一种多功能性多级电动推杆的制作方法
本发明属于清洗机器人,具体地说,涉及一种多功能性多级电动推杆。
背景技术:
1、随着我国石油消费量的逐年增加,战略石油储备关系国家石油安全,利用储油罐对石油进行存储是战略石油储备的主要方式,但是随着储油罐使用年限的增长,储油罐内部的油泥沉淀会日益严重,因此需要对储油罐进行定期清洗,油罐的清洗大部分采用人工清洗,由于油品在油罐内长期储存,油品在毛吸作用下会在相接触的罐壁上残留一定的油分,这部分油分会在特定的条件下逐渐挥发,因此人员在罐内施工时容易中毒或发生火灾、爆炸。
2、为了对储油罐内壁清洁的更加便捷安全,现有技术中储油罐清洗会采用清洗机器人来替代人工对其进行清洗,为了便于清洗机器人能够在储油罐内稳定的进行移动行走,会在机器人底部与行走机构之间设置多级电动推杆,然后通过控制多级电动推杆伸长,来使行走机构的行走轮与罐壁紧贴,从而便可使清洗机器人在罐体内进行行走,由于行走机构安装在多级电动推杆的伸缩端处,并且多级电动推杆自身以及行走机构均需通电使用,因此需要在多级电动推杆上布置导线,以对其进行供电,但是当清洗机器人在对罐壁进行清洗时,从罐壁上清除的杂质以及清洗时产生的水汽、水珠可能会掉落依附到布置的导线上,以至于导线可能会因受到侵蚀,而出现接触不良或短路,造成安全隐患,并且影响清洗机器人的正常运行,有鉴于此特提出本发明。
技术实现思路
1、本发明要解决的技术问题在于克服现有技术的不足,提供一种可以克服上述问题或者至少部分地解决上述问题的多功能性多级电动推杆。
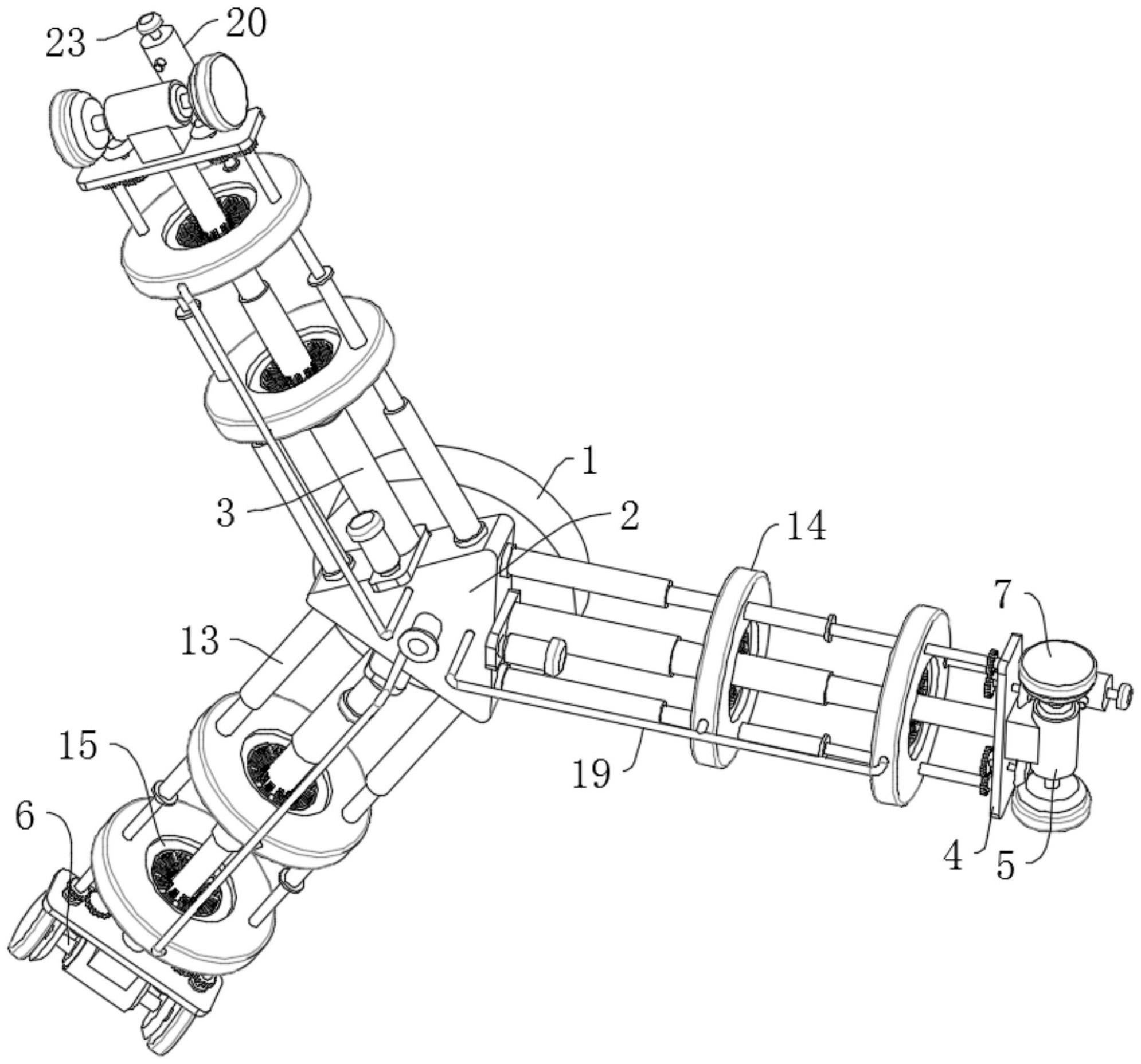
2、为解决上述技术问题,本发明采用技术方案的基本构思是:一种多功能性多级电动推杆,包括呈圆周等间距安装在清洗机器人底座下端的多级电动推杆本体,还包括:储气箱,固定连接在所述清洗机器人底座的底部;所述多级电动推杆本体呈圆周等间距固定连接在储气箱的外侧;所述清洗机器人的行走机构通过安装板安装在多级电动推杆本体的伸缩端部;移动气环,滑动在所述多级电动推杆本体的多根伸缩节上;喷气管,呈圆周等间距设置在所述移动气环的内侧,且与所述移动气环相接通;伸缩式气管,接通在所述储气箱靠近多级电动推杆本体的位置,所述伸缩式气管的出气口与移动气环的进气口相接通,所述伸缩式气管的进气口处安装有电磁阀门;其中,所述移动气环在多级电动推杆本体的伸缩节上往复移动时,使得所述储气箱内的气体通过伸缩式气管进入到移动气环内,并经过所述喷气管喷向多级电动推杆本体的伸缩节表面。
3、进一步地,所述清洗机器人的行走机构包括双轴电机、驱动轴以及行走轮,所述双轴电机固定连接在安装板远离多级电动推杆本体的一侧,所述驱动轴固定连接在双轴电机两侧的输出端上,所述行走轮固定连接在驱动轴远离双轴电机的一端。
4、为了便于带动移动气环进行往复移动,更进一步地,所述多级电动推杆本体的两侧对称设有两根多级导向伸缩杆,所述多级导向伸缩杆的两端分别与储气箱、安装板转动连接,所述多级导向伸缩杆的伸缩节与多级电动推杆本体的伸缩节数量相同,所述移动气环滑动在两组多级导向伸缩杆相对应的伸缩节上,且与其中一组多级导向伸缩杆的伸缩节通过往复螺纹连接,设有往复螺纹的所述多级导向伸缩杆与相邻的驱动轴之间通过传动组件连接。
5、再进一步地,所述传动组件包括第一锥齿轮、传动杆、第二锥齿轮、传动齿轮以及外齿圈,所述第一锥齿轮固定连接在与设有往复螺纹的多级导向伸缩杆相邻的驱动轴上,所述传动杆转动连接在安装板靠近第一锥齿轮的位置,所述第二锥齿轮固定连接在传动杆上,且与所述第一锥齿轮相啮合,所述传动齿轮固定连接在传动杆远离第二锥齿轮的一端,所述外齿圈固定连接在靠近传动齿轮的多级导向伸缩杆的伸缩节上,且与所述传动齿轮相啮合。
6、为了便于使移动气环更加平稳顺畅的在多级电动推杆本体的伸缩节上移动,还进一步地,两根所述多级导向伸缩杆的伸缩节均与移动气环通过往复螺纹连接,两根所述多级导向伸缩杆的伸缩节上的往复螺纹呈相反的方向设置。
7、为了便于使气体更加均匀的喷射到布置的导线上,进一步地,所述移动气环内开设有环形限位滑槽,所述环形限位滑槽内转动连接有凹型转环,所述凹型转环上位于环形限位滑槽内部呈圆周等间距固定连接有多块驱动板,所述凹型转环上位于每两块驱动板之间均开设有通口,多跟所述喷气管的进气口分别与相邻的通口相接通,所述伸缩式气管的出气端呈倾斜设置。
8、为了便于对依附的杂质进行更加充分的去除,更进一步地,所述凹型转环内壁上位于每两个喷气管之间均固定连接有清扫刷。
9、为了便于工作人员根据敲击发出的声响得知清洗机器人所在的位置,更进一步地,所述安装板靠近双轴电机的一侧上端安装有敲击锤。
10、采用上述技术方案后,本发明与现有技术相比具有以下有益效果:本发明通过储气箱、多级导向伸缩杆、移动气环、喷气管以及传动组件等的配合使用,当清洗机器人在行走机构的带动下进行移动时,可以带动移动气环在多级电动推杆本体上布置的导线表面上进行往复移动喷气,避免清洗机器人在对罐壁清洗时,脱落的杂质以及水珠依附到布置的导线上,以至于对导线造成侵蚀,从而因导线出现接触不良或短路,影响清洗机器人的正常运行;通过使喷射的气体采用惰性气体,喷射的惰性气体可以降低多级电动推杆和行走机构周围的氧浓度,从而可以避免导线因接触不良或短路而产生电火花,降低了安全事故的发生,有效地保证了清洗机器人在对储油罐进行清洗时的安全性。
11、下面结合附图对本发明的具体实施方式作进一步详细的描述。
技术特征:
1.一种多功能性多级电动推杆,包括呈圆周等间距安装在清洗机器人底座(1)下端的多级电动推杆本体(3),其特征在于,还包括:
2.根据权利要求1所述的一种多功能性多级电动推杆,其特征在于,所述清洗机器人的行走机构包括双轴电机(5)、驱动轴(6)以及行走轮(7),所述双轴电机(5)固定连接在安装板(4)远离多级电动推杆本体(3)的一侧,所述驱动轴(6)固定连接在双轴电机(5)两侧的输出端上,所述行走轮(7)固定连接在驱动轴(6)远离双轴电机(5)的一端。
3.根据权利要求2所述的一种多功能性多级电动推杆,其特征在于,所述多级电动推杆本体(3)的两侧对称设有两根多级导向伸缩杆(13),所述多级导向伸缩杆(13)的两端分别与储气箱(2)、安装板(4)转动连接,所述多级导向伸缩杆(13)的伸缩节与多级电动推杆本体(3)的伸缩节数量相同,所述移动气环(14)滑动在两组多级导向伸缩杆(13)相对应的伸缩节上,且与其中一组多级导向伸缩杆(13)的伸缩节通过往复螺纹连接,设有往复螺纹的所述多级导向伸缩杆(13)与相邻的驱动轴(6)之间通过传动组件连接。
4.根据权利要求3所述的一种多功能性多级电动推杆,其特征在于,所述传动组件包括第一锥齿轮(8)、传动杆(9)、第二锥齿轮(10)、传动齿轮(11)以及外齿圈(12),所述第一锥齿轮(8)固定连接在与设有往复螺纹的多级导向伸缩杆(13)相邻的驱动轴(6)上,所述传动杆(9)转动连接在安装板(4)靠近第一锥齿轮(8)的位置,所述第二锥齿轮(10)固定连接在传动杆(9)上,且与所述第一锥齿轮(8)相啮合,所述传动齿轮(11)固定连接在传动杆(9)远离第二锥齿轮(10)的一端,所述外齿圈(12)固定连接在靠近传动齿轮(11)的多级导向伸缩杆(13)的伸缩节上,且与所述传动齿轮(11)相啮合。
5.根据权利要求4所述的一种多功能性多级电动推杆,其特征在于,两根所述多级导向伸缩杆(13)的伸缩节均与移动气环(14)通过往复螺纹连接,两根所述多级导向伸缩杆(13)的伸缩节上的往复螺纹呈相反的方向设置。
6.根据权利要求1所述的一种多功能性多级电动推杆,其特征在于,所述移动气环(14)内开设有环形限位滑槽(1401),所述环形限位滑槽(1401)内转动连接有凹型转环(15),所述喷气管(17)等间距固定连接在凹型转环(15)的内壁上,且与所述环形限位滑槽(1401)相接通。
7.根据权利要求6所述的一种多功能性多级电动推杆,其特征在于,所述凹型转环(15)上位于环形限位滑槽(1401)内部呈圆周等间距固定连接有多块驱动板(16),所述凹型转环(15)上位于每两块驱动板(16)之间均开设有通口,多跟所述喷气管(17)的进气口分别与相邻的通口相接通。
8.根据权利要求7所述的一种多功能性多级电动推杆,其特征在于,所述伸缩式气管(19)的出气端呈倾斜设置。
9.根据权利要求6所述的一种多功能性多级电动推杆,其特征在于,所述凹型转环(15)内壁上位于每两个喷气管(17)之间均固定连接有清扫刷(18)。
技术总结
本发明公开了一种多功能性多级电动推杆,涉及清洗机器人领域。一种多功能性多级电动推杆,包括呈圆周等间距安装在清洗机器人底座下端的多级电动推杆本体,还包括:储气箱,固定连接在所述清洗机器人底座的底部;本发明可以带动移动气环在多级电动推杆本体上布置的导线表面上进行往复移动喷气,避免清洗机器人在对罐壁清洗时,脱落的杂质以及水珠依附到布置的导线上,以至于对导线造成侵蚀,从而因导线出现接触不良或短路;通过使喷射的气体采用惰性气体,喷射的惰性气体可以降低多级电动推杆和行走机构周围的氧浓度,从而避免导线因接触不良或短路而产生电火花,降低了安全事故的发生,有效地保证了清洗机器人在对储油罐进行清洗时的安全性。
技术研发人员:任城钰,孙致富,鹿云海
受保护的技术使用者:江苏鑫科特种机器人研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!