一种基于视觉反馈的光伏板边框积灰清洗系统
本申请属于太阳能光伏发电,具体涉及一种基于视觉反馈的光伏板边框积灰清洗系统。
背景技术:
1、随着光伏系统的长期运行,所面临积灰清洗问题日益凸显。大气中的灰尘覆盖在光伏板表面形成积灰,阻碍散热的同时严重降低光伏系统的发电效率与系统安全。特别是光伏板边框部分残存积灰,这些积灰会导致光伏组件的最大功率点(mpp)低于其它组件,受到组件串联的“木桶效应”影响,将会降低整串组件的发电量,甚至减小发电量达10%以上。目前,光伏清洗机器人无疑是解决光伏板积灰的一种新型、高效技术手段,在光伏现场取得了良好的实际应用效果。但传统的光伏清洗机器人仍存在工作效率低、功耗大、清洗不完全等问题。运行经验表明亟需一种具有光伏板边框积灰定点、高效、无水清洗系统,为现场运维人员提供一个简单、高效的运维工具。
技术实现思路
1、本申请旨在解决现有技术的不足,提出一种基于视觉反馈的光伏板边框积灰清洗系统,借助嵌入式积灰视觉检测模型与无水清洗方式,即可实现光伏板边框积灰的准确识别和高效清洗等特点,克服传统光伏清洗机器人存在效率低、功耗大、清洗无反馈导致局部清洗不彻底等问题,提升除尘效率、节省能耗,对实现光伏精细化运维具有重要意义。
2、为实现上述目的,本申请提供了如下方案:
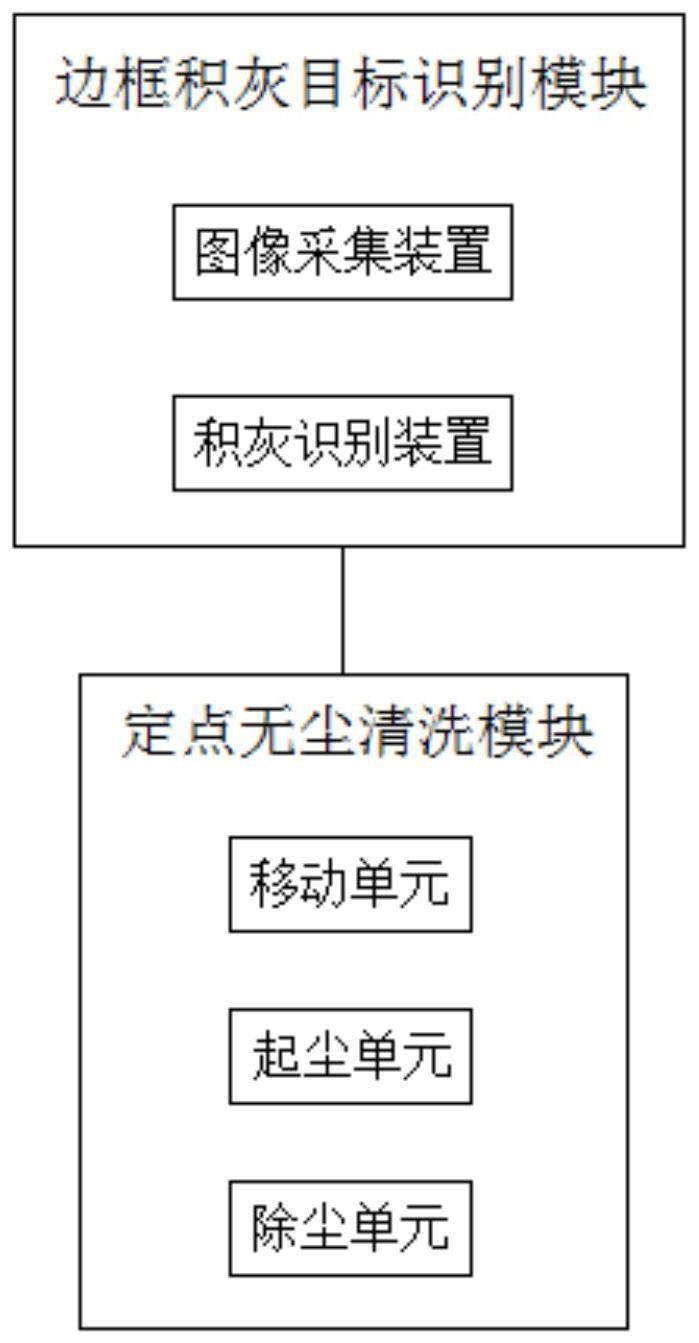
3、一种基于视觉反馈的光伏板边框积灰清洗系统,包括:边框积灰目标识别模块和定点无尘清洗模块;
4、所述边框积灰目标识别模块用于基于积灰检测模型识别积灰位置;
5、所述定点无尘清洗模块用于基于所述积灰位置进行灰尘清洗。
6、优选的,所述边框积灰目标识别模块包括:图像采集装置和积灰识别装置;
7、所述图像采集装置用于采集光伏板图像;
8、所述积灰识别装置用于基于所述积灰检测模型对所述光伏板图像进行检测,得到所述积灰位置。
9、优选的,所述积灰检测模型包括:图像预处理网络、骨干网络、颈部网络和头部网络;
10、所述图像预处理网络用于对所述光伏板图像进行缩放处理,并进行归一化和通道排序处理,得到处理后图像;
11、所述骨干网络用于将所述处理后图像进行卷积池化操作,得到不同层次特征图像;
12、所述颈部网络用于将所述不同层次特征图像进行特征融合,得到融合后图像;
13、所述头部网络用于基于所述融合后图像进行目标预测,得到所述积灰位置。
14、优选的,所述骨干网络包括:第一卷积单元和第二卷积单元;
15、所述第一卷积单元包括1层foucs单元;
16、所述第二卷积单元包括4组cbs单元和dsconv单元。
17、优选的,定点无尘清洗模块包括:移动单元、起尘单元和除尘单元;
18、所述移动单元用于控制所述清洗系统移动至所述积灰位置;
19、所述起尘单元用于完成灰尘的起尘过程,生成灰尘-空气混合气体;
20、所述除尘单元用于抽取所述灰尘-空气混合气体,沉降大颗粒灰尘,并过滤小颗粒灰尘。
21、优选的,所述移动单元包括:北斗导航装置、负压移动载体和驱动轮;
22、所述移动单元的工作流程包括:由所述北斗导航模块基于所述积灰位置提供在光伏板表面的位置信息,再由所述驱动轮带动所述负压移动载体控制所述清洗系统在光伏板表面进行移动。
23、优选的,所述起尘单元包括:尼龙轻质滚刷、直流电机和联轴器;
24、所述起尘单元的工作流程包括:通过所述联轴器将所述直流电机与所述尼龙轻质滚刷相连接,所述直流电机带动所述尼龙轻质滚刷旋转,所述尼龙轻质滚刷的刷丝扫过光伏板表面,破坏灰尘沉积结构,并将其扬起,完成灰尘的起尘过程,生成所述灰尘-空气混合气体。
25、优选的,所述除尘单元包括:离心风机、滤网和集尘盒;
26、所述除尘单元的工作流程包括:所述离心风机引导所述灰尘-空气混合气体通过引风通道进入所述集尘盒,较大的灰尘颗粒在重力作用下沉积在所述集尘盒底部,较小的灰尘颗粒通过所述滤网过滤,与空气分离,经除尘之后的洁净空气被所述离心风机抽走,通过通风口排出所述清洗系统。
27、优选的,所述定点无尘清洗模块还包括:密封毛条和吸尘腔;
28、所述密封毛条和所述吸尘腔形成的封闭的区域,将悬浮的灰尘颗粒限制其中,防止灰尘飘落到已清洁光伏组件而造成二次污染。
29、与现有技术相比,本申请的有益效果为:
30、本申请利用基于机器视觉方法和无水清洗方式解决光伏板边框积灰的问题,相对于传统光伏清洗机器人存在效率低、功耗大、清洗无反馈导致局部清洗不彻底,具有精度更高的积灰识别功能和高效的无水清洗能力,对电站的智能化运维发展提供重要的指导意义。本申请可以根据边框积灰的累积程度和分布范围增加或减少清洗系统驻停时间以实现定点、智能清洗,较传统光伏清洗系统,增加边框积灰识别能力,具有更高清洗效率及更低的功耗。
技术特征:
1.一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,包括:边框积灰目标识别模块和定点无尘清洗模块;
2.根据权利要求1所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,所述边框积灰目标识别模块包括:图像采集装置和积灰识别装置;
3.根据权利要求2所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,所述积灰检测模型包括:图像预处理网络、骨干网络、颈部网络和头部网络;
4.根据权利要求3所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,所述骨干网络包括:第一卷积单元和第二卷积单元;
5.根据权利要求1所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,定点无尘清洗模块包括:移动单元、起尘单元和除尘单元;
6.根据权利要求5所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,所述移动单元包括:北斗导航装置、负压移动载体和驱动轮;
7.根据权利要求5所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,所述起尘单元包括:尼龙轻质滚刷、直流电机和联轴器;
8.根据权利要求5所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,所述除尘单元包括:离心风机、滤网和集尘盒;
9.根据权利要求5所述一种基于视觉反馈的光伏板边框积灰清洗系统,其特征在于,所述定点无尘清洗模块还包括:密封毛条和吸尘腔;
技术总结
本申请公开了一种基于视觉反馈的光伏板边框积灰清洗系统,包括:边框积灰目标识别模块和定点无尘清洗模块;所述边框积灰目标识别模块用于基于积灰检测模型识别积灰位置;所述定点无尘清洗模块用于基于所述积灰位置进行灰尘清洗。本申请利用基于机器视觉方法和无水清洗方式解决光伏板边框积灰的问题,相对于传统光伏清洗机器人存在效率低、功耗大、清洗无反馈导致局部清洗不彻底,具有精度更高的积灰识别功能和高效的无水清洗能力,对电站的智能化运维发展提供重要的指导意义。
技术研发人员:范思远,申松达,曹生现,孙天一,王恭,刘鹏,高涵,胡夏夏,王啸,赵波
受保护的技术使用者:东北电力大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!