一种脱硝管道除垢机器人
本发明涉及管道除垢,具体为一种脱硝管道除垢机器人。
背景技术:
1、对于管道的污垢清理,现存有很多清理方式,不同管道对应的污垢清理方式也不尽相同。生活及其城市用管的清理大多以人力疏通为主,也有少部分采用对应机器人或辅助工具进行管道的清理。在当下的工业管道群体中,对应管道的污垢清理就相对比较复杂,现存的工业管道内污垢清理方法主要以化学药剂法和人工振击为主,所谓化学药剂法就是通过相应化学药剂的配合,通过相应的酸碱中和反应和腐蚀来对管道内污垢进行清理,而人工振击则是通过人为敲击管道通过振动将管道内污垢震落,随后再将震落的污垢从管道内冲洗出来。
2、现存的工业管道污垢清理的方式所存在的弊端比较多,化学药剂的配比不准确将会导致管道内污垢清理不干净或者是使得管道内壁遭遇不必要的化学腐蚀,从而缩短管道使用寿命,而采用人工进行管道内污垢的清理不仅费时费力还影响生产,人工的清理的过程过于繁琐,效率也相对较低。
3、基于此,本发明设计了一种脱硝管道除垢机器人以解决上述问题。
技术实现思路
1、本发明的目的在于提供一种脱硝管道除垢机器人,以解决上述背景技术中提出的问题。
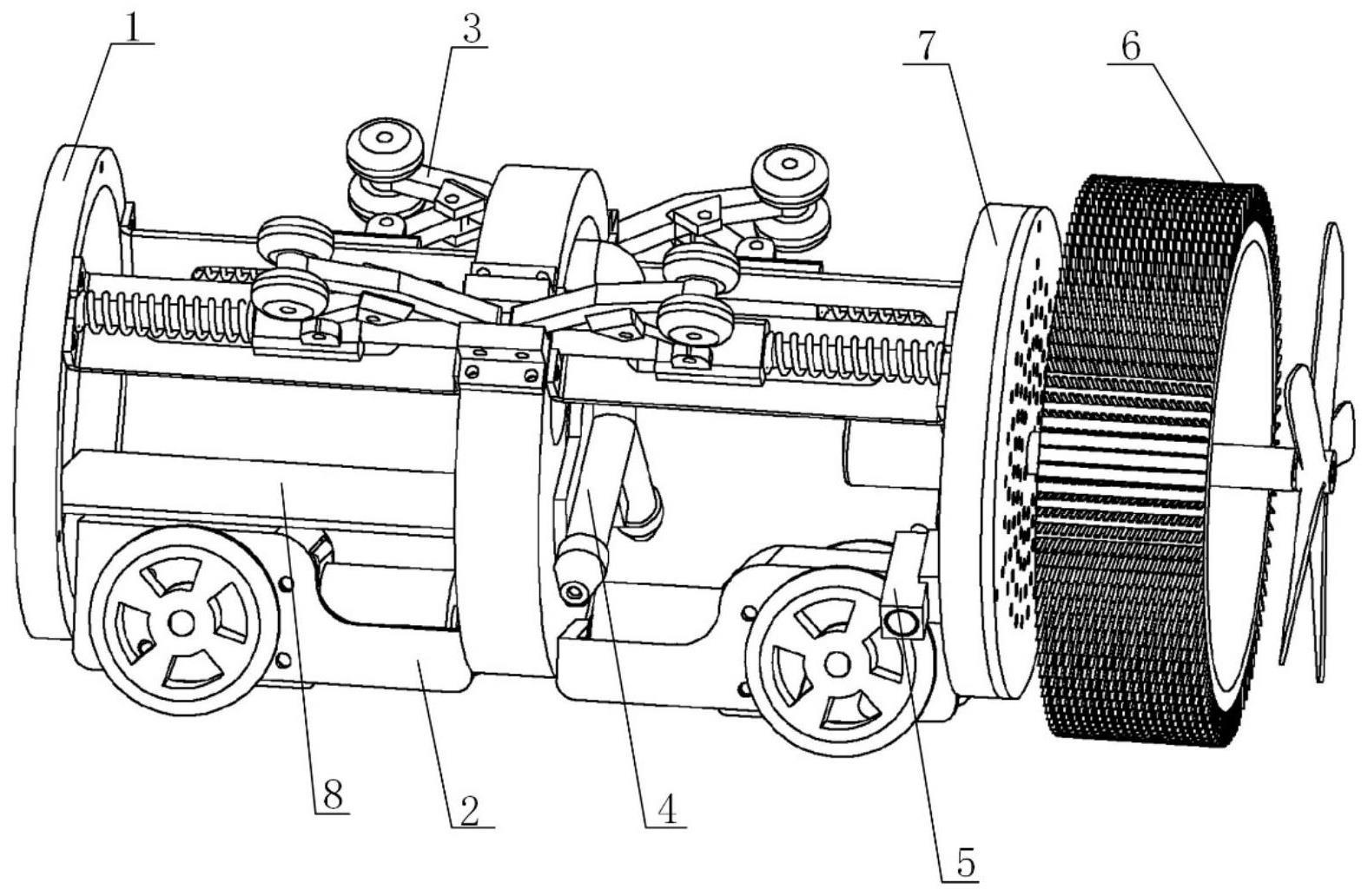
2、为实现上述目的,本发明提供如下技术方案:一种脱硝管道除垢机器人,包括管道机器人框架,行进组件,支撑组件,支路管道除垢组件,传感器组件,主管道除垢组件,主管道吹灰组件,电路板支板,行进组件安装在管道机器人框架下方且有两组,用以提供前进和后退的动力;支撑组件装配在管道机器人框架上方且有四组两两对称分布,使得管道机器人在管道内稳定行走;支路管道除垢组件位于管道机器人框架内中间部分;传感器组件安装在管道机器人框架前端;主管道除垢组件与主管道吹灰组件装配在管道机器人框架的前端,且主管道除垢组件在前,主管道吹灰组件在后。
3、优选的,管道机器人框架包括前框架圈,中框架圈,后框架圈,长支架板;前框架圈、中框架圈和后框架圈用长支架板连接在一起形成管道机器人的外框架,同时长支架板还有支撑固定的作用。
4、优选的,行进组件包括前行进组件和后行进组件,前行进组件包括主动轮、主动电机、电机支撑架;前行进组件与后行进组件均安装在管道机器人框架的下方并且二者结构相同,同时为管道机器人的前进和后退提供动力,主动电机通过外部电源进行供电。
5、优选的,支撑组件包括支撑轮,支撑短杆,支撑长杆,支撑座,弹簧滑动组件;弹簧滑动组件包括滑动长杆,滑动座和滑动弹簧;支撑组件共有相同的四组,两两位于管道机器人的左上方与右上方,呈对称分布;滑动弹簧推动滑动座为支撑杆提供支撑力,通过支撑轮将管道机器人支撑在管道内,使管道机器人在管道内稳定地进行工作。
6、优选的,支路管道除垢组件包括y形管,直角弯管,喷头,扇形转盘,转动轴承;直角弯管与水路管道进行连接,y形管连接一个直角弯管和两个喷头并一同固定在扇形转盘上对脱硝管道支管进行污垢清理;喷头中所喷出的液体具有一定的流速,对支管内污垢具有冲洗的作用;两个喷头与转动轴承间夹角为120°,扇形转盘上焊接有配重块,使得在管道机器人出现轻微倾斜时两个喷头能够始终指向管道支管。
7、优选的,传感器组件包括接近传感器,传感器座;传感器座安装于前框架圈上且左下方与右下方各一个,接近传感器用于检测金属支管。
8、优选的,主管道除垢组件包括破碎桨叶,污垢刷盘,除垢电机,连接转动轴;破碎桨叶位于污垢刷盘的前端且破碎桨叶最大外径小于管道内径,二者皆由除垢电机带动进行除垢工作,破碎桨叶用于将管道内凸起污垢块的破碎,污垢刷盘主要用于附着在管道内壁的污垢薄层的刷洗。
9、优选的,主管道吹灰组件包括气孔盘,气孔连接口,气腔盘;气孔盘上打有大小相同且分布均匀的小气孔,压力气体通过小气孔将管道机器人前方污垢刷盘洗刷下来的污垢碎末往前吹赶;气腔盘内含有气体空腔,其上方含有两个进气口,气孔连接口一端与进气口进行连接,另一端与压力气路管道连接,压力气体通过气孔连接口进入气腔盘内空腔后均匀地从气孔盘上小气孔吹出,将管道机器人前方污垢刷盘洗刷下来的污垢碎末往前吹赶。
10、一种脱硝管道除垢机器人的使用方法,包括以下步骤:
11、s101:管道机器人的直角弯管与压力液路管道进行连接,气孔连接口与压力气路管道进行连接,并进行气路和液路管道的通畅性检查。
12、s102:将管道机器人放入相关脱硝管道内后,主动轮、支撑轮和污垢刷盘的外围与管道内壁接触,主动轮与支撑轮呈倒三角分布,在主动轮的前进动力和支撑轮的辅助下管道机器人缓缓向前行走。
13、s103:在管道机器人向前行走的同时,除垢电机开始工作,带动破碎桨叶和污垢刷盘进行转动,同时气孔盘上的小气孔也开始吹气。
14、s104:在主管道进行除垢时,当管道机器人行进到支管时接近传感器检测到支管时,管道机器人会继续向前行进一小段距离使得喷头对准支管口,这一小段距离为接近传感器与喷头间的距离,然后停留片刻进行支管内污垢的冲洗,冲洗完毕后管道机器人继续向前行进,通过接近传感器和对主动电机的控制,可以使得喷头准确地对准支管口,从而进行支管内污垢的冲洗工作。
15、优选的,s104后,当支管冲洗后管道机器人继续向前行进,此时管道机器人重复s103、s104。
16、与现有技术相比,本发明的有益效果是:
17、1、本发明将管道机器人与桨叶和刷盘除垢方式进行结合,使得相关管径较小的脱硝管道内的污垢清理得以实现。
18、2、脱硝管道除垢机器人的使用不仅对管道内污垢进行了清理,同时还把对管道造成的损伤降到了最低,与此同时,对于主管道附带支管内的污垢,此管道机器人也能一同进行清理,减少了火电厂对于管道清理的一些不必要的投入。
19、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种脱硝管道除垢机器人,其特征在于,包括管道机器人框架(1),行进组件(2),支撑组件(3),支路管道除垢组件(4),传感器组件(5),主管道除垢组件(6),主管道吹灰组件(7),电路板支板(8),所述行进组件(2)安装在管道机器人框架(1)下方且有两组,用以提供前进和后退的动力;所述支撑组件(3)装配在管道机器人框架(1)上方且有四组两两对称分布,使得管道机器人在管道内稳定行走;所述支路管道除垢组件(4)位于管道机器人框架(1)内中间部分;所述传感器组件(5)安装在管道机器人框架(1)前端;所述主管道除垢组件(6)与主管道吹灰组件装(7)配在管道机器人框架(1)的前端,且主管道除垢组件(6)在前,主管道吹灰组件(7)在后。
2.根据权利要求1所述的一种脱硝管道除垢机器人,其特征在于:所述管道机器人框架(1)包括前框架圈(11),中框架圈(12),后框架圈(13),长支架板(14);所述前框架圈(11)、中框架圈(12)和后框架圈(13)用长支架板(14)连接在一起形成管道机器人的外框架,同时长支架板(14)还有支撑固定的作用。
3.根据权利要求1所述的一种脱硝管道除垢机器人,其特征在于:所述行进组件(2)包括前行进组件(21)和后行进组件(22),前行进组件包括主动轮(211)、主动电机(212)、电机支撑架(213);所述前行进组件(21)与后行进组件(22)均安装在管道机器人框架(1)的下方并且二者结构相同。
4.根据权利要求1所述的一种脱硝管道除垢机器人,其特征在于:所述支撑组件(3)包括支撑轮(31),支撑短杆(32),支撑长杆(33),支撑座(34),弹簧滑动组件(35);所述弹簧滑动组件(35)包括滑动长杆(351),滑动座(352)和滑动弹簧(353);所述支撑组件(3)共有相同的四组,两两位于管道机器人的左上方与右上方,呈对称分布;所述滑动弹簧(353)推动滑动座(352)为支撑杆提供支撑力,支撑轮(31)将管道机器人支撑在管道内。
5.根据权利要求1所述的一种脱硝管道除垢机器人,其特征在于:所述支路管道除垢组件(4)包括y形管(41),直角弯管(42),喷头(43),扇形转盘(44),转动轴承(45);所述直角弯管(42)与水路管道进行连接,y形管(41)连接一个直角弯管(42)和两个喷头(43)并一同固定在扇形转盘(44)上对脱硝管道支管进行污垢清理;所述喷头(43)中所喷出的液体具有一定的流速;所述两个喷头(43)与转动轴承(45)间夹角为120°,扇形转盘(44)上焊接有配重块,两个喷头(43)始终指向管道支管。
6.根据权利要求1所述的一种脱硝管道除垢机器人,其特征在于:所述传感器组件(5)包括接近传感器(51),传感器座(52);所述传感器座(52)安装于前框架圈(11)上且左下方与右下方各一个,所述接近传感器(51)用于检测金属支管。
7.根据权利要求1所述的一种脱硝管道除垢机器人,其特征在于:所述主管道除垢组件(6)包括破碎桨叶(61),污垢刷盘(62),除垢电机(63),连接转动轴(64);所述破碎桨叶(61)位于污垢刷盘(62)的前端且破碎桨叶(61)最大外径小于管道内径,二者皆由除垢电机(63)带动进行除垢工作。
8.根据权利要求1所述的一种脱硝管道除垢机器人,其特征在于:所述主管道吹灰组件(7)包括气孔盘(71),气孔连接口(72),气腔盘(73);所述气孔盘(71)上打有大小相同且分布均匀的小气孔,压力气体通过小气孔将管道机器人前方污垢刷盘(62)洗刷下来的污垢碎末往前吹赶;所述气腔盘(73)内含有气体空腔,其上方含有两个进气口,气孔连接口(72)一端与进气口进行连接,另一端与压力气路管道连接。
9.根据权利要求1-8任一所述的一种脱硝管道除垢机器人的使用方法,其特征在于,包括以下步骤:
10.根据权利要求9所述的一种脱硝管道除垢机器人,其特征在于:所述s104后,当支管冲洗后管道机器人继续向前行进,此时管道机器人重复s103、s104。
技术总结
本发明公开了管道除垢技术领域的一种脱硝管道除垢机器人,包括管道机器人框架,行进组件,支撑组件,支路管道除垢组件,传感器组件,主管道除垢组件,主管道吹灰组件,电路板支板,行进组件安装在管道机器人框架下方且有两组,用以提供前进和后退的动力;支撑组件装配在管道机器人框架上方且有四组两两对称分布,使得管道机器人在管道内稳定行走;支路管道除垢组件位于管道机器人框架内中间部分;传感器组件安装在管道机器人框架前端;主管道除垢组件与主管道吹灰组件装配在管道机器人框架的前端,能够将管道机器人与桨叶和刷盘除垢方式进行结合,把对管道造成的损伤降到了最低,减少火电厂对于管道清理的一些不必要的投入。
技术研发人员:刘庆运,谢满意,刘涛,白凯凯,姚红
受保护的技术使用者:安徽工业大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!