一种管道清淤机器人
本申请属于管道清淤设备,更具体地说,是涉及一种管道清淤机器人。
背景技术:
1、在长期的运送介质的过程中,管道内物质会对管道造成一定程度的侵蚀,污垢附着等,造成管道内径缩小、管道堵塞、流速变慢、介质二次污染等状况的发生。而清淤工作人员的缺少以及清淤效率低下与市场规模的不断扩大形成了供需不平等的关系。排水管道内部存在易燃易爆的有毒气体,而且管内环境相当恶劣,这就给清淤作业带来了极大的难度,并且对工作人员的生命安全也造成了严重的威胁,即使在做好各种保护措施以及安全培训的情况下,几乎每年都会有清淤工作人员伤亡的情况发生。随着水下管网总长度的持续增长,每年的清淤任务量也随之增加,但是人工清淤的效率不是很可观,大约每天5~7方,且无法对小口径管道进行清理。而管道清淤机器人的出现极大地弥补了这种不足,使工作人员安全得到了保障。
2、针对cn106368305b等绝大部分现有专利,都是采用电驱动推动管道清淤机器人前进,而能满足这种驱动力的电机的外形尺寸相对大,并且针对推动力和刀头部分的旋转力需要不同参数的电机,其固定不容易实现,考虑到管道清淤机器人长期处于水下潮湿的工作环境,电机密封也是另一大问题,在实际应用中存在较大缺陷。
3、此外,现有电驱动管道清淤机器人结构比较复杂、制作成本高、维修保养不便。
技术实现思路
1、本申请的目的在于提供一种管道清淤机器人,以解决现有技术中的管道清淤机器人采用电驱动的不足以及结构复杂的技术问题。
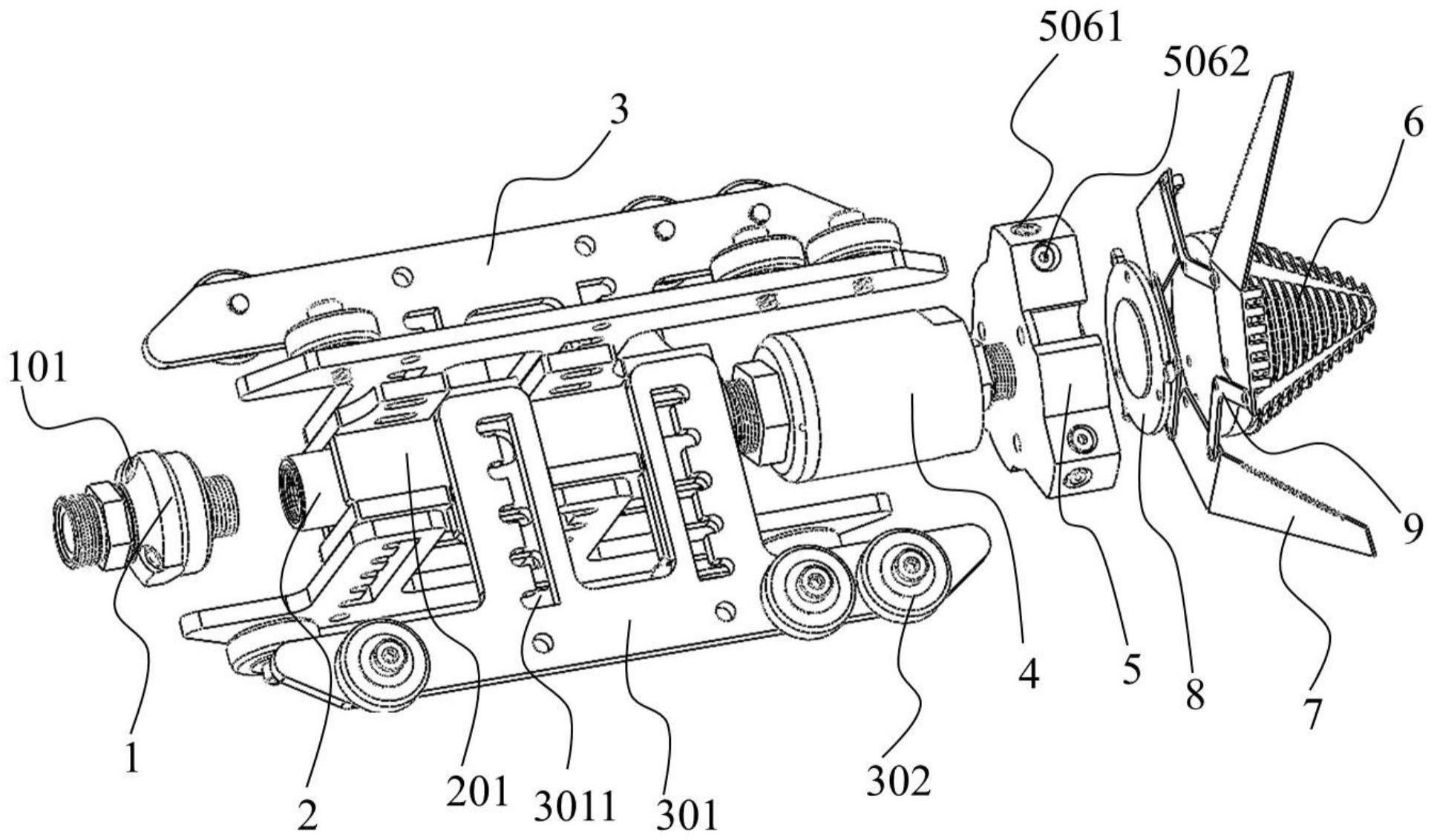
2、为实现上述目的,本申请采用的技术方案是:提供一种管道清淤机器人,包括:
3、推进喷头,其具有一中心孔道以及与所述中心孔道倾斜连通的多个第一喷孔;多个所述第一喷孔在所述推进喷头上对称设置;
4、机身壳体,其内设有流体通道;所述机身壳体的一端与所述推进喷头的一端密封连接,所述流体通道和所述中心孔道相连通;
5、行走机构,固定连接在所述机身壳体的外侧壁上;所述行走机构用于带动所述机身壳体在管道内行走;
6、连接轴,其具有中心轴孔;所述连接轴的一端与所述机身壳体的一端密封连接,所述中心轴孔与所述流体通道相连通;
7、旋转头,其包括中心筒体、套设在所述中心筒体上的转动轴承和套设在所述转动轴承上的旋转体,所述中心筒体和所述转动轴承设于所述旋转体内,所述旋转体具有第一端盖和第二端盖,所述旋转体上设有多个第二喷孔,多个所述第二喷孔在所述旋转体上对称设置,每个所述第二喷孔包括一个中心喷孔和与所述中心喷孔相连通的分支喷孔;所述第一端盖盖设在所述转动轴承的一侧,所述第二端盖密封盖设在所述旋转体的一侧;所述连接轴的一端穿过所述第一端盖与所述中心筒体的一端密封连接,所述中心筒体的另一端与多个所述第二喷孔相连通;以及,
8、钻头,其固定连接在所述旋转头上。
9、进一步地,还包括多个旋转刀片,多个旋转刀片固定连接在所述旋转头和所述钻头之间。
10、进一步地,还包括固定片,多个所述旋转刀片通过所述固定片固定连接在所述旋转头和所述钻头之间。
11、进一步地,所述旋转刀片包括呈角度连接的固定部和切割部,所述固定部的边缘上设有多个间隔排布的排齿,所述排齿与所述固定部间呈角度设置。
12、进一步地,相邻两个旋转刀片间通过v型键固定连接。
13、进一步地,所述连接轴包括:
14、内层轴体,其一端穿过所述第一端盖与所述中心筒体的一端密封连接;
15、外层轴体,套设在所述内层轴体上;所述外层轴体的一端密封连接在所述内层轴体上;以及,
16、轴端盖,其密封连接在所述外层轴体的一端,所述轴端盖的一端与所述机身壳体的一端密封连接。
17、进一步地,所述连接轴还包括油水隔离端盖,所述油水隔离端盖具有一与所述中心轴孔连通的通孔,所述油水隔离端盖外侧壁设有流油槽;所述油水隔离端盖的一端连接在所述内层轴体的一端;
18、所述轴端盖上设有注油孔,所述轴端盖套设在所述油水隔离端盖上且所述注油孔与所述流油槽相连通。
19、进一步地,所述油水隔离端盖与所述内层轴体间设有密封圈;和/或,
20、所述轴端盖与所述外层轴体间设有密封垫片。
21、进一步地,所述行走机构包括至少两组反向设置的支撑板,所述支撑板上设有行走轮;所述机身壳体上设有固定板,所述支撑板固定连接在所述固定板上。
22、进一步地,所述固定板上设有第一固定孔,沿所述支撑板的长度方向设有多个间隔排布的第二固定孔,通过在所述第一固定孔和所述第二固定孔内插入固定螺栓将所述支撑板固定连接在所述固定板上。
23、与现有技术相比,本申请具有以下的技术效果:
24、本申请的一种管道清淤机器人可通过在推进喷头的一端连接高压水进水管,可通过高压水驱动推进喷头,使得推进喷头产生前进驱动力,进而带动机身壳体上的行走机构行走;高压水进入到旋转头后可驱动旋转体旋转,进而带动固定连接在旋转体上的钻头旋转。本申请的一种管道清淤机器人通过高压水驱动机器人前进以及钻头旋转,可克服现有采用电机驱动机器人的弊端,且无需考虑水下应用环境时的电机密封问题。此外,本申请的一种管道清淤机器人结构简单可靠、维修保养方便。
技术特征:
1.一种管道清淤机器人,其特征在于,包括:
2.如权利要求1所述的一种管道清淤机器人,其特征在于,还包括多个旋转刀片,多个旋转刀片固定连接在所述旋转头和所述钻头之间。
3.如权利要求2所述的一种管道清淤机器人,其特征在于,还包括固定片,多个所述旋转刀片通过所述固定片固定连接在所述旋转头和所述钻头之间。
4.如权利要求2所述的一种管道清淤机器人,其特征在于,所述旋转刀片包括呈角度连接的固定部和切割部,所述固定部的边缘上设有多个间隔排布的排齿,所述排齿与所述固定部间呈角度设置。
5.如权利要求2所述的一种管道清淤机器人,其特征在于,相邻两个旋转刀片间通过v型键固定连接。
6.如权利要求1所述的一种管道清淤机器人,其特征在于,所述连接轴包括:
7.如权利要求6所述的一种管道清淤机器人,其特征在于,所述连接轴还包括油水隔离端盖,所述油水隔离端盖具有一与所述中心轴孔连通的通孔,所述油水隔离端盖外侧壁设有流油槽;所述油水隔离端盖的一端连接在所述内层轴体的一端;
8.如权利要求7所述的一种管道清淤机器人,其特征在于,所述油水隔离端盖与所述内层轴体间设有密封圈;和/或,
9.如权利要求1-8任意一项所述的一种管道清淤机器人,其特征在于,所述行走机构包括至少两组反向设置的支撑板,所述支撑板上设有行走轮;所述机身壳体上设有固定板,所述支撑板固定连接在所述固定板上。
10.如权利要求9所述的一种管道清淤机器人,其特征在于,所述固定板上设有第一固定孔,沿所述支撑板的长度方向设有多个间隔排布的第二固定孔,通过在所述第一固定孔和所述第二固定孔内插入固定螺栓将所述支撑板固定连接在所述固定板上。
技术总结
本申请提供了一种管道清淤机器人,包括推进喷头、机身壳体、行走机构、连接轴、旋转头和钻头。本申请的一种管道清淤机器人可通过在推进喷头的一端连接高压水进水管,可通过高压水驱动推进喷头,使得推进喷头产生前进驱动力,进而带动机身壳体上的行走机构行走;高压水进入到旋转头后可驱动旋转体旋转,进而带动固定连接在旋转体上的钻头旋转。本申请的一种管道清淤机器人通过高压水驱动机器人前进以及钻头旋转,可克服现有采用电机驱动机器人的弊端,且无需考虑水下应用环境时的电机密封问题。此外,本申请的一种管道清淤机器人结构简单可靠、维修保养方便。
技术研发人员:候乾毅,叶熠龙,李玉璇,夏凯,高天翔
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!