一种原位淤泥固化搅拌设备辅助控制系统的制作方法
本发明涉及土木工程,具体为一种原位淤泥固化搅拌设备辅助控制系统。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、原位淤泥固化搅拌设备是一种由操作人员控制,能够通过配备刃或齿的搅拌头,并通过搅拌头的双向旋转作用将固化剂与淤泥质软土高效充分混合,提高固化剂与土混合的均匀程度,达到软土加固及污染土的修复效果的一种土木机械。
3、目前,由于原位淤泥固化搅拌设备缺少引导控制手段,作业期间依赖于操作人员的经验:借视觉、感觉以及测量人员的配合进行搅拌工作,搅拌质量不稳定,搅拌范围不精确。使得控制搅拌范围,明确搅拌高程,需要消耗大量人力和时间来完成,综合效率低下。
技术实现思路
1、为了解决上述背景技术中存在的技术问题,本发明提供一种原位淤泥固化搅拌设备辅助控制系统,通过在施工前设定好搅拌机搅拌范围以及搅拌高程,施工时对搅拌机的搅拌位置数据进行实时信息采集并分析处理后,获得搅拌头的实时搅拌位置信息和搅拌高程信息,从而为施工人员以及搅拌机驾驶人员提供实时搅拌信息,并且在搅拌机超出搅拌范围或超出搅拌高程时给出警报提醒。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种原位淤泥固化搅拌设备辅助控制系统,包括:
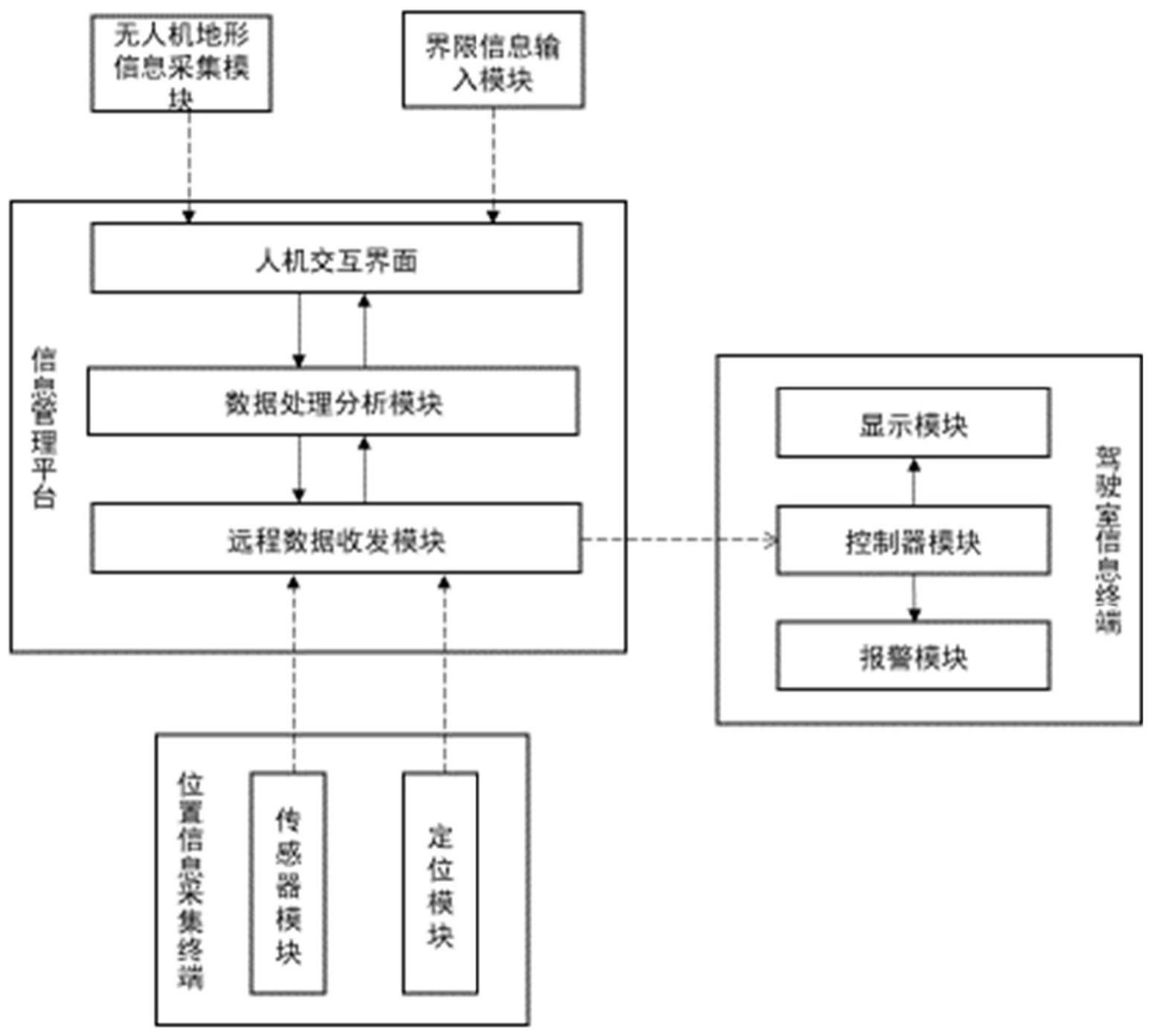
4、信息采集终端,包括定位模块和传感器模块,定位模块获取搅拌设备工作位置并发送给信息管理平台,传感器模块获取搅拌设备动臂与水平面的倾角和信息采集终端的位置信息,并发送给信息管理平台;
5、信息管理平台,接收信息采集终端获取的信息,得到搅拌设备的工作位置和搅拌高程,并发送给驾驶室信息终端;根据搅拌设备工作位置判断是否超出作业范围界限,并将判断结果发送给驾驶室信息终端;根据搅拌设备动臂的长度、动臂与水平面的倾角、信息采集终端的位置信息和设定的搅拌高程,判断搅拌设备的是否超出搅拌高程界限,并发送给驾驶室信息终端;
6、驾驶室信息终端,位于搅拌设备的驾驶室内,接收信息管理平台发来的结果并产生报警信号。
7、传感器模块包括连接在动臂上的倾角传感器和高程传感器;倾角传感器获取动臂与水平面之间的夹角;动臂一端连接搅拌设备的搅拌头,另一端活动连接工作臂;传感器模块和定位模块连接在一起,通过高程传感器获取信息采集终端的位置信息。
8、还具有无人机地形信息采集模块和界限信息输入模块,无人机地形信息采集模块获取作业区域的地形数据,并输入到信息管理平台中,通过界限信息输入模块设定搅拌设备的作业范围界限和搅拌高程界限。
9、信息管理平台包括通讯连接的人机交互界面、数据分析处理模块和远程数据收发模块,数据处理分析模块保存无人机地形信息扫描模块采集的地形数据和界限信息输入模块输入的搅拌范围界限以及搅拌高程界限数据,开始施工时,根据位置信息采集终端获取的数据得到搅拌设备的作业位置数据和搅拌高程数据,同时将作业位置数据和搅拌高程数据发送给驾驶室信息终端,并根据设定的作业范围界限和搅拌高程界限对比作业位置数据和搅拌高程数据,若超出界限,向驾驶室信息终端发出报警。
10、驾驶室信息终端包括与信息管理平台中的远程数据收发模块通讯连接的控制器模块,控制器模块分别与显示模块和报警模块通讯连接,通过控制器模块显示搅拌设备的作业信息和报警信息。
11、信息管理平台获得搅拌设备的动臂长度l、动臂与水平面之间的夹角θ、信息采集终端的位置信息h0、设定搅拌位置h2和相对零点位置h3,h0>搅拌头位置>h2>h3,搅拌设备的搅拌头距离设定搅拌位置h2的实时高度h=h0-h3-h2-lsinθ。
12、判断搅拌设备的是否超出搅拌高程界限,具体为:如果h≥0,则搅拌设备的搅拌高程未超出高程界限,否则超出高程界限。
13、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
14、在施工前设定好搅拌设备的作业范围以及搅拌高程,施工时对搅拌设备的作业数据进行信息采集并处理后,获得搅拌头的位置信息和高程信息,从而为施工人员以及搅拌设备驾驶人员提供实时的搅拌作业信息,并且在搅拌机超出搅拌范围或超出搅拌高程时给出警报提醒,减少对作业人员现场经验的依赖,使得搅拌作业的范围和高程更加精确。
技术特征:
1.一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,包括:
2.如权利要求1所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,所述传感器模块包括连接在动臂上的倾角传感器和高程传感器;倾角传感器获取动臂与水平面之间的夹角;传感器模块和定位模块连接在一起,通过高程传感器获取信息采集终端的位置信息。
3.如权利要求2所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,所述动臂一端连接搅拌设备的搅拌头,另一端活动连接工作臂。
4.如权利要求1所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,还具有无人机地形信息采集模块和界限信息输入模块,无人机地形信息采集模块获取作业区域的地形数据,并输入到信息管理平台中,通过界限信息输入模块设定搅拌设备的作业范围界限和搅拌高程界限。
5.如权利要求1所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,所述信息管理平台包括通讯连接的人机交互界面、数据分析处理模块和远程数据收发模块,数据处理分析模块保存无人机地形信息扫描模块采集的地形数据和界限信息输入模块输入的搅拌范围界限以及搅拌高程界限数据。
6.如权利要求5所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,开始施工时,信息管理平台根据位置信息采集终端获取的数据得到搅拌设备的作业位置数据和搅拌高程数据,将作业位置数据和搅拌高程数据发送给驾驶室信息终端,并根据设定的作业范围界限和搅拌高程界限对比作业位置数据和搅拌高程数据,若超出界限,向驾驶室信息终端发出报警。
7.如权利要求1所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,所述驾驶室信息终端包括与信息管理平台中的远程数据收发模块通讯连接的控制器模块,控制器模块分别与显示模块和报警模块通讯连接,通过控制器模块显示搅拌设备的作业信息和报警信息。
8.如权利要求1所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,所述信息管理平台获得搅拌设备的动臂长度l、动臂与水平面之间的夹角θ、信息采集终端的位置信息h0、设定搅拌位置h2和相对零点位置h3,h0>搅拌头位置>h2>h3。
9.如权利要求8所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,搅拌设备的搅拌头距离设定搅拌位置h2的实时高度h=h0-h3-h2-lsinθ。
10.如权利要求9所述的一种原位淤泥固化搅拌设备辅助控制系统,其特征在于,判断搅拌设备的是否超出搅拌高程界限,具体为:如果h≥0,则搅拌设备的搅拌高程未超出高程界限,否则超出高程界限。
技术总结
本发明涉及一种原位淤泥固化搅拌设备辅助控制系统,其中的信息采集终端包括定位模块和传感器模块,定位模块获取搅拌设备工作位置并发送给信息管理平台,传感器模块获取搅拌设备动臂与水平面的倾角和信息采集终端的位置信息发送给信息管理平台;信息管理平台接收信息采集终端获取的信息,根据搅拌设备工作位置判断是否超出作业范围界限,将结果发送给驾驶室信息终端;根据搅拌设备动臂的长度、动臂与水平面的倾角、信息采集终端的位置信息和设定的搅拌位置,判断搅拌设备的是否超出搅拌高程界限,并将判断结果发送给驾驶室信息终端;驾驶室信息终端位于搅拌设备的驾驶室内,接收信息管理平台发来的判断结果并根据结果发出报警信号。
技术研发人员:邢晓波,张广帅,李伟,张炯,李镇,侯召,张旭旭,刘佳,刘振国,刘慧宁,胡德功,飞鹏,李宏伟,李雷波,段晓峰,王昆,王友冕
受保护的技术使用者:山东高速青岛建设管理有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!