一种污水管道内壁清理机器人的制作方法
本发明涉及污水管道内壁清理机器人,具体涉及一种污水管道内壁清理机器人。
背景技术:
1、在处理污水管道内壁结垢的过程中,清理机器人通过旋转自身的刮刀对污水管道内壁的结垢进行清理,对污水管道内壁进行清洁。
2、现有的清理机器人能够处理污水管道内壁结垢,但清理不够干净;一、清理机器人在长时间清理结垢时,结垢会对刮刀内壁空间进行阻塞,导致刮刀刮结垢的时候结垢不能及时出刮刀内壁,仅仅对结垢厚度刮除,导致污水管道内壁结垢任有残留;二、清理机器人对污水管道内壁清理结垢,结垢掉落时任然留在污水管道内壁中,没有对污水管道内壁的结垢进行收集。
3、因此,发明一种污水管道内壁清理机器人来解决上述对刮刀内部空间停留的结垢进行处理;对污水管道内壁掉落的结垢进行收集的问题。
技术实现思路
1、为解决上述技术问题,本发明提出一种污水管道内壁清理机器人。
2、本发明的技术方案是这样实现的:
3、一种污水管道内壁清理机器人,包括动力支架、延伸传动轴、传动外壳、传动圆板、限位杆、刮刀组和回收笼,其特征在于,所述刮刀组内部设置有第一刮刀片,所述第一刮刀片端部设置有第二刮刀片,且第一刮刀片和第二刮刀片之间设置有转心轴,且第二刮刀片以转心轴为中心做摆动运动,所述第二刮刀片外表面设置有第三刮刀片,所述第二刮刀片外表面固定连接有有转向杆,所述刮刀组内部设置有回收笼,所述回收笼外表面固定连接有斜杆,所述斜杆外表面开设有脱离槽,所述回收笼外表面开设有回收口,所述回收笼外表面固定连接有第二齿轮,所述第二齿轮与反向齿轮相啮合,所述反向齿轮与第一齿轮相啮合,所述第一齿轮外表面固定连接有第三传动锥齿轴,所述第三传动锥齿轴的锥齿与第二伸缩转轴一端的锥齿想啮合,所述第二伸缩转轴另一端的锥齿与锥齿空心架的锥齿相啮合。
4、进一步地,所述延伸传动轴一端固定连接有动力电机,且延伸传动轴从锥齿空心架通孔中穿过,所述动力电机另一端固定连接与加速齿轮组动力接入端,所述加速齿轮组动力输出端固定连接有第一传动锥齿轴,所述第一传动锥齿轴与第一伸缩转轴的一端锥齿相啮合,所述第一伸缩转轴另一端锥齿与第二传动锥齿轴的锥齿相啮合,所述第二传动锥齿轴端部固定连接有传动圆板。
5、进一步地,所述传动外壳内部设置有第一伸缩转轴,且第一伸缩转轴通过第一保持板间接与传动外壳连接,且第一伸缩转轴与第一保持板之间设置轴承。
6、进一步地,所述传动外壳外表面固定连接有稳定板,且稳定板对部分加速齿轮组进行定位。
7、进一步地,所述稳定板外表面固定连接有固定板,且固定板的端部与延伸传动轴的外表面为固定连接,所述稳定板端部固定连接有存储外壳。
8、进一步地,所述存储外壳外表面固定连接有第二保持板,所述第二保持板内部设置有第二伸缩转轴,所述存储外壳的端部与锥齿空心架的外表面为活动连接。
9、进一步地,所述传动圆板的外表面与传动外壳的端口为活动连接,所述传动圆板外表面固定连接有限位杆。
10、进一步地,所述限位杆的位于刮刀组的第一刮刀片底端的限位孔为内部,且限位杆与第一刮刀片底端的限位孔设置有旋转角度的限位,所述限位杆端部固定连接有滑块,且滑块与回收笼外表面为滑动连接。
11、进一步地,所述回收笼内部设置有涡旋片,所述涡旋片的轴心线处固定连接有涡旋轴,所述涡旋轴端面与存储外壳内表面为固定连接。
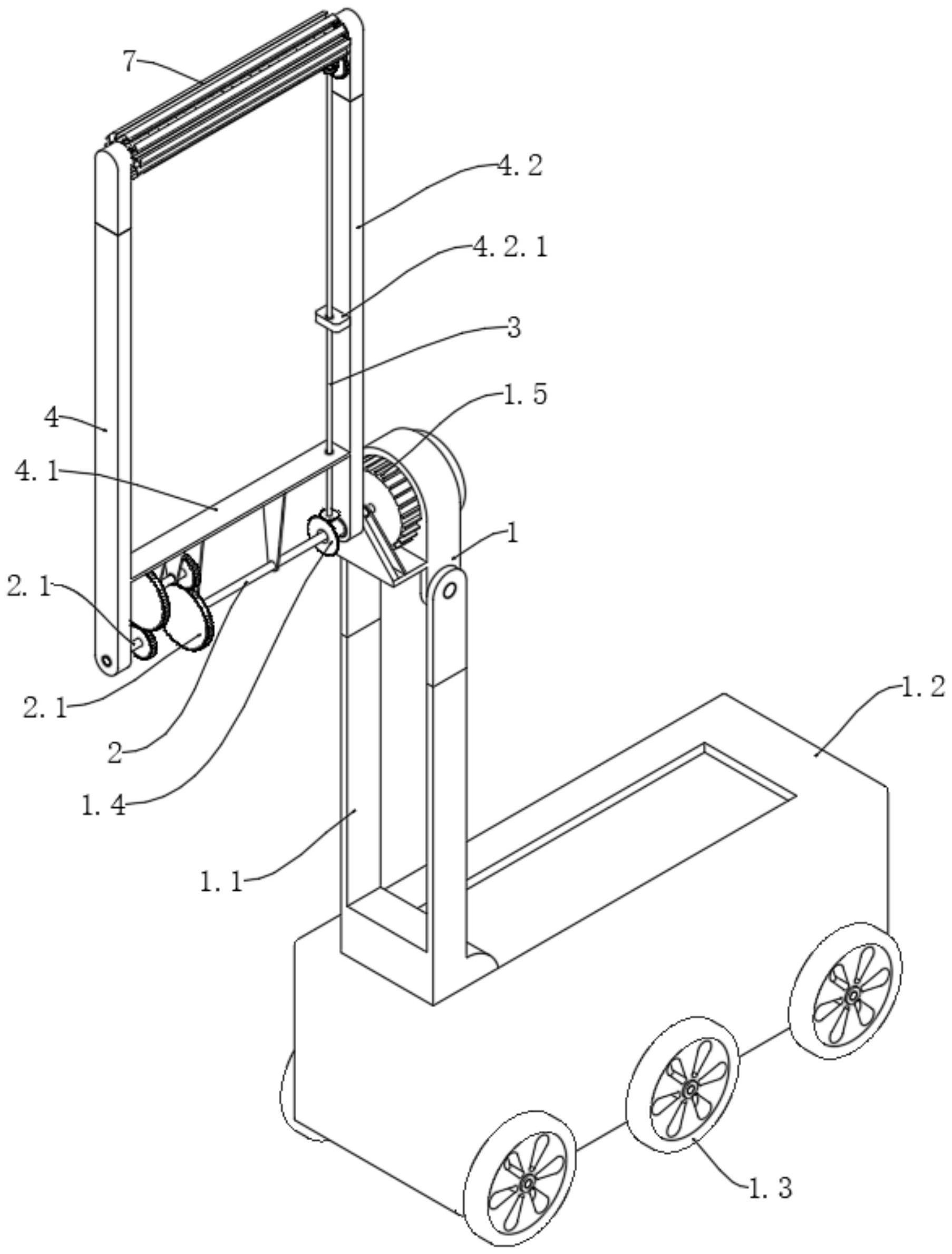
12、进一步地,所述动力支架底部与伸缩支撑架顶部为活动连接,所述伸缩支撑架外表面与机体内部为活动连接,所述机体两侧设置有行驶轮,所述动力支架顶部固定连接有锥齿空心架。
13、本发明具有如下有益效果:
14、1、本发明的刮刀组的第三刮刀片对下一个刮刀组的内壁表面停留的结垢进行清理,使刮刀组在清理污水管道内壁的结垢时,刮刀组始终保持有效的清理状态。
15、刮刀组的转向杆在通过斜杆的过程中,第一刮刀片的限位孔绕着限位杆转动一定的角度后,进行限位,第三刮刀片对下一个刮刀组的内壁表面部分停留的结垢进行清理;紧接着第二刮刀片绕着转心轴旋转,第二刮刀片上的第三刮刀片对下一个刮刀组的内壁剩余停留的结垢进行清理。
16、2、本发明的传动外壳和存储外壳的旋转方向与回收笼的旋转方向保持反向转动,使得回收笼的回收口位置始终开口朝上,便于收集结垢。
17、第二伸缩转轴随着存储外壳的转动,第二伸缩转轴的锥齿与锥齿空心架的锥齿相配合运动,并带动第二伸缩转轴的旋转,第二伸缩转轴的转动传递给第三传动锥齿轴、第一齿轮、反向齿轮和第二齿轮,第二齿轮的转动带动回收笼的旋转,使得动传动外壳和存储外壳的旋转方向与回收笼旋转方向相反,回收笼的回收口位置始终开口朝上,便于刮刀组对下一个刮刀组的内壁表面停留的结垢进行清理,结垢掉落在回收笼的内部。
18、3、本发明的清理机器人对污水管道内壁上的结垢进行有效清理,清理效果好,工作效率高。
技术特征:
1.一种污水管道内壁清理机器人,包括动力支架(1)、延伸传动轴(2)、传动外壳(4)、传动圆板(5)、限位杆(6)、刮刀组(7)和回收笼(8),其特征在于,所述刮刀组(7)内部设置有第一刮刀片(7.1),所述第一刮刀片(7.1)端部设置有第二刮刀片(7.3),且第一刮刀片(7.1)和第二刮刀片(7.3)之间设置有转心轴(7.2),且第二刮刀片(7.3)以转心轴(7.2)为中心做摆动运动,所述第二刮刀片(7.3)外表面设置有第三刮刀片(7.4),所述第二刮刀片(7.3)外表面固定连接有有转向杆(7.5),所述刮刀组(7)内部设置有回收笼(8),所述回收笼(8)外表面固定连接有斜杆(8.3),所述斜杆(8.3)外表面开设有脱离槽(8.3.1),所述回收笼(8)外表面开设有回收口(8.4),所述回收笼(8)外表面固定连接有第二齿轮(8.5),所述第二齿轮(8.5)与反向齿轮(3.2.1)相啮合,所述反向齿轮(3.2.1)与第一齿轮(3.2)相啮合,所述第一齿轮(3.2)外表面固定连接有第三传动锥齿轴(3.1),所述第三传动锥齿轴(3.1)的锥齿与第二伸缩转轴(3)一端的锥齿想啮合,所述第二伸缩转轴(3)另一端的锥齿与锥齿空心架(1.4)的锥齿相啮合。
2.根据权利要求1所述的一种污水管道内壁清理机器人,其特征在于,所述延伸传动轴(2)一端固定连接有动力电机(1.5),且延伸传动轴(2)从锥齿空心架(1.4)通孔中穿过,所述动力电机(1.5)另一端固定连接与加速齿轮组(2.1)动力接入端,所述加速齿轮组(2.1)动力输出端固定连接有第一传动锥齿轴(2.2),所述第一传动锥齿轴(2.2)与第一伸缩转轴(2.3)的一端锥齿相啮合,所述第一伸缩转轴(2.3)另一端锥齿与第二传动锥齿轴(2.4)的锥齿相啮合,所述第二传动锥齿轴(2.4)端部固定连接有传动圆板(5)。
3.根据权利要求1所述的一种污水管道内壁清理机器人,其特征在于,所述传动外壳(4)内部设置有第一伸缩转轴(2.3),且第一伸缩转轴(2.3)通过第一保持板(2.3.1)间接与传动外壳(4)连接,且第一伸缩转轴(2.3)与第一保持板(2.3.1)之间设置轴承。
4.根据权利要求3所述的一种污水管道内壁清理机器人,其特征在于,所述传动外壳(4)外表面固定连接有稳定板(4.1),且稳定板(4.1)对部分加速齿轮组(2.1)进行定位。
5.根据权利要求4所述的一种污水管道内壁清理机器人,其特征在于,所述稳定板(4.1)外表面固定连接有固定板(4.1.1),且固定板(4.1.1)的端部与延伸传动轴(2)的外表面为固定连接,所述稳定板(4.1)端部固定连接有存储外壳(4.2)。
6.根据权利要求5所述的一种污水管道内壁清理机器人,其特征在于,所述存储外壳(4.2)外表面固定连接有第二保持板(4.2.1),所述第二保持板(4.2.1)内部设置有第二伸缩转轴(3),所述存储外壳(4.2)的端部与锥齿空心架(1.4)的外表面为活动连接。
7.根据权利要求1所述的一种污水管道内壁清理机器人,其特征在于,所述传动圆板(5)的外表面与传动外壳(4)的端口为活动连接,所述传动圆板(5)外表面固定连接有限位杆(6)。
8.根据权利要求7所述的一种污水管道内壁清理机器人,其特征在于,所述限位杆(6)的位于刮刀组(7)的第一刮刀片(7.1)底端的限位孔为内部,且限位杆(6)与第一刮刀片(7.1)底端的限位孔设置有旋转角度的限位,所述限位杆(6)端部固定连接有滑块(6.1),且滑块(6.1)与回收笼(8)外表面为滑动连接。
9.根据权利要求8所述的一种污水管道内壁清理机器人,其特征在于,所述回收笼(8)内部设置有涡旋片(8.1),所述涡旋片(8.1)的轴心线处固定连接有涡旋轴(8.2),所述涡旋轴(8.2)端面与存储外壳(4.2)内表面为固定连接。
10.根据权利要求1所述的一种污水管道内壁清理机器人,其特征在于,所述动力支架(1)底部与伸缩支撑架(1.1)顶部为活动连接,所述伸缩支撑架(1.1)外表面与机体(1.2)内部为活动连接,所述机体(1.2)两侧设置有行驶轮(1.3),所述动力支架(1)顶部固定连接有锥齿空心架(1.4)。
技术总结
本发明涉及污水管道内壁清理机器人的技术领域。具体涉及一种污水管道内壁清理机器人,包括动力支架、延伸传动轴、传动外壳、传动圆板、限位杆、刮刀组和回收笼,其特征在于,所述刮刀组内部设置有第一刮刀片,所述第一刮刀片端部设置有第二刮刀片,且第一刮刀片和第二刮刀片之间设置有转心轴,且第二刮刀片以转心轴为中心做摆动运动,所述第二刮刀片外表面设置有第三刮刀片,所述第二刮刀片外表面固定连接有有转向杆。本发明具有刮刀组可对下一个刮刀组的内壁表面停留的结垢进行清理,使刮刀组在清理污水管道内壁的结垢时,始终保持与有效清理状态;污水管道内壁掉落的结垢进行收集;清理污水管道内壁的结垢清理的干净的优点。
技术研发人员:孙小江,吴娅真,孙大江
受保护的技术使用者:安徽艾特巴机械制造有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!