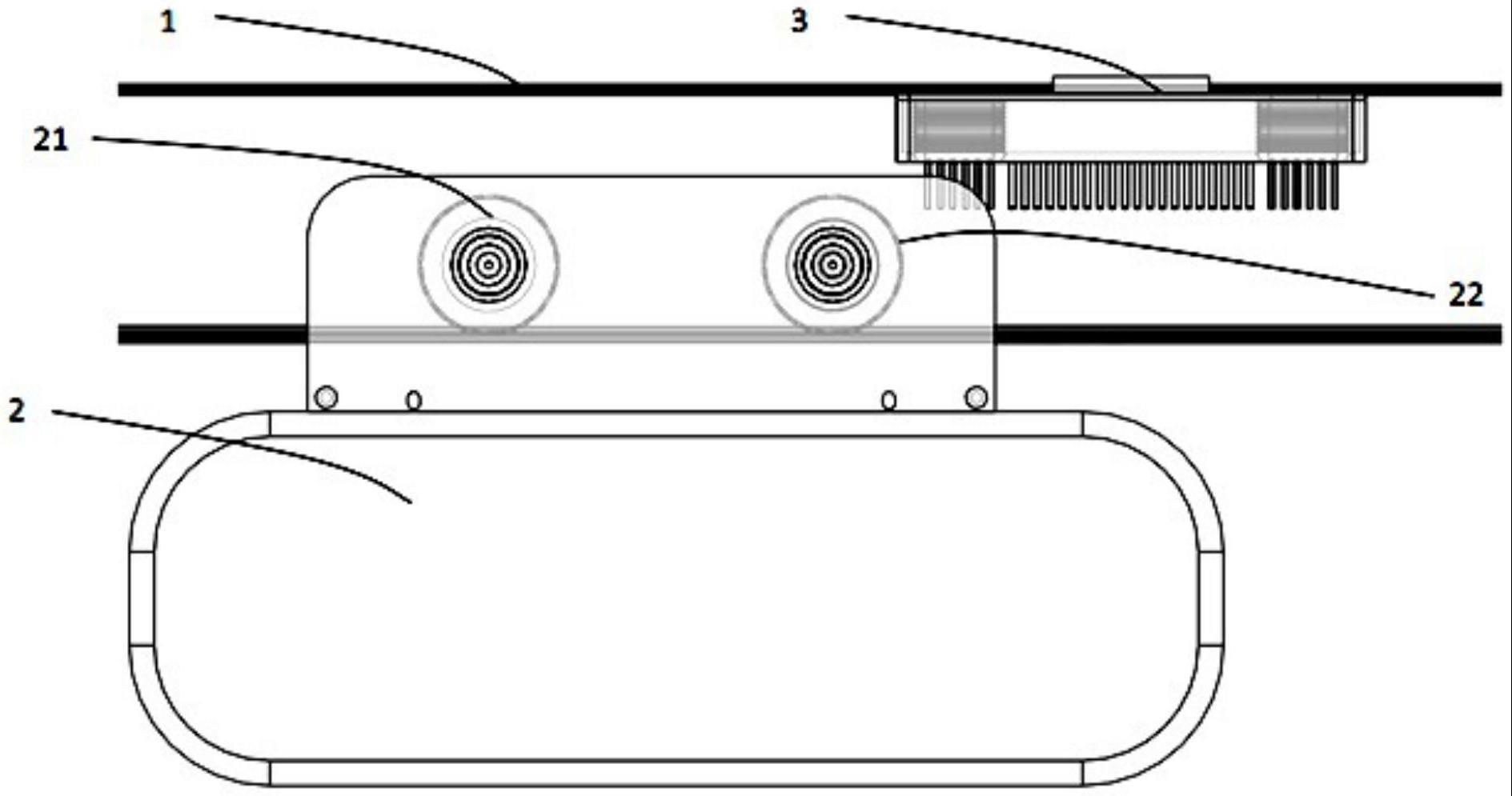
3、本实用新型可以通过以下技术方案实现:一种轨道机器人自动清洁装置,包括轨道和储水盒,储水盒安装在轨道上,储水盒的底部开设有安装槽,所述安装槽内设置有浮动刷,安装槽与储水盒的储水腔连通,所述浮动刷包括弹性件、密封件和刷毛。
4、本实用新型的进一步技术改进在于:弹性件为伸缩橡胶套,所述密封件为橡胶密封垫,所述刷毛为硬质的浮动刷毛。
5、本实用新型的进一步技术改进在于:橡胶密封垫的底部开设有窄槽,浮动刷毛安装在窄槽中,在工作时,清洁液进入到窄槽内并在重力作用下顺着浮动毛刷往下流动,而不会直接低落。
6、本实用新型的进一步技术改进在于:储水盒的顶部开设有至少一个进水孔,且进水孔与储水腔连通,实现对储水腔中的清洁液的补充。
7、本实用新型的进一步技术改进在于:储水盒的底部中间位置固定安装有固定刷毛,以便于对润湿的轨道机器人的滚轮进行清洁。
8、本实用新型的进一步技术改进在于:在工作时,浮动刷中的密封件接触对储水腔的密封,形成出水间隙,清洁液利用出水间隙进入到窄槽内,从而实现润湿滚轮的目的。
9、与现有技术相比,本实用新型具备以下有益效果:
10、通过设置浮动刷头,在不工作的情况下自动对储水腔进行密封,合理的对清洁液进行利用,利用自动行走的滚轮将浮动刷头顶起,从而接触密封,形成出水间隙,清洁液进入到橡胶密封垫底部的窄槽中,并顺着刷毛往下流动,进而润湿滚轮,再利用固定刷毛进行清洁,清洁后进行清洗,整个结构简单可靠,全自动完成整个清洗过程,且成本低,不需要额外进行维护,有效的解决了高层轨道难以清理的问题。
技术特征:
1.一种轨道机器人自动清洁装置,包括轨道(1)和储水盒(34),其特征在于,所述储水盒(34)安装在轨道(1)上,储水盒(34)的底部开设有安装槽,所述安装槽内设置有浮动刷(33),安装槽与储水盒(34)的储水腔连通,所述浮动刷(33)包括弹性件、密封件和刷毛。
2.根据权利要求1所述的一种轨道机器人自动清洁装置,其特征在于,所述弹性件为伸缩橡胶套(331),所述密封件为橡胶密封垫(332),所述刷毛为硬质的浮动刷毛(333)。
3.根据权利要求2所述的一种轨道机器人自动清洁装置,其特征在于,所述橡胶密封垫(332)的底部开设有窄槽,浮动刷毛(333)安装在窄槽中。
4.根据权利要求1所述的一种轨道机器人自动清洁装置,其特征在于,所述储水盒(34)的顶部开设有至少一个进水孔(32),且进水孔(32)与储水腔连通。
5.根据权利要求1所述的一种轨道机器人自动清洁装置,其特征在于,所述储水盒(34)的底部中间位置固定安装有固定刷毛(35)。
6.根据权利要求1所述的一种轨道机器人自动清洁装置,其特征在于,在工作时,浮动刷(33)中的密封件接触对储水腔的密封,形成出水间隙(36)。
技术总结
本技术公开了一种轨道机器人自动清洁装置,涉及轨道清洁技术领域,包括轨道和储水盒,储水盒安装在轨道上,储水盒的底部开设有安装槽,所述安装槽内设置有浮动刷,安装槽与储水盒的储水腔连通,所述浮动刷包括弹性件、密封件和刷毛;通过设置浮动刷头,在不工作的情况下自动对储水腔进行密封,合理的对清洁液进行利用,利用自动行走的滚轮将浮动刷头顶起,从而接触密封,形成出水间隙,清洁液进入到橡胶密封垫底部的窄槽中,并顺着刷毛往下流动,进而润湿滚轮,再利用固定刷毛进行清洁,清洁后进行清洗,整个结构简单可靠,全自动完成整个清洗过程,且成本低,不需要额外进行维护,有效的解决了高层轨道难以清理的问题。
技术研发人员:桂志明,胡佳飞,彭安宁
受保护的技术使用者:合肥拉塞特机器人科技有限公司
技术研发日:20221219
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!